基于矢量水听器的水下声学浮标系统设计*
2021-03-23 09:24:26孙芹东马士全巍1王文龙1
电子器件 2021年1期
孙芹东,马士全,孙 巍1,,王文龙1,
(1.海军潜艇学院,山东 青岛266199;2.青岛海洋科学与技术试点国家实验室,山东 青岛266237)
“HM-2000”剖面浮标,依靠平台底部油囊调节浮力实现升沉,只在水面通信和调整净浮力时消耗少量能源,具有低功耗、高效率、长时续、低成本等特点,浮标可以在海洋中多次沉浮,测量2 000 m 以浅范围内的海洋温度、盐度及深度数据[1],并在海面通过北斗卫星进行定位及数据传输[2],接收岸站剖面启动、参数设置等指令信息,“HM-2000”剖面浮标平台技术成熟,已广泛应用于海洋和大气科学基础研究、深远海资源开发、海战场环境保障等领域[3]。
姿态感知复合同振式矢量水听器具有低频、小尺寸的特点,可同时获取所在声场声中心处声压和二维质点加速度、以及矢量水听器实时姿态信息,通过信号处理得到目标相对于地理坐标系的方位信息[4-5]。 本文旨在发挥浮标平台低功耗、长时续和矢量水听器低频、小尺寸、高可靠性等优势[6-8],设计一种用于海洋目标水声信号探测的水下声学浮标系统,该系统可自主完成水声信号采集、目标探测、跟踪、属性自主判别、与浮标主控系统信息交互的工作流程,具有低噪声、小体积、低成本、高效率、低维护费用、可重复使用、布放回收方便等特点,本文研究对姿态感知复合同振式矢量水听器在水下缓动声呐平台的应用具有一定指导意义。
1 水下声学浮标系统设计
水下声学浮标系统结构如图1 所示,主要包括矢量水听器、水声信号滤波放大模块和A/D 转换模块、FPGA 主控和DSP 信号处理模块、浮标主控系统;其整体结构如图2 所示,采用模块化设计,矢量水听器固定于浮标基础平台上部连接杆顶端,连接杆另一端固定在浮标基础平台顶部,矢量水听器用弹性元件悬挂于加肋导流罩内部,导流罩采用聚氨酯透声材料,以降低系统工作时流噪声影响[9-10]和确保声波的传播,矢量水听器和水声信息实时采集与分析单元间通过水密电缆实现信息传输。

