
无人机静电喷雾治理开放性粉尘的数值模拟
2021-03-19 14:17高春雪吴松林刘秋新
制冷与空调 2021年1期
高春雪 杨 树 吴松林 刘秋新,2
无人机静电喷雾治理开放性粉尘的数值模拟
高春雪1杨 树1吴松林1刘秋新1,2
(1.武汉科技大学 武汉 430065;2.武汉科技大学城市学院 武汉 430083)
将静电喷雾技术与无人机技术相结合用于治理开放性粉尘,使用Fluent对粉尘的扩散模型进行数值模拟。模拟得出无人机工作高7m,喷雾压力为0.2MPa时,无人机静电喷雾的平均降尘效率能达到85.87%,并在自然风速为1m/s、空气相对湿度为70%时,局部区域的降尘效率高达95.93%。本文提出的无人机静电喷雾控制开放性粉尘技术降尘效果较好,对沉降重金属污染粉尘技术发展有重要意义。
开放性粉尘;Fluent;静电喷雾;无人机;数值模拟
0 引言
用于土壤修复方法中的物理修复技术需要对土壤进行移动,而在土壤移动的过程中会产生大量被重金属污染的开放性粉尘,这些粉尘随着气流会散发到更远的地方而造成环境污染。开放性粉尘,指的是尘源多、随机分布、覆盖面较广、具有阵发性产尘性质的粉尘,这些粉尘未经通风除尘系统进行处理,通过自然气流直接散发到空气中,是空气污染的主要来源之一。
静电喷雾降尘是治理开放性粉尘的方法之一,静电喷雾技术是近些年来发展起来的新技术,相对于其他降尘形式,优点在于降尘效率较高,使用比较方便。S Edward Law[1]等研究了整个20世纪众多研究人员的科学和工程贡献,他们的工作确立了可靠的粉尘和喷雾装药方法的基本依据和技术实施,并回顾了开发用于静电沉积农业微粒的各种系统。周新建[2]等提出了计算尘粒在雾滴表面捕集效率的方法,分析了尘粒、捕尘体荷电性不同时在流场中的捕集效率。通过计算得出雾滴和尘粒均带有荷电时捕集过程发生在雾滴表面,松弛时间与捕集效率成正比的关系,可减小雾滴粒径或者增大相对速度以提高降尘效率。
近年来,无人机技术已成为热门话题,该技术最早是在20世纪50~90年代被美国研发利用,用于军事方面的侦查或者情报收集。随后,日本利用无人机技术对大米进行了播种和农药喷洒,在民用领域初步发展。已经有一些学者将静电喷雾技术与无人机技术结合起来[3-9],研究雾滴粒径分布、无人机飞行稳定性等方面的内容,但都是研究其在农业植保领域中的利用,关于降尘方面的研究较少。茹煜[10]等将静电喷雾系统搭载于XY8D型无人机,通过无人机低空低量喷雾的实验,为提高无人机施药后的雾滴沉积效果,研究静态条件下静电喷雾雾滴的雾化、荷电性能,确定了该无人机的试验作业参数。静电作用对增加雾滴沉积有明显的效果,最佳的无人机静电喷雾作业参数还与风速、温度、湿度等环境因素及药液物理特性的影响有关。
本文将静电喷雾技术与无人机技术相结合用于治理开放性粉尘,使用Fluent对粉尘的扩散模型进行数值模拟,分析其扩散规律,将静电喷雾装置搭载于无人机上,再模拟无人机静电喷雾在不同自然界的风速、湿度条件下对喷雾降尘效率的影响。
