新一代防撞系统ACASX技术发展浅议
2021-03-19 01:17:44四川九洲空管科技责任有限公司彭勃滔李家蓬卢晓霞
电子世界 2021年3期
四川九洲空管科技责任有限公司 彭勃滔 李 扬 谢 莉 李家蓬 卢晓霞 皈 勇
1 机载防撞系统的发展历程
在早期航空业中,飞机的数量少,航线的间隔大,有足够宽广的空域,所以飞机碰撞事件很少发生。随着航空业务的推进与发展,飞机出行已经变得司空见惯,天空变得拥挤,同时极大增加了飞机碰撞的可能性,因此防撞系统的需求日益迫切。而空中飞行安全通过战略层规划、交通层管理、机载自主防撞规避三个层次来实现,其中机载防撞位于第三层,它独立于地面交通管制系统,并提供载机自主威胁探测与防撞规避建议,是防止空中交通碰撞事故发生的最后屏障,是确保航空飞行安全等级的必要手段。
为了应对一系列涉及商用客机的半空中碰撞事件,林肯实验室在20世纪70年代受联邦航空管理局(Federal Aviation Administration)的指示,参与了机载防撞系统的开发。从目前的情况来看,交通警报和防撞系统在全世界所有大型飞机上都得到了授权,大大提高了空中旅行的安全性,但未来几年计划对空域进行的重大改变将需要对该系统进行实质性修改。最近,林肯实验室率先开发了一种新的避碰系统方法,完全重新考虑了这些系统的设计方式,使系统能够在不干扰正常安全操作的情况下提供更高程度的安全性,这就是ACAS X防撞系统。与目前应用最广泛的防撞系统TACS相比,下一代机载防撞系统ACAS X采用了全新的防撞逻辑方法,减少了空中相撞风险,并将防撞保护扩展到新的飞机平台,并利用最新的计算机技术,开创了将决策理论方法应用于防撞逻辑的先河。与TCAS II的基于确定性模型的逻辑不同,ACAS X的逻辑使用概率特征模型来表示各种不确定性来源(如飞行员不响应、监视错误等)和计算机优化来考虑由系统专家和操作用户定义的安全性和操作的合理性。这种新的灵活的防撞逻辑方法与下一代航空运输系统的空域程序和技术完全兼容。
2 ACAS X特点与优势
在新一代空管运行体系对空中防相撞提出的需求,ACASX应满足空域运行标准、符合新的应用操作程序、兼容通航、无人机等不同平台,如表1所示。
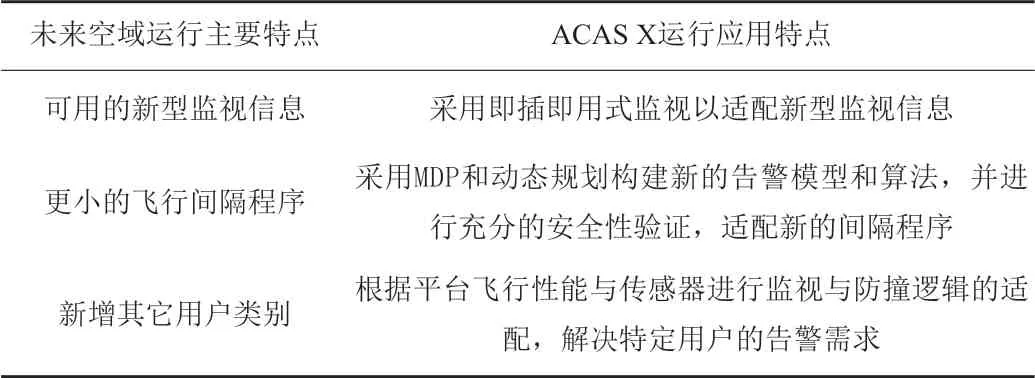
表1 ACAS运行应用特点
除了与下一代航空运输系统兼容之外,ACAS X改善了航空旅行的安全性,并提供了比TCASII更好地操作适应性;与TCAS II相比,ACAS X减少了59%的空中相撞风险和25%不必要的干扰性警报。除了提升世界各地所有大型商用飞机的飞行安全,ACAS X还受到飞行员的欢迎。具体优势如下:
(1)容纳新的监视输入,提供比目前使用的应答机更详细和更精确的跟踪数据。(2)有助于降低燃料代价,减少排放量,缩短飞行时间,以及提高到达机场的机率。(3)尽量减少正常空中交通流量的中断次数。(4)减轻与系统实施和升级有关的制造、运行操作及其成本。(5)促进无人驾驶飞机在国防和商业应用中的推广使用。
3 针对不同平台的ACAS X版本
ACAS X具有4中版本或子项,具体如表2所示:
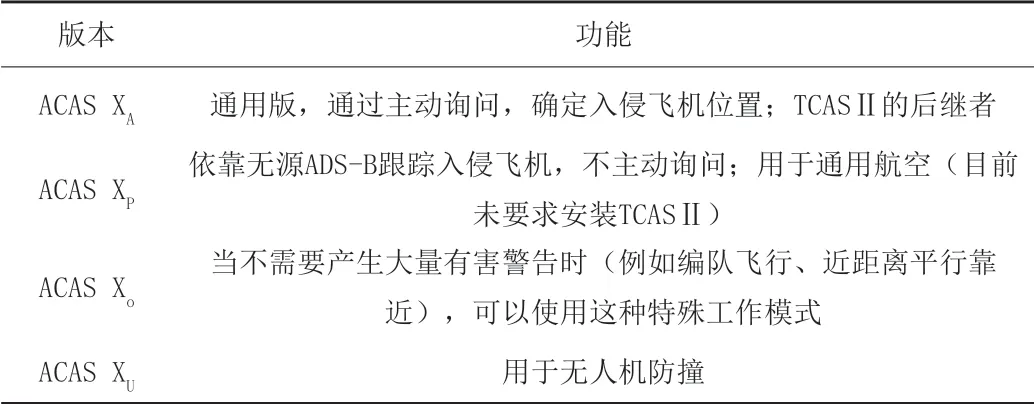
表2 ACAS X的4种版本
ACAS Xa(active):以新的架构模型设计、优化并替代现有ACAS系统,基于SSR和ADS-B混合监视方式实现。
ACAS Xp(passive):该子项为基于ADS-B的机制监视和告警技术,用于通航飞机;通过被动接收ADS-B信息,对目标进行监视跟踪,并提供基于飞机性能范围优化的交通告警和垂直指示。
ACAS Xo(operatiaon):为飞行程序/流程提供具体的操作指示,例如:为毗邻的并行跑道上的飞机操作、编队飞行等场景提供提示。
ACAS Xu(unmanned):为无人机设计,允许多源监视信息输入,并且为宽范围容量性能进行了逻辑优化,该项研究需攻克即插即用的多源数据监视算法。
