
车辆自适应巡航控制策略研究与仿真
2021-03-24 11:26蔡博陈韬回春
计算机时代 2021年2期
蔡博 陈韬 回春
摘 要: 为了保证车辆自适应巡航控制(ACC)系统的安全性、跟踪效果和稳定性,基于车辆安全距离模型建立了车辆自适应巡航控制模型,在Trucksim中搭建CACC跟驰控制系统;通过Simulink与Trucksim联合仿真,验证系统的可行性。仿真结果表明,在车辆编队的行驶过程中,前后车的车距始终在设定的安全距离范围内波动,具有良好的安全性;跟随车辆的相对速度和相对距离波动极小,具有良好的稳定性。
关键词: 自适应巡航控制; 安全距离; 控制模型; 联合仿真
中图分类号:TP13 文献标识码:A 文章编号:1006-8228(2021)02-21-04
Abstract: In order to ensure the safety, tracking effect and stability of the vehicle adaptive cruise control (ACC), the ACC control model is established based on vehicle safety distance model, and a cooperative adaptive cruise control (CACC) car-following system is constructed in Trucksim; the feasibility of the system is verified by the joint simulation of Simulink and Trucksim. The simulation results shows that during the process of vehicle formation driving, the distance between the front and rear vehicles fluctuated within the set safe distance, which is of good safety, while the relative speed and distance of the following vehicles fluctuated within a very narrow range, which is of good stability.
Key words: adaptive cruise control; safety distance; control model; joint simulation
0 引言
作為高级驾驶辅助系统(ADAS)的核心子系统,自适应巡航控制(ACC)系统具有定速巡航的能力,同时又能通过传感器检测获知前方车辆坐标的位置,将检测到的信息传给中央处理器进行融合,根据信息融合处理的结果,子系统控制策略将确定是否调整巡航状态,或告知驾驶员与前车之间的安全距离,从而保持本车与前车安全间距,如此极大地提升车辆安全性、减少交通事故发生率,对车辆乘坐舒适性及主动安全性都有重要意义。
ACC的主要目的是实现跟车,保证车辆安全性与稳定性,合适的控制策略和控制算法是其中的重点与难点。Ayres[1]等人结合实际情况,根据工况和车速对间距控制策略开发了基于变化的车间时距的间距策略,这种控制策略在汽车领域应用前景广阔,但是在车辆动力控制中应用不是很成熟;Burgett[2]等人基于车道变换,建立了车辆跟车安全间距策略;武汉理工大学李想[3]等人提出了一种采用变权重系数的线性二次型最优控制算法,利用采集的车辆速度建立模糊控制器,动态选取线性二次型调节器的权重系数,从而得到最优的目标加速度;华南理工大学赵克刚[4]等人根据车辆运动学方程和轨迹跟踪状态,建立轨迹跟踪误差模型,采用线性二次型最优控制方法,以动态跟踪误差、控制能量消耗综合最优为目标,通过不同速度时的目标权重系数调整,实现了速度自适应的车辆轨迹跟踪最优控制;浙江大学罗莉华[5]等人在模型预测控制的框架下,将汽车自适应巡航控制算法设计转化为带约束的线性二次优化问题,该控制系统对于非线性控制系统有较强的适应性。目前的研究虽然能够针对车辆ACC功能实现在特定条件下有一定的效果与作用,但是在两车安全距离控制效果、稳定性、安全性等方面还有很大的局限性。