1 无人机静电喷雾模型建立
1.1 边界条件的确定
在湖北省武汉市某地化工厂内取一40m×40m监测区,监测区中央有一土堆,大小4m×4m×0.5m。郭配山通过研究尘源控制方法[11],进行了实验测试与数值模拟,确定了土堆表面以0.5m/s的扩散速度向外扩散。建立CFD模型如图1所示。绿色部分代表无人机,紫色部分代表土堆。经过调研,此地常年盛行南风,风力在2至3级左右,风速可达3m/s,左方边界为来风方向,设置为velocity-inlet;下方正中间空白方块为土堆模型,设置为wall;此模型用于模拟开放性粉尘的控制情况,右方及上方边界为开放边界,设置为pressure-outlet。无人机中间为水箱,两端是其旋翼,在提供自身升力的同时产生了向下的气流。采用局部加密的方法划分网格如图2所示。模型内部的流体设置为空气,空气温度取室外常温293K,大气压力取101325Pa。
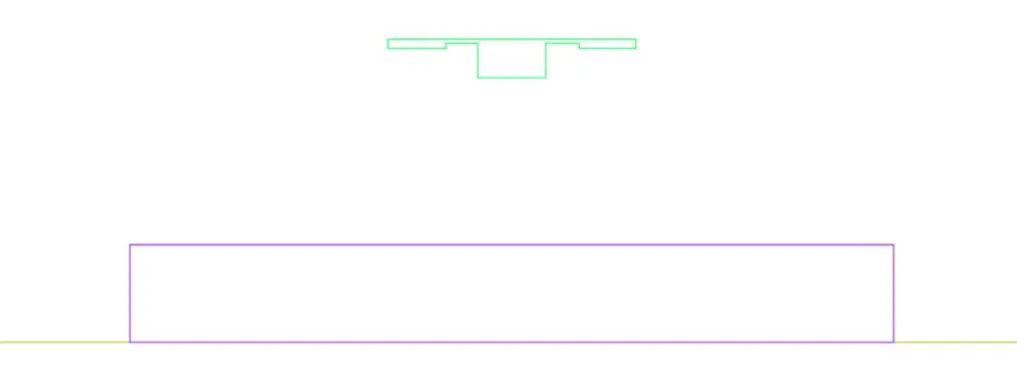
图1 CFD模型

图2 CFD模型网格划分
为确定无人机旋翼产生气流的参数,现计算单个旋翼产生的向下的风速大小,可以把螺旋桨看成是一边旋转一边前进的机翼,假定无人机处于满载状态,旋翼转速能达到7000rpm,测量得到每个旋翼螺距为22cm,计算得旋翼产生的风速为8.4m/s,设置无人机出口为velocity-inlet。
1.2 数值计算方法
CFD计算基于质量守恒、动量守恒和能量守恒等,通过数值计算的方法求解非线性联立的各类微分方程组[12],本文对粉尘浓度扩散以及无人机静电喷雾降尘的数值模拟用到以下几种微分方程:
(1)连续性方程
对于单个体积单元内流体的进入与流出引起的质量的变化,一定满足质量守恒定律,通过数学方程表现出来即为连续性方程;
(2)-方程
动量守恒定律,指作用在控制体上的合力与单位时间内通过控制面流入控制体的动量之和等于单位时间内控制体中流体动量的增量,通过这个定理可以得到-方程;
FLUENT软件提供了多种湍流模型,包括有标准-模型、RNG-模型和Realizable-模型等。本文在采用了标准-两方程模型。
假设粉尘在空气中扩散进行无规则运动,由于粉尘带有相同电荷,同性相斥,可忽略颗粒间的相互碰撞,采用拉格朗日法对气—固两相流中的粉尘颗粒进行和追踪计算。
2 粉尘扩散规律数值模拟
开放性粉尘具有不可控的特点,而且同时受到重力和浮力等多种力的作用。粉尘随风飘散,会受到风提供的动力与空气的阻力。本文假设粉尘颗粒为球形颗粒,因此作用在粉尘颗粒的作用力计算公式如下:

根据场地监测范围大小、污染物的空间分布特征、气象因素综合考虑确定,场区内外共设置3个空气采样点,即场区内设置1个空气采样点为1号,场区外设至2个空气采样点,其中在场区上主导风向设1个为2号,下主导风向设1个为3号。采用滤膜称重法进行测定采样点的风速、风向、粉尘浓度等数据,在气温20℃,湿度60%的相近天气进行监测,间断的共测试8天,每日自10点起,17点结束,间隔1h/次,共8次,取数值较为稳定的一天进行整理后得表1。