4 ACAS X 组成及功能特点
ACAS X作为复杂的航空电子系统,安装并运行在飞机的通常称之为本机或载机。ACAS X需要接收载机信息,无线电高度、大气高度信息,并与载机的显示和控制系统相交联。通过即插即用式监视,ACAS X系统可载机雷达、光电、红外等传感器进行交联,接收其探测到的目标飞机信息作为监视信源,当这些信息满足要求时也可用于TRM模块的交通告警和决断告警。图中S模式应答机是独立式涉及,在综合监视系统(参照ARINC768)中ACAS X处理机与S模式应答机、ADS-B乃至近地告警、气象雷等功能单元可以集成到一个机箱内,原理样机设计采用了综合监视系统架构。ACAS X系统架构框图如图1所示。

图1 ACAS X系统功能架构框图
该系统实现了硬件和软件两方面的功能,包括4元阵列的定向天线系统。该系统和TCASII之间的主要区别在于“ACAS X处理器单元”,它实现对空域目标的航迹监视并发布告警建议。在这个处理器中,ACAS X的主要软件是前端监视模块(RFS)、监视与跟踪模块(STM)、威胁决断模块(TRM)。系统需要各类本载机和传感器探测的空域目标信息的各输入,输出是对空域态势信息、对载机飞行的指示和告警。
4.1 系统外部接口
ACAS X系统外部接口包括:
(1)S模式应答机(以及通过应答器的高度计)控制面板(选择操作模式)(可与其他控制结合使用面板输入,如模式控制面板)。
(2)离散输入系统(设定飞机运行特性)、无线电高度计。
(3)任何已在外部系统中解码的ADS_B数据,并传递给ACAS X。来自共同拥有的发射系统的抑制脉冲数据(潜在的)来自1030/1090兆赫系统的交联数据,以实现特定的应用程序。
(4)飞行员向驾驶舱交通信息显示器或某些其他待定义的ACAS X界面输入信息,以选择目标与ACAS XP和ACAS XO的接口尚未完全定义,尽管它们是上述接口的子集。
4.2 监视与跟踪模块
TCAS II和ACAS X之间存在的一个基本设计差异是监视功能和威胁解决逻辑之间的内部接口。ACAS X将要求所有跟踪算法都包含在扫描隧道显微镜中。TRM中的威胁逻辑不再接受测量值作为输入,而是接受目标的跟踪状态信息。跟踪功能的这一转变有效地将跟踪与跟踪分离开来,并建立了一个新的CAS设计范例,ACAS X将允许单一的优化威胁逻辑与任何监视源兼容(如信标询问、ADS_B、电光、主雷达等),或满足最低性能要求的来源组合。
为了利用ACAS X的这一特点,STM必须设计成能处理多种监视源,以适应安装在其他飞机上的任何监视硬件。这样做实现了“即插即用监控”概念的一个组成部分,即所有ACAS X监视源将由单一版本的扫描隧道显微镜接收(即插入)。扫描隧道显微镜将自动识别收到的每个监控信息,对其进行处理,并使用它来跟踪相关的入侵者,而不需要手动配置或额外的编程。
这意味着扫描隧道显微镜将动态地“插入”所有被批准的监视数据源,这些数据源可以帮助追踪目标。例如,假设ACAS X有能力发送信标询问,接收UAT ADS_B数据,并配备了一个光电传感器。如果一架目标飞机有一个转发器,ACAS X将询问目标飞机。如果那架目标飞机没有转发器,而是广播UAT数据,那么ACAS X将接收并处理UAT数据。如果目标飞机既有转发器又有广播的UAT数据,ACAS X将询问目标飞机,并接收和处理其答复和UAT数据。不管目标飞机上安装了什么航空电子设备,只要飞机在可见范围内,ACAS X将在目标上使用光电传感器。
每一类ACAS X (ACAS XA、ACAS XP、ACAS XO或UAS的未来版本)都将利用基于传感能力的“即插即用监控”概念由安装在ACAS X飞机上的硬件提供。ACAS X监视的初始设计将集中在三个级别:
(1)XA,它具有主动发送信标询问的能力。
(2)XP,它将只依赖被动ADS_B数据。
(3)XO,这将使ACAS X与特定的操作更加兼容。