本研究在建立复杂条件下的车辆动力学模型基础上,利用雷达传感器获取本车和周围车辆的信息,考虑车辆行驶的安全性、稳定性和高效性,提出一种具有实时性的安全距离算法,考虑车辆相对速度和相对距离,使用安全距离控制算法搭建车辆自适应巡航控制模型,最终实现对车辆的实时控制。最后通过Trucksim和Simulink联合仿真验证实验,把目标速度和相对距离与实际速度和实际相对距离进行对比分析,验证车辆动力学模型和控制算法的有效性和实时性。
1 CACC跟驰距离建模
在Trucksim中搭建车辆的整车模型,通过雷达系统将探测到的信息传递给安全距离控制模块,经过处理和计算后得到期望加速度并输出至车辆控制系统,车辆控制系统按照此期望加速度输出节气门开度和制动压力值至执行机构进行制动调节[6],将该信息传输至后车的信息感知模块,为后车实现自适应巡航提供信息。本文所使用的安全距离公式[7]如下:
根据此安全距离模型,搭建自适应巡航的安全行车间距控制系统,如图1所示。
考虑到验证车辆队列的安全性和稳定性,本文在ACC安全距离模型的基础上,建立一个行驶在道路状况良好的CACC车队,该车队包括一辆头车和四辆跟随车辆,车队中的车辆可以通过V2V通信技术将车队信息由头车同时传递到跟随车辆1、2、3、4,编队车辆如图2所示。
2 仿真分析与工况设置
为验证设计的车辆自适应巡航控制模型,选取了直道前车加速工况、直道前车减速工况、以及弯道前车加减速行驶工况这三种典型工况进行仿真试验,通过判断行驶过程中车辆能不能有效避免碰撞来评价安全性,通过分析速度、车间距的调整及其跟踪性能来评价系统的跟车性。在直道前车加速工况中设置前车初始车速为50km/h运行时间为5秒,之后开始在20s内匀加速至70km/h,道路为3000m长直线;直道前车减速工况设置情况与前车加速工况相同为3000m长直线,速度设置为前车初始车速为70km/h运行时间为5s,之后在20s内匀减速至70km/h;弯道前车加减速行驶工况道路设置为直道弯道混合的道路,但在选择道路上,为了体现道路的复杂性,特选取景区公路作为工况测试道路,进行速度工况设置时考虑到验证为复杂情况,故而对车辆速度无规律要求。三种工况的首车速度如图3、图4、图5所示。考虑到卡车的惯性问题,本实验采用的安全相对距离设定值50m。
3 仿真试验
3.1 前车加速工况仿真验证
完成相关参数设置后,仿真结果如图6、7所示,从中可以看出,因前车在5~25s之间做匀加速行驶,速度也随之增加,随着第一辆车车速的快速升高,第二辆车能有效跟踪前车,在5s时立即进入加速行驶状态,速度也随之升高,第三、四、五辆车同步感知第一辆车的行驶工况自动提升车辆速度。在相对速度和相对距离的同时调节下,编队车辆之间的相对距离始终围绕设定值波动,且波动范围很小。
从上述仿真结果可知,在前车加速工况,所设计的车辆自适应巡航模型能有效的控制车辆跟踪前车,并始终能在期望的安全距离内行驶。
3.2 前车减速工况仿真验证
仿真结果如图8、图9所示,从图中可以知道,前车在5~25s之间做匀减速行驶,因此速度也随之减小。尽管第一辆车的车速迅速降低,第二辆车仍能有效跟踪前车,由于第二辆车与第一辆车的相对距离较大,为了提高交通道路使用率,在5s时并没有立即进入减速行驶状态,而是保持继续加速,速度随之升高,相对距离逐渐变小。车辆根据ACC安全距离模型,综合考虑相对速度和相对位移之后,将车距控制在设定值附近。第三、四、五辆车同步感知第一辆车的行驶工况并自动调节车辆速度。在同时考虑相对速度和相对距离的情况下,车辆编队的相对距离始终围绕设定值波动,且波动范围很小。