表1 粉尘浓度测试结果

续表1 粉尘浓度测试结果
测试结果分析:位于场区内的1号采样点在工作时间内含尘浓度稳定在1.7mg/m3至2.2mg/m3之间,位于上主导风向的2号采样点在工作时间内含尘浓度稳定在1mg/m3至1.5mg/m3之间,位于下主导风向的3号采样点在工作时间内含尘浓度稳定在1.7mg/m3至2mg/m3之间,3个采样点均含有较高的含尘浓度。在中午的休息时间内,没有了铲车、挖机等使用,尘源产尘较少,空气中悬浮的粉尘颗粒也有所沉降,含尘浓度较工作时间均有所降低。
现场浓度测试之后,根据测试数据建立相关模型,对土堆的粉尘模型进行数值模拟,得到自然风速分别为0m/s、1m/s、2m/s、3m/s时的速度云图与浓度云图。
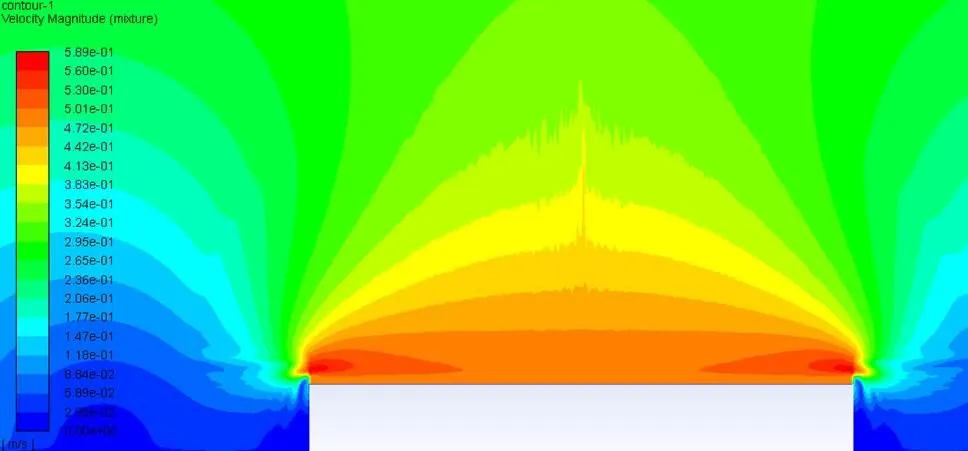
图3(a) 无风时粉尘扩散速度云图
Fig.3(a) Cloud chart of dust diffusion speed without wind
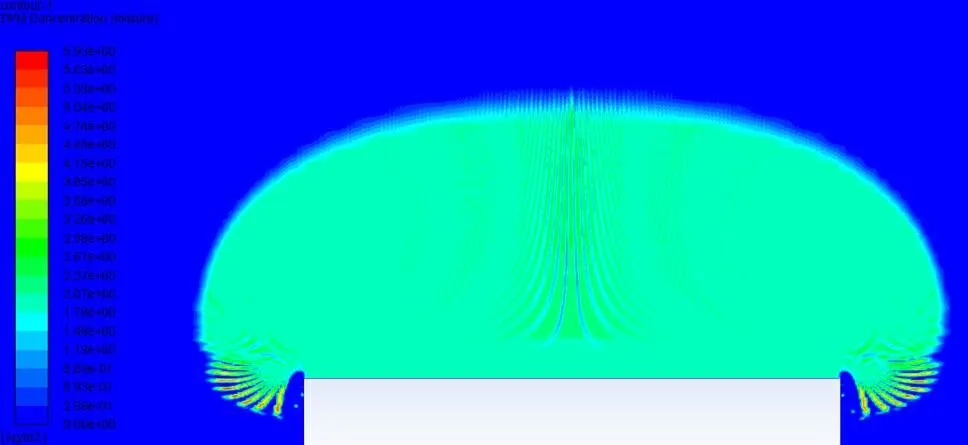
图3(b) 无风时粉尘扩散模型
Fig.3(b) Dust diffusion model without wind
当风速为1m/s,粉尘从尘源散发出来后随着左方气流向右方移动,从图4(a)可以看出,粉尘散发速度在离开尘源后与来流风速相结合,在土堆上方形成一坡面,速度可达到1.39m/s,来流风速在经过土堆后无法直线达到正右方,向右上方流动。从图4(b)可以看出,粉尘在离开土堆后,在土堆右方形成粉尘团,内部的粉尘浓度大约为2.17mg/m3,少部分区域最高能达到4.82mg/m3,随着距离的增加,粉尘浓度逐渐降低,相比风速为0m/s时的粉尘的最高浓度有所降低,但是因为左方气流的作用,粉尘团内平均含尘浓度相对增大。
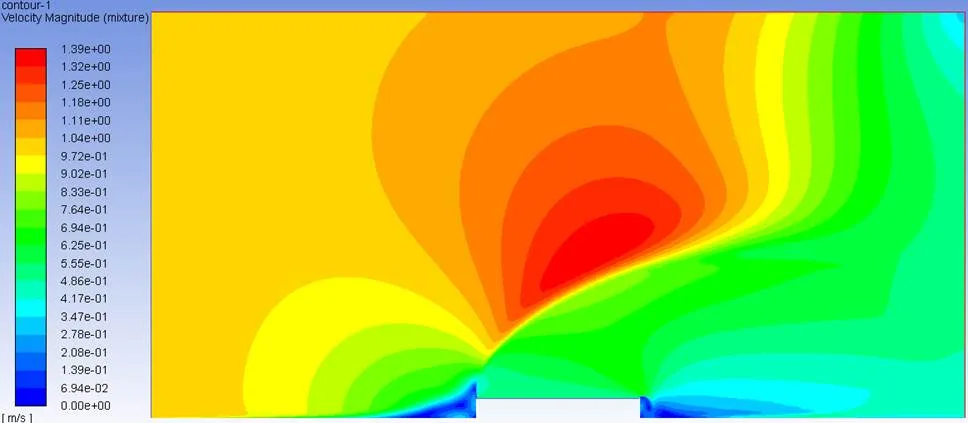
图4(a) 风速为1m/s时粉尘扩散速度云图
Fig.4(a) Cloud chart of dust diffusion velocity at 1m/s wind speed
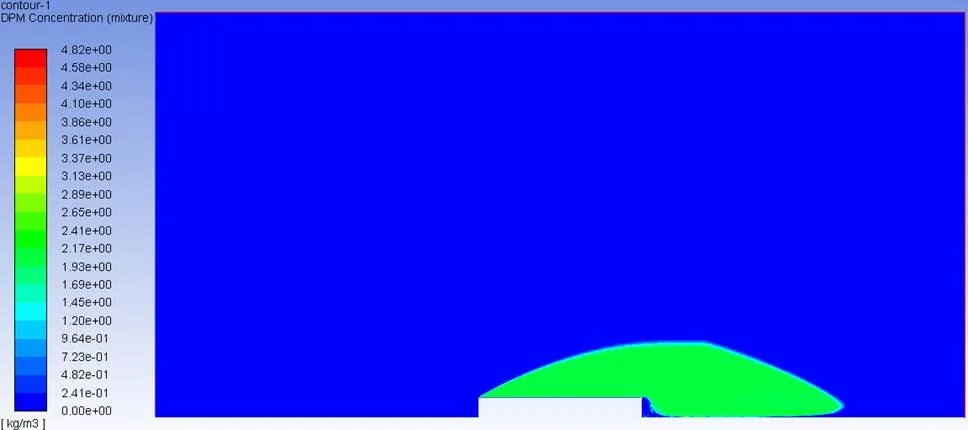
图4(b) 风速为1m/s时粉尘扩散模型
Fig.4(b) Dust diffusion model at 1m/s wind speed
当风速为2m/s,粉尘从尘源散发出来后随着左方气流向右方移动,从图5(a)可以看出,粉尘散发速度在离开尘源后与来流风速相结合,速度可达到2.2m/s,来流风速在经过土堆后无法直线达到正右方,由于土堆与地面的高度差,在土堆右方形成较小涡流更过粉尘汇聚于此。从图5(b)可以看出,在土堆右方形成粉尘团,内部的粉尘浓度大约为2.44mg/m3,少部分区域最高能达到5.42mg/m3,随着距离的增加,粉尘浓度逐渐降低,相比风速为1m/s的粉尘的最高浓度增加,但是涡流的作用,粉尘团内平均含尘浓度相对增大。