ACAS X STM和TRM之间将存在一个标准接口。定义这一标准接口实现了“即插即用监控”的第二个组成部分,即任何ACAS X TRM将与单一版本的STM无缝连接和工作。即插即用监视的这一方面将允许一个扫描隧道显微镜的设计与ACAS XA、XP和XO的优化威胁逻辑兼容。
为了使“即插即用监视”成为一个有效的解决方案,扫描隧道显微镜必须能够为入侵者的位置和速度提供不确定性。因此,扫描隧道显微镜将提供每个参数的分布,而不是标量值。给定所提供的不确定性,TRM将使用该分布信息为每架目标飞机选择最佳行动。
4.3 集中跟踪(Tracking)

图2 代价表离线优化及在线使用流程
ACAS X系统将集中跟踪该系统。期望实现这一点的方法包括使用专门的跟踪器/过滤器。这些跟踪滤波器擅长组合来自各种来源的输入,提供目标位置和速度的最佳估计,并考虑滤波器输入测量和输出的不确定性。一组估计状态和相关权重(代表这些状态不确定性的概率)将被传递给TRM。
4.4 优化的威胁决断逻辑
用于优化威胁逻辑的概念是由麻省理工学院林肯实验室在几年的时间里发展起来的。优化的威胁逻辑是“离线”生成的;也就是说,在ACAS X安装到飞机上之前,优化是在计算机系统上完成的,具体流程如图2所示。给定一组状态变量,这些表对要选择的最佳动作进行编码。存储这些逻辑表的航空电子系统面临的挑战是,通过改进监视、跟踪和估算技术,尽可能准确地估算这些状态变量,以解决准确性问题。
4.5 显示与告警通报
机组人员目前与TCAS II系统进行的交互将保持不变,使用的RA决断告警类型与TCAS 7.1相同。尽可能快地提示飞行员,以便于对最终的任务指令做出更快的反应。目前正在进行研究,以确保在将这些警报纳入ACAS X系统的框架内的同时,仍能实现发布警报效益。并且与接收和处理ADS_B数据的系统(称为飞机监视应用系统(ASAS))的交互可能会改变一些飞行员程序。ASAS允许飞行员为特殊应用选择飞机,如成对进近,这可能使用减少的分离规则,这反过来可能导致不必要的高RAs率。为了解决这个问题,预计在ACAS X系统上将有一个辅助功能,允许选择目标。该选择将允许系统使用不同的逻辑表或选择算法来发布RAs。
结语:航空业的发展,为防撞系统带来的新的挑战与要求。从最开始的信标防撞系统BCS到目前广泛应用的TACS,再到不久将大量使用的机载防撞系统X(ACAS X),都是为了适应当时航空需求而不断完善为一个更加健壮系统的过程。从完善传感器到越来越先进的算法,新的技术为防撞系统的发展带来了可能性,而如今的ACAS X将对监视和咨询逻辑进行重大改进。该系统将从对TCAS的仅信标监视转变为支持基于全球定位系统(GPS)数据的监视,并适应新的传感器模式的即插即用监视架构,包括雷达和光电传感器,这对无人平台尤为重要。新的监视能力还将为新的用户类别提供防撞保护,包括目前未配备TCAS的小型通用航空飞机。
ACAS X代表了咨询逻辑生成和表示方式的一次重大革命。ACAS X不是使用基于规则的特殊伪码,而是使用一个针对空域模型进行了优化的数字表来表示逻辑。这种新方法提高了健壮性,支持新的需求,并减少了不必要的警报。ACAS X采用的过程大大简化了开发,预计将大大降低实施和维护成本。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:44:24
中学生百科·大语文(2021年11期)2021-12-05 14:27:54
纺织科学研究(2021年7期)2021-08-14 01:42:34
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
37°女人(2017年11期)2017-11-14 20:27:40
中国公路(2017年13期)2017-02-06 03:16:33
西南交通大学学报(2016年4期)2016-06-15 20:29:36
海峡科技与产业(2016年3期)2016-05-17 04:32:11