通过上述仿真结果可知,在前车匀减速工况下,所设计的车辆自适应巡航模型,能有效的控制车辆跟踪前车,并始终能在期望的安全距离内行驶。
3.3 弯道加减速行驶工况仿真验证
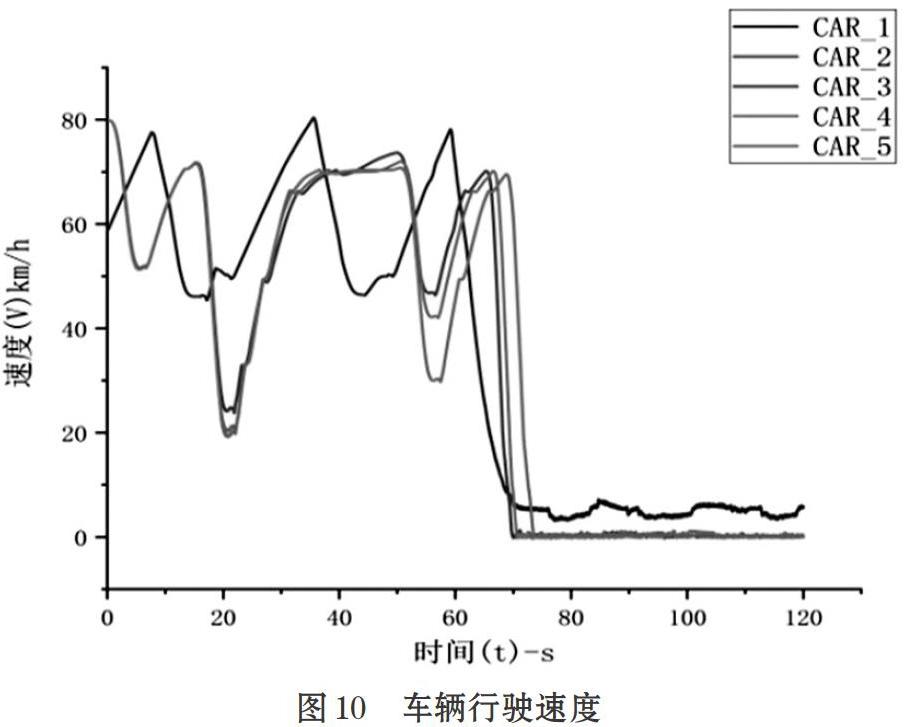
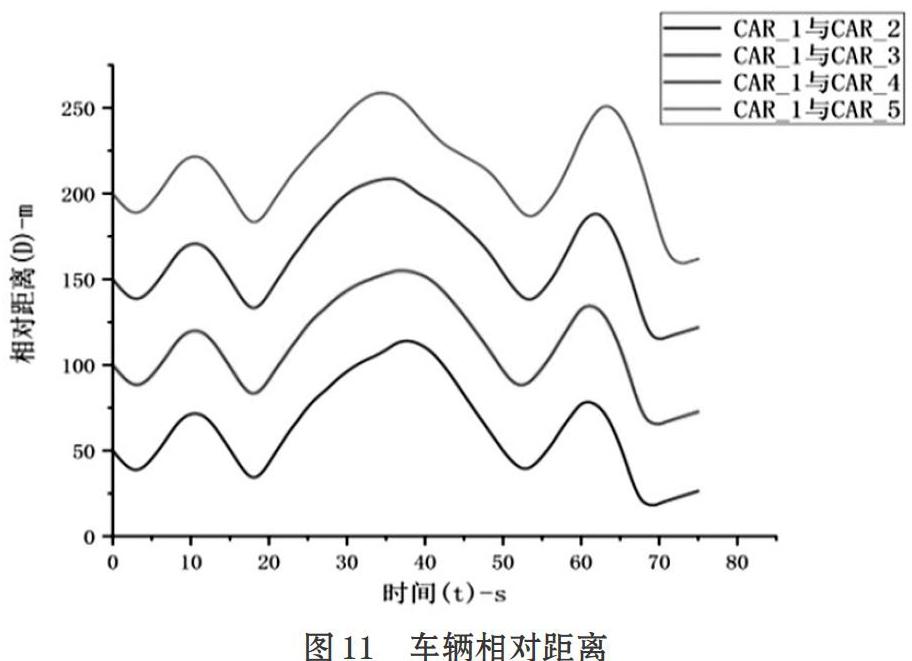
前车在复杂工况下行驶的仿真结果如图10、图11所示。从图中可以看出,第一辆车的速度是不确定、无规律的,既存在加速工况又存在减速工况,这对整个车队信息感知和速度调整的灵敏度要求很高,但从仿真结果可以看车,后车在感知前车信息后,仍然能够迅速根据相对速度和相对距离情况综合分析,控制自车车速。车辆在允许范围内进行运动,未发生碰撞,尽管第一辆车与第二辆车的相对距离变化较大,但第二、三、四、五车之间的相对距离稳定,且都是在安全距离设定值附近。
通过上述仿真结果可知,尽管前车的行驶工况复杂,所设计的车辆自适应巡航模型能有效的控制车辆跟踪前车,并最终能在期望的安全距离内行驶。
4 结束语
本文基于安全距离模型,建立了CACC跟驰控制算法,在Simulink中建立了CACC跟驰控制模型,进行了Trucksim、Simulink联合仿真,在前车匀加速、前车匀减速以及弯道加减速这三种工况下进行了仿真验证。仿真结果表明,考虑相对车速和相对距离的控制策略,不仅保证了车辆行驶过程中的安全性,还可以使车辆与车辆间具有较好的跟随精度,验证了所设计控制系统的有效性。
参考文献(References):
[1] Ayres T J, Li L, Schleuning D, et al. Preferred Time-Headway of Highway Drivers.Proceedings of the Intelligent Transportation System[C] //2001 Proceedings 2001 IEEE, F,2001.
[2] Burgett AL, Carter A, Miller R J, et al. A Collision Warning Algorithm for Rear-End Collisions;Proceeding of the 16th International Technical Conference on Enhanced Safety of Vehicles(ESV)[C] //Windsor, Canada, F,1998.
[3] 李想,曾春年,罗杰,et al.基于线性二次型最优控制的自适应巡航控制算法研究[J].武汉理工大学学报(信息与管理工程版),2019.41(2):191-196
[4] 赵克刚,郭泉成,裴锋,梁政焘.基于最优控制的智能车轨迹跟踪算法[J].机械与电子,2018.36(7):76-80
[5] Luo L H,Bu H,Li P,et a1.Model predictive control for adaptive cruise control with multi—objectives:comfort,fuel-economy,safety and car-following[J].Journal of Zhejiang University Science A,2010.11(3):191-201
[6] 何德峰,崔靖龍,何文韬.自主车辆高效多目标预测巡航控制[J].浙江工业大学学报,2020.48(4):355-360
[7] Bierley, R.L(1963). Investigation of an inter vehicle spacing display.High w. Res.Rec.,25,58-75