图5(a) 风速为2m/s时粉尘扩散速度云图
Fig.5(a) Cloud chart of dust diffusion velocity at 2m/s wind speed
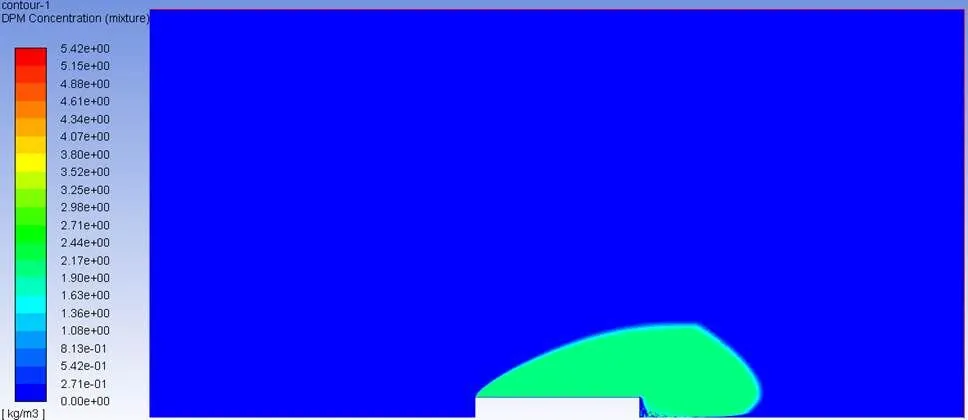
图5(b) 风速为2m/s时粉尘扩散模型
Fig.5(b) Dust diffusion model at 2m/s wind speed
当风速为3m/s,大部分粉尘随着左方气流向右方移动,从图6(a)可以看出,最高速度可达到3.54m/s,这几个风速下,土堆附近的气流组织均较混乱,容易加剧粉尘的扩散。从图6(b)可以看出,在土堆右方形成的粉尘团,在风速的作用下更加的低矮,内部的粉尘浓度大约为1.90mg/m3,少部分区域最高能达到4.21mg/m3,随着距离的增加,粉尘浓度逐渐降低。

图6(a) 风速为3m/s时粉尘扩散速度云图
Fig.6(a) Cloud chart of dust diffusion velocity at 3m/s wind speed
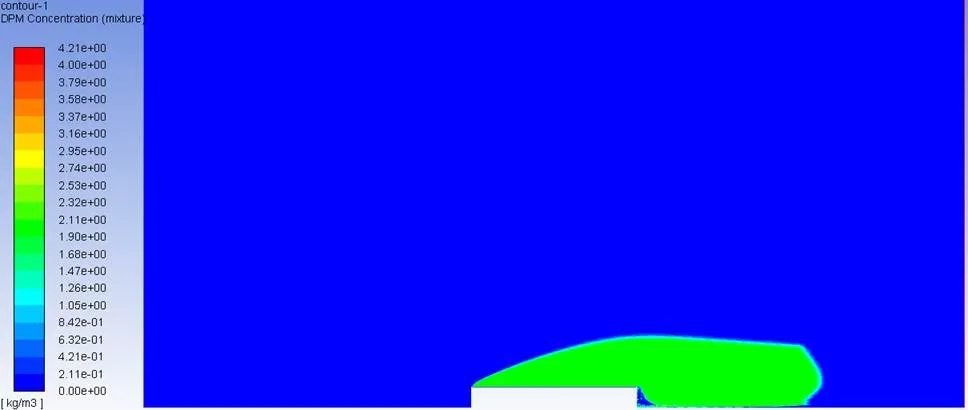
图6(b) 风速为3m/s时粉尘扩散模型
Fig.6(b) Dust diffusion model at 3m/s wind speed
3 无人机静电喷雾数值模拟
3.1 不同自然条件下数值模拟
项目施工并不会因为天气的原因而有所改变,土堆的产尘也会随之进行,因此,本文将无人机工作高度设置为7m,喷雾压力设置为0.2MPa,模拟了无人机静电喷雾在不同自然条件下的降尘效果。此模拟有两个变量:风速和湿度。
由于此地常年盛行南风,风速0至3级不等,土堆向四周进行扩散粉尘,此模型为2D模型,固定一方为来风方向即南风。设置4种工况进行对比研究,分别是风速为0m/s、1m/s、2m/s、3m/s。
湿度对喷雾降尘的影响也比较大,晴天天气较干燥,空气相对湿度在40%左右浮动;阴天较为潮湿,空气相对湿度在70%左右浮动;雨天湿度最大,但是雨天无需使用无人机静电喷雾便能达到一定的降尘效果,故不考虑。设置2种工况进行对比研究,分别是空气相对湿度为40%与70%。
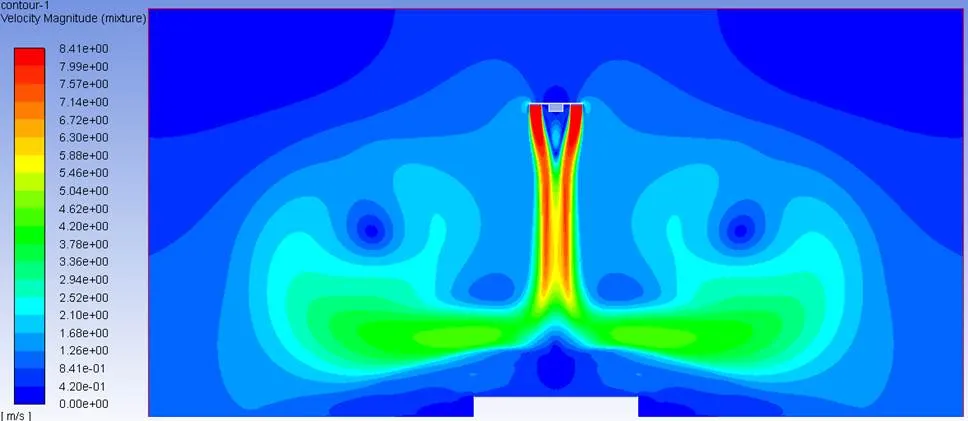
图7(a) 无人机在=0m/s时的速度云图
Fig.7(a) Velocity cloud chart of UAV at=0m/s
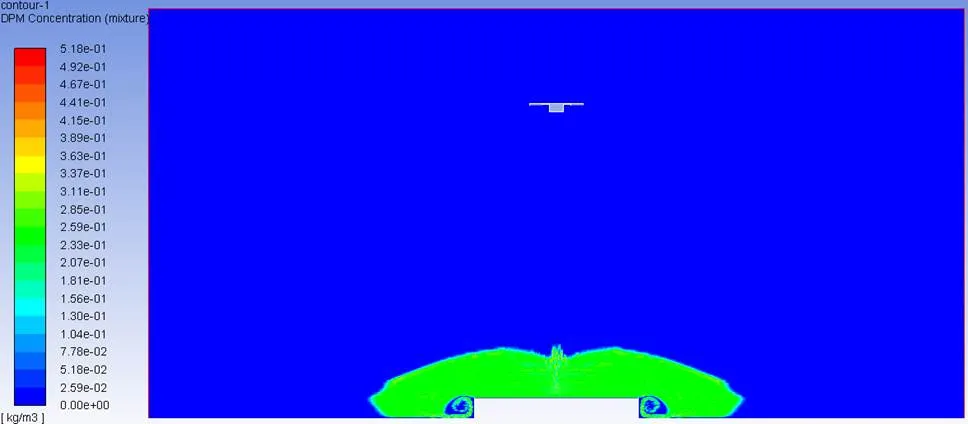
图7(b) 无人机在=40%时的浓度云图
Fig.7(b) Concentration nephogram of UAV at=40%
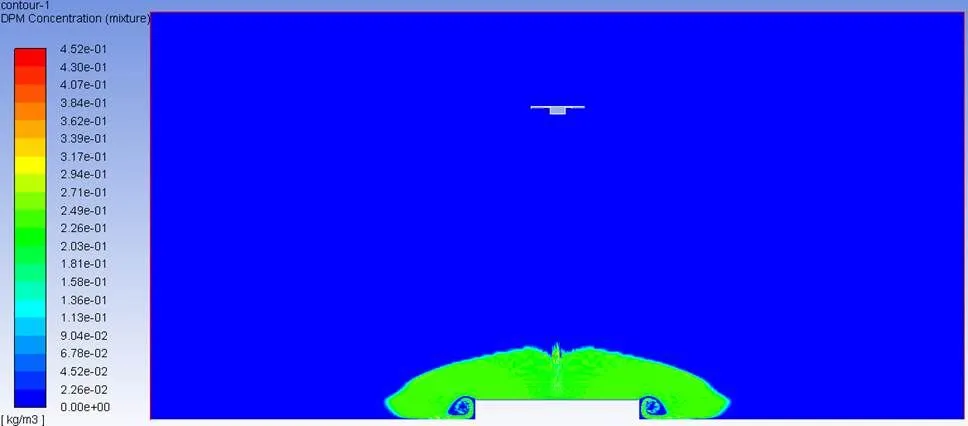
图7(c) 无人机在=70%时的浓度云图
