
具备电压补偿功能的不停电过分相系统及控制方法
2021-03-16 08:36:40袁佳歆肖非然闵永智
电工技术学报 2021年5期
袁佳歆 倪 周 肖非然 闵永智
(1. 武汉大学电气与自动化学院 武汉 430072 2. 兰州交通大学自动化与电气工程学院 兰州 730070)
0 引言
由于高铁机车为单相负荷,牵引变压器一般采用轮流换相的连接方式缓解牵引供电系统对电网造成的不平衡问题。然而,牵引变电所之间采用相序轮换会使两个相邻供电臂之间存在很大的电压相位差。若两者直接相连,将引起短路现象导致牵引网和受电弓熔断等危害,因此两个供电臂之间设置一个电分相区。
目前,国内外关于机车通电分相区的方案主要为断电过分相与不停电过分相两种方式。断电过分相的方式虽然具有方案简单和造价低等优点,但是会给牵引网和机车带来过电压与过电流的冲击,且列车速度受到损失[1]。不停电过分相方式主要可分为机械开关地面自动过分相、电力电子开关自动过分相与柔性地面自动过分相三种方式[2]。机械开关过分相的方式是利用真空开关的快速投切,从而实现列车的不停电过分相,但是存在真空开关动作次数有限、失电时间相对较长和在投切过程中仍会有过电压与过电流[3]等问题。电力电子开关自动过分相具有响应速度快和分合闸时间可控的特点[4-5],能有效降低开关的失电时间至 5ms[4],但不能解决过电压和过电流问题。柔性地面自动过分相系统是基于大功率电力电子器件构成的电能变换装置实现能量从供电臂向分相区的转移[6-8],并且在分相区供电时平滑改变输出电压的相位,不会出现突变,避免了过电压和过电流。例如文献[7]提出了基于背靠背逆变器的过分相装置,该方案虽能够实现机车不停电过分相,但需要额外增设高压大容量变压器,导致安装空间较大[8],另外未考虑机车在过分相过程中负荷的变化特性以及引起的电压波动问题。
文献[9-10]提出了一种基于两相式模块化多电平变换器(Modular Multilevel Converter, MMC)拓扑不停电过分相装置及其控制策略,无需通过高压大容量变压器接入电网,并且输出电压波形质量较好。由于两相式MMC拓扑只从一侧牵引线路取电供给分相区,导致供电容错性低,另外当机车进出分相区时,还是会有负荷突变,导致牵引线路末端电压波动较大。
为进一步提高不停电过分相系统的可靠性和改善牵引供电网末端电压波动,本文提出了一种基于三相MMC的分相区不停电过分相系统及其控制策略。该方法可保证机车不停电通过分相区且负荷线性变化。本文研究了电压暂降的变化特点,介绍了不停电过分相系统(Uninterrupted Power Transfer,UPT)的原理及相应的拓扑结构,分析了UPT的电流传输特性,提出了基于不同状况下UPT的控制策略,并通过仿真算例和小容量的实验验证了本文所提出拓扑及控制策略的可行性和有效性。
1 UPT的拓扑结构及补偿原理
1.1 UPT的拓扑结构
在牵引供电系统中,一次侧三相电压经过牵引变压器会转变为供电臂的两相电压。为了避免相邻两供电臂的直接相连而导致短路事故的发生,在两供电臂之间存在一个不带电的电分相环节,主要利用空气绝缘锚段来隔绝相邻供电臂的电气连接。当机车过分相时,受电弓直接连在不带电的中性段上,会依靠惯性惰行通过分相区。
不断电过分相装置 UPT拓扑结构示意如图 1所示。补偿装置采用三相MMC结构[11-12],包括六个桥臂和一条直流支撑电容支路,每个桥臂由N个子模块及一个电感串联而成。其中,每个子模块可以看成是一个半桥型的DC-AC变换器,采用三相MMC可以省去变压器的成本及安装空间[13]。、分别为三相电网的相电流,Iα和Iβ分别为两个供电臂的负载电流,iu、iv和iw分别为三相变换器的输出电流。
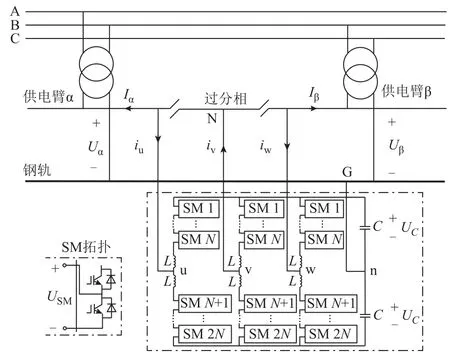
图1 UPT拓扑结构示意图Fig. 1