图1 水下声学浮标系统结构框图
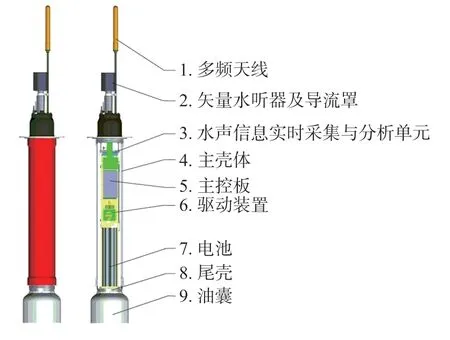
图2 水下声学浮标系统结构示意图
矢量水听器的输出信息包括三路水声信息和自身实时姿态信息,其工作时序受水声信息实时采集与分析单元FPGA 控制,四路水声信息经过滤波放大、A/D 转换后到达DSP 数据处理模块,DSP 完成水声信息和姿态信息的联合信号处理,给出目标连续方位和被探测目标的属性信息,完成与浮标主控系统的信息交互。
1.1 姿态感知复合同振式矢量水听器设计
姿态感知复合同振式矢量水听器是在常规矢量水听器技术基础上,依据姿态感知原理,选取MEMS姿态传感器作为其姿态感知元件[11]。 MEMS 姿态传感器内置三轴MEMS 陀螺仪、三轴MEMS 加速度计和三轴MEMS 磁力计,重力加速度方向和地磁北方向正交,从而唯一确定一个三维空间的姿态,利用三轴MEMS 加速度计检测的重力加速度和三轴MEMS 磁力计检测的磁北参数数据来对三轴MEMS陀螺仪解算姿态进行实时更新与校正。
为减小装配误差,尽量使三轴MEMS 陀螺仪、三轴MEMS 加速度计和三轴MEMS 磁力计的观测中心和观测轴重合,选用了MPU9150 传感器作为敏感器件。 MPU9150 在一个芯片上同时集成了三轴MEMS 陀螺仪、三轴MEMS 加速度计和三轴MEMS磁力计,能够最大限度地减小装配误差,且其测量精度在微型MEMS 惯性器件中是最好的。 图3 为制作完成后的MEMS 姿态传感器,其各角度动态测量范围和精度如表1 所示,可满足姿态感知复合同振式矢量水听器应用要求。
图3 MEMS 姿态传感器
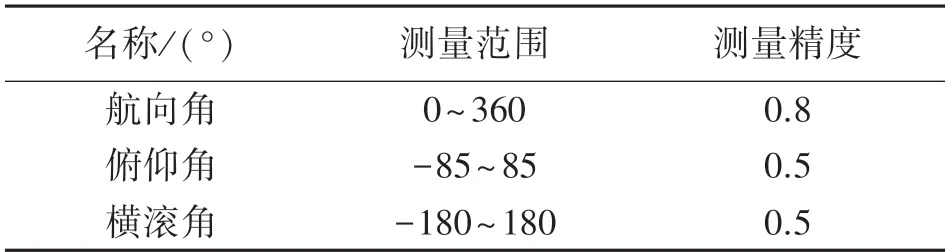
表1 姿态传感器参数列表
姿态感知复合同振式矢量外形为圆柱体两端带半球帽的不规则圆柱体,水听器外形尺寸为Φ66×78 mm,工作频带20 Hz~1 000 Hz,实际使用时用弹簧或橡皮筋悬挂在刚性框架内。 图4 给出了在驻波管测试的矢量水听器各通道工作频带内灵敏度结果,图5 给出了在驻波管测试的不同频点处矢量水听器各通道指向性结果。
由图4 矢量水听器灵敏度测试结果可知,声压通道灵敏度级为163.2 dB(0 dB =1 V/μPa),测试频带内灵敏度起伏为±0.6 dB,测试灵敏度值与理论值吻合较好;矢量通道灵敏度级为-173.3 dB(@100 Hz,0 dB =1 V/μPa),两个矢量通道测试值与理论值基本吻合,且两个矢量通道灵敏度一致性较好。
由图5 矢量水听器各通道不同频点处指向性测试结果可知,声压通道具有全指向性,在400 Hz 频点处最大值不均匀性为0.5 dB;矢量通道具有余弦指向性,x 通道在250 Hz 频点处最大值不均匀性为1.0 dB、凹点深度36.8 dB,y 通道在800 Hz 频点处最大值不均匀性为0.3 dB、凹点深度35.2 dB,两矢量通道主轴方向灵敏度最大值对称性较好,与主轴垂直方向灵敏度最小值对称性方面y 通道相比于x通道略差,可能是测试时悬挂不对称导致。

图4 矢量水听器灵敏度测试结果

图5 矢量水听器指向性测试结果
1.2 矢量水听器信号调理与采集电路设计
由于矢量水听器在实际工作中易受到周围环境噪声的影响,在进行模拟数字信号转换时,需对矢量水听器的信号进行预处理。 首先通过低噪声放大器进行微弱信号的放大,然后使用五阶贝塞尔滤波器进行高频噪声信号的滤除。 由于高精度ADC 的模拟输入接口通常为差分输入,所以需要将滤波器的单端信号通过单端转差分电路进行处理。 最后通过高精度的ADC 进行模数转换。
本文选用的ADC 为24 位的AD7768,该芯片动态范围最高可达115 dB,功耗最低可达9 mW/通道,同时其积分非线性、偏移误差和增益误差都非常小,是一款非常理想的音频采集芯片。 选取TI 公司生产的具有超低噪声、超低失真度、单位增益稳定的电压反馈型运算放大器OPA4140,搭建贝塞尔结构型五阶低通滤波电路,该滤波电路的设计使用可降低信号的失真度以及压缩噪声带宽。