Fig.7(c) Concentration nephogram of UAV at=70%
当自然风速为0m/s时(图7(a)),无人机产生的气流能有效将粉尘控制在一定范围,分析图7(b),(c)可知,当空气相对湿度从40%升至70%,也就是晴天转为阴天,尘源散布的粉尘有一定的减少,形成的粉尘团相对较小,但是差别不大,粉尘的扩散能力也相对减弱,空气中的最高粉尘浓度从0.518mg/m3降低至0.452mg/m3。
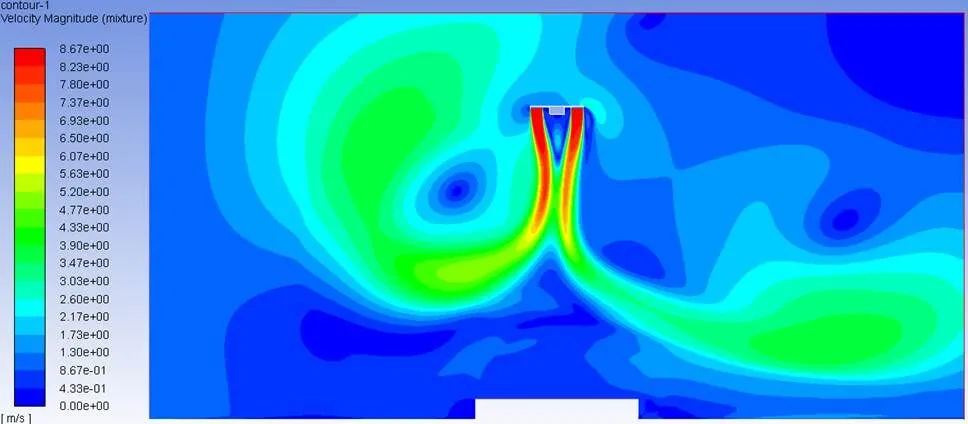
图8(a) 无人机在=1m/s时的速度云图
Fig.8(a) Velocity cloud chart of UAV at=1m/s
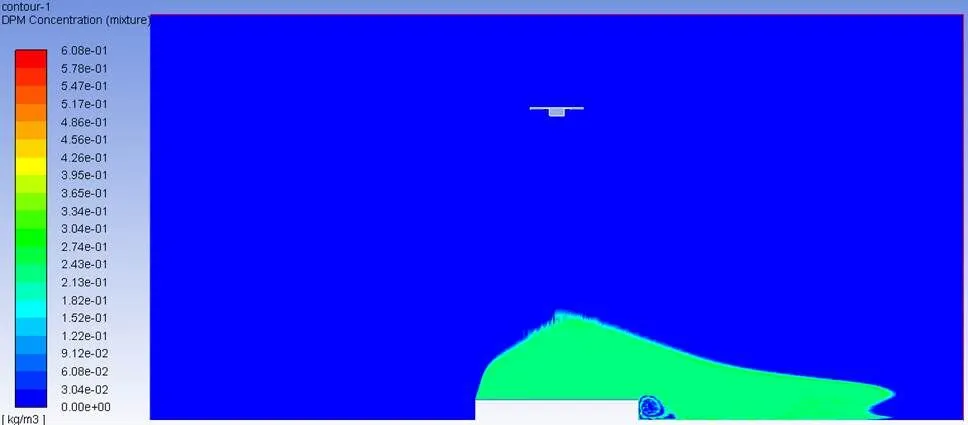
图8(b) 无人机在=40%时的浓度云图
Fig.8(b) Concentration nephogram of UAV at=40%

图8(c) 无人机在=70%时的浓度云图
Fig.8(c) Concentration nephogram of UAV at=70%
当自然风速增大至1m/s,自然风对无人机旋翼气流产生影响,分析图8(a),自然气流对无人机旋翼气流影响较小,部分旋翼气流仍然能够到达土堆附近,无人机来风方向的旋翼气流与自然气流相结合,在左方形成向上旋转的涡流,使得土堆左方的粉尘完全受自然气流的影响向右扩散,粉尘在遇到无人机影响较小的旋翼气流时仍然受旋翼气流控制,向上扩散时被抑制,形成一下降的坡面。通过分析图8(b),(c),当空气相对湿度从40%上升至70%时,雾滴的蒸发作用相对减弱,雾滴数量减少量降低,降尘效果有所提高,粉尘扩散模型有些许减小,粉尘浓度最高值也从0.608mg/m3下降至0.507mg/m3。
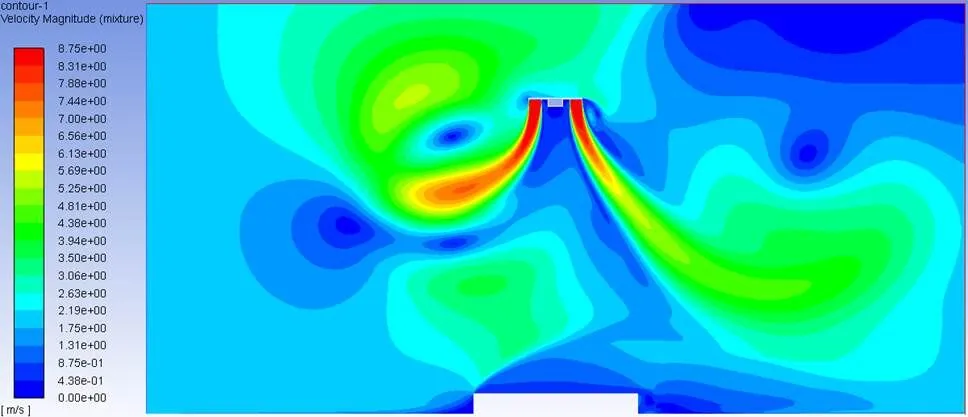
图9(a) 无人机在=2m/s时的速度云图
Fig.9(a) Velocity cloud chart of UAV at=2m/s

图9(b) 无人机在=40%时的浓度云图
Fig.9(b) Concentration nephogram of UAV at=40%
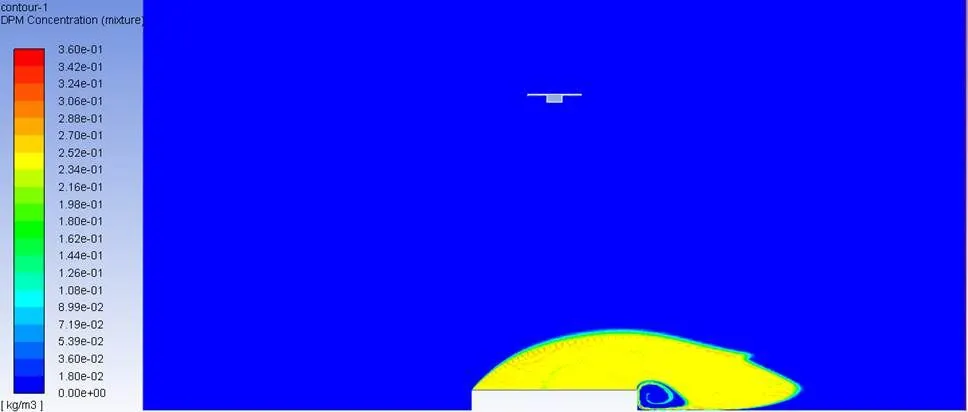
图9(c) 无人机在=70%时的浓度云图
Fig.9(c) Concentration nephogram of UAV at=70%
当自然界风速增大至2m/s时,分析图9(a)得知,旋翼产生气流的因自然界风速的变化更加剧烈,但还是在无人机来风方向形成较小漩涡,旋翼产生气流对粉尘的控制能力有所减弱,粉尘向上扩散时受到自然界风速的影响加大,扩散模型逐渐扁平化。分析图9(b),(c)得知,随着湿度的增加,粉尘扩散范围略有减小,形成粉尘团内平均浓度从0.24mg/m3下降至0.234mg/m3,下降幅度较小,最高粉尘浓度从0.437mg/m3下降至0.36mg/m3。
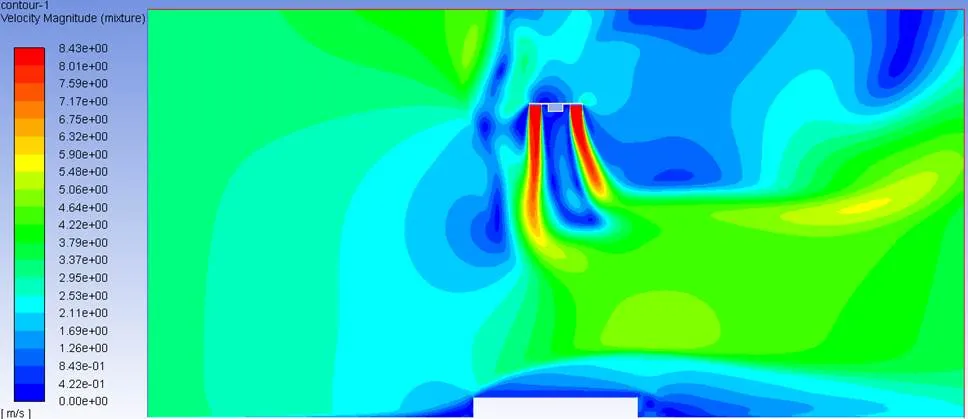
图10(a) 无人机在=3m/s时的速度云图
Fig.10(a) Velocity cloud chart of UAV at=3m/s
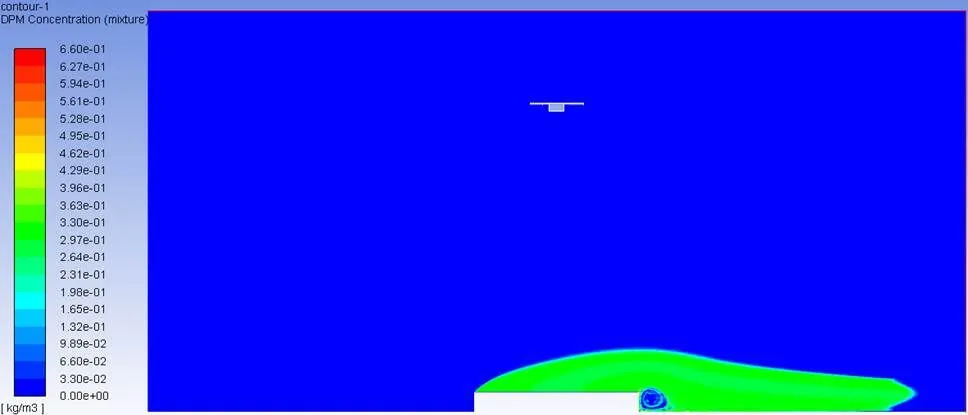
图10(b) 无人机在=40%时的浓度云图
Fig.10(b) Concentration nephogram of UAV at=40%
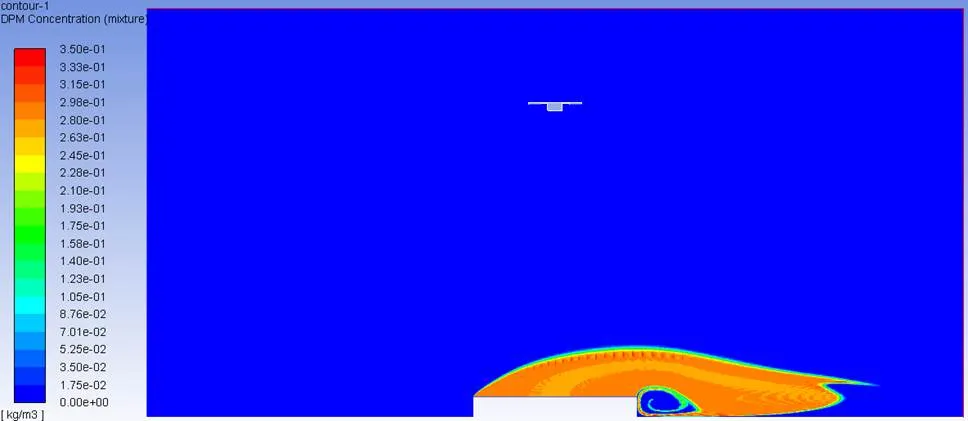
图10(c) 无人机在=70%时的浓度云图
Fig.10(c) Concentration nephogram of UAV at=70%
当自然界风速增加至3m/s,分析图10(a)得知,旋翼产生气流随着自然界风速向右方流动,受自然界风速的影响最大,在土堆右上方区域里,风速可达到5.48m/s。分析图10(b),(c)得知,因受自然气流的影响较大,粉尘的扩散模型更加扁平化,更对的粉尘被带到了里土堆较远的地方,随着湿度的增大,形成粉尘团内的粉尘浓度从0.33mg/m3下降至0.28mg/m3,降尘效果有些许改善,扩散范围有所减小。
3.2 计算结果分析
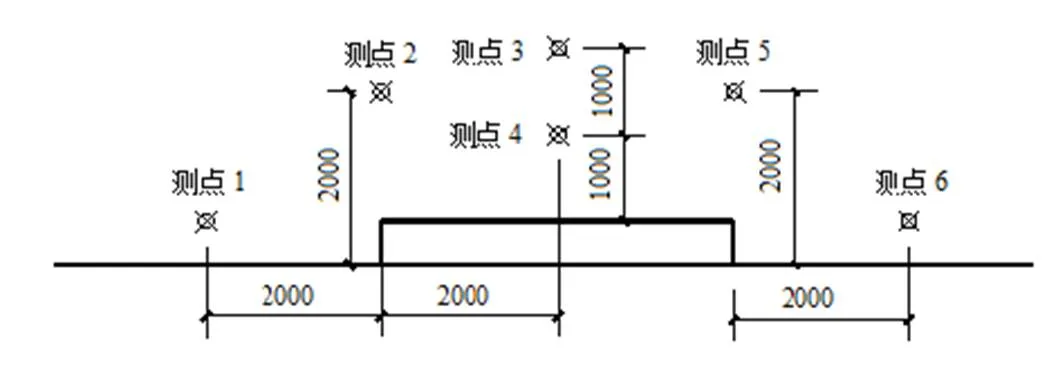
图11 测点布置图
在模型四周设立6个测点,统计测各点浓度的变化以计算降尘效率。测点布置图如图11。其中,测点1与测点2位于土堆来风方向,测点3与测点4位于土堆中央正上方,测点5与测点6位于土堆下风方向。

表2 监测点浓度值及降尘效率
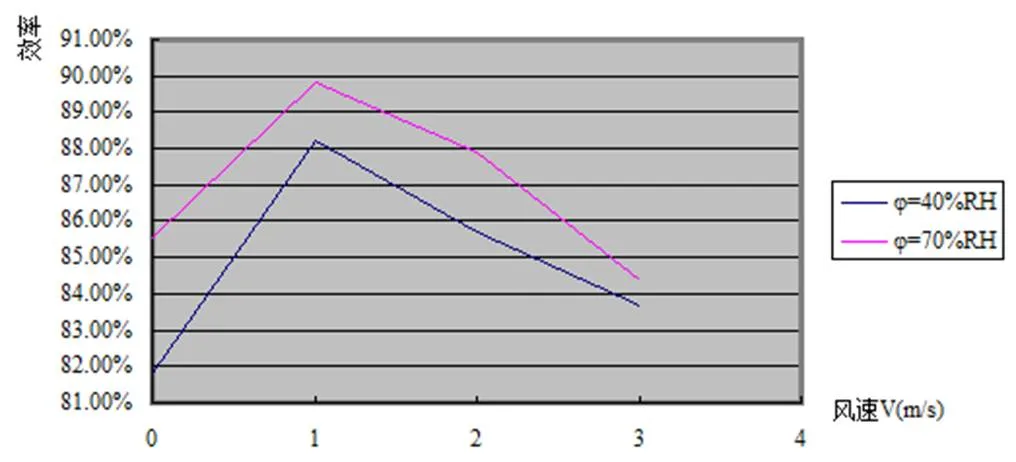
图12 平均降尘效率
统计各测点喷雾前后的浓度值并计算喷雾的降尘效率,结果如表2,计算6测点在不同自然条件的平均降尘效率,结果如图12所示。从结果可以看出以下几点:
(1)静电喷雾数值模拟降尘效率普遍较高,最低75.57%,最高95.93%,平均降尘效率达到了85.87%。
(2)无风时平均降尘效率最低,风速增大至1m/s时,自然界风速与旋翼产生气流能较好的结合起来,平均降尘效率达到最高;风速进一步增大时,粉尘受到自然风的影响增大,一部分粉尘随着气流流走,导致降尘效率降低。
(3)在风速不变的情况下,湿度增大,空气中的粉尘浓度减小,降尘效率有所提高,但是提高幅度较小,随着空气流速的增大,粉尘随气流进行扩散,降尘效率提高幅度也逐渐减小。
4 结论
本文通过现场测定的浓度值,使用FLUENT软件建立了准确的粉尘扩散模型,使用FLUENT软件建立了无人机静电喷雾模型进行降尘数值模拟,模拟计算得到无人机工作在高7m、喷雾压力为0.2MPa时,无人机静电喷雾的平均降尘效率能达到85.87%,自然风速在1m/s左右时能达到较高的降尘效率,湿度较大的天气降尘效率较高。