图6 模拟信号调理结构图
1.3 数据处理模块
数据处理模块以FPGA 和高性能DSP 为主要核心,实现对矢量水听器的信号采集、数据存储、目标属性判别等功能。

图7 数据处理平台原理框图
矢量水听器信号经模拟信号调理电路、数模转换电路后,通过FPGA 控制,将转换后的数字信号按照一定的数据格式传输至DSP。 DSP 对采集到的水声信息以及姿态信息进行联合处理,获取目标方位信息,并通过人工智能算法对探测目标属性进行判别,决定是否进行预警上报。 同时将处理后的数据回传至FPGA,由FPGA 负责将数据存储至板载存储单元。 后期可通过以太网将存储数据上传至电脑,进行数据回放和场景重现。
2 海上试验结果
2018 年,在南海北部海域,应用设计的水下声学浮标系统开展目标探测能力试验验证,600 t 级科考船作为配合目标,水下声学浮标系统采用定深漂流方式采集配合目标辐射噪声信号,设置定漂深度为(100±50)m。

图8 水下声学浮标系统与科考船位置及矢量水听器姿态信息
如图8(a)所示,水下声学浮标系统06:07 时刻入水下潜、14:21 时刻浮出水面,水下连续工作时长约8 h,并沿327°方向漂离布放位置点8 km,定漂速度约为0.5 节,系统09:01 时刻开始采集科考船辐射噪声信号。 科考船09:01 时刻位S1 点,以10 节航速、340°航向驶向S2 点;09:15 时刻位S2 点转向、距离S3 点(为水下声学浮标系统推算位置点)约7.1 km,相对水下声学浮标系统方位为333°,转向完毕后以10 节航速、160°航向驶向S4 点;09:40 时刻位S3 点,与水下声学浮标系统推算位置近似重合;10:14 时刻位S4 点停船,S4 点距离S3 点约10.3 km,相对水下声学浮标系统方位为163°。 如图8(b)所示,为09:01 ~10:14时间段内姿态传感器采集的矢量水听器姿态信息,也间接反映了水下声学浮标系统姿态信息,航向角输出结果说明,水下声学浮标系统在海流作用下存在缓慢转动;俯仰角和横滚角输出数值,说明水下声学浮标系统水平姿态比较稳定。
如图9(a)所示,为矢量水听器姿态校正前水下声学浮标系统解算输出科考船目标方位与GPS 推算方位历程图。 如图9(b)所示,为矢量水听器姿态校正后水下声学浮标系统解算输出科考船目标方位与GPS 推算方位历程图。 如图9(c)所示,为科考船相对水下声学浮标系统距离历程图。 结果显示:(1)姿态校正前,水下声学浮标系统解算科考船目标方位与GPS 推算方位差别较大,姿态校正后解算方位与GPS推算方位基本吻合;(2)09:01 时刻,科考船位S1 点、距离S3 点约3.0 km、相对水下声学浮标系统方位为333°,09:15 时刻,科考船位S2 点、距离S3 点约7.1 km、相对水下声学浮标系统方位为333°,09:40 时刻,科考船与S3 点基本重合,10:14 时刻,科考船位S4点、距离S3 点10.3 km、相对水下声学浮标系统方位为163°,均与图8(a)所示相吻合;(3)10:14 时刻,科考船位S4 点停机,未能检验水下声学浮标系统对其最远探测距离。

图9 水下声学浮标系统目标探测试验结果
3 结束语
本文依据矢量水听器姿态感知原理,设计制作姿态感知复合同振式矢量水听器,采用FPGA+DSP 架构设计制作数据采集与实时分析单元,为充分发挥矢量水听器和浮标平台优势,研发可应用于海洋目标水声信号探测的水下声学浮标系统。 海上试验结果表明,姿态感知复合同振式矢量水听器可在20 Hz ~1 000 Hz 范围内采集目标辐射噪声信号,姿态数据输出准确,水下声学浮标系统在定深漂流工作模式,对600 t 级、10 节航速航行科考船探测距离≥10.3 km。本文相关研究对矢量水听器在水下缓动声呐平台工程应用具有一定的指导意义。
猜你喜欢
军事文摘(2023年22期)2023-12-19 06:41:10
军事文摘(2023年16期)2023-09-04 07:10:44
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
电声技术(2022年3期)2022-04-28 00:22:50
应用科技(2020年1期)2020-06-18 02:02:36
船舶标准化工程师(2020年1期)2020-06-12 09:16:34
舰船科学技术(2016年1期)2016-02-27 15:39:27