[1] Law S E. Agricultural electrostatic spray application: a review of significant research and development during the 20th century[J]. Journal of Electrostatics, 2001,51- 52(none):25-42.
[2] 周新建,陈海安,李勇刚.静电作用下喷雾降尘效率的研究[J].矿山机械,2010,(10):61-63.
[3] Carlton J B, Bouse L F. Electrostatic Spinner-Nozzle for Charging Aerial Sprays[J]. Transactions of the ASAE, 1980,23(6):1369-1373.
[4] Inculet I I, Fischer J K. Electrostatic aerial spraying[J]. IEEE Transactions on Industry Applications, 1989, 25(3):558-562.
[5] Carlton J B. Technique to reduce chemical usage and concomitant drift from aerial sprays[J]. United States Department of Agriculture Patents, 1999.
[6] 金兰,茹煜.基于无人直升机的航空静电喷雾系统研究[J].农机化研究,2016(3):227-230.
[7] 张亚莉,兰玉彬,Fritz B K,等.美国航空静电喷雾系统的发展历史与中国应用现状[J].农业工程学报,2016, 32(10):1-7.
[8] 刘武兰,周志艳,陈盛德,等.航空静电喷雾技术现状及其在植保无人机中应用的思考[J].农业工程学报,2018, (5):1-9.
[9] 蔡彦伦,邱白晶,沈伟.无人机低空静电喷雾效果研究[J].农机化研究,2018,(8):188-192.
[10] 茹煜,金兰,贾志成,等.无人机静电喷雾系统设计及试验[J].农业工程学报,2015,31(8):42-47.
[11] 郭配山.大尺度阵发性尘源控制的气流组织实验及模拟研究[D].东华大学,2008.
[12] 张克鹏.某地铁空调冷凝机组CFD仿真与试验验证[J].制冷与空调,2019,(10):45-49.
Numerical Simulation for UAV Electrostatic Spray Technology Treating Open Dust
Gao Chunxue1Yang Shu1Wu Songlin1Liu Qiuxin1,2
( 1.Wuhan University of Science and Technology, Wuhan, 430065;2.City college, Wuhan university of science and technology, Wuhan, 430083 )
Electrostatic spray technique combined with UAV technology was used to treat open dust, and the diffusion model of dust was numerically simulated with Fluent in this paper. The simulation shows that the airflow generated by the rotor of the UAV at 7m height and under the spray pressure of 0.2MPa, the average dust reduction efficiency of the electrostatic spray of the drone can reach 85.87%. When the natural wind speed is 1m/s, and the relative humidity of the air is 70%, the dust reduction efficiency in the local area reach up to 95.93%.The drone electrostatic spray control open dust technology proposed in this paper has good dust-reducing effect and is of great significance to the development of heavy metal pollution dust technology.
Open dust; Fluent; Electrostatic spray; UAV; Numerical simulation
X513
A
1671-6612(2021)01-018-09
湖北省教育厅教研项目:基于Web-App的土木类专业实践教学质量控制研究(2015225);湖北省高等学校实验室研究项目:基于可再生能源的智能化环境控制实验室的建设研究(HBSY 2019-04)
高春雪(1967.3-),女,本科,实验师,E-mail:575882723@qq.com
2020-04-16
猜你喜欢
环境保护科学(2022年4期)2022-09-02
导航定位学报(2022年4期)2022-08-15
大自然探索(2021年2期)2021-04-02
数学大王·低年级(2021年5期)2021-01-13
山西文学(2019年8期)2019-11-01
江南诗(2019年4期)2019-08-30
科技与创新(2016年11期)2016-06-28
科技视界(2016年13期)2016-06-13
智能制造(2015年9期)2015-10-15
小天使·四年级语数英综合(2015年3期)2015-04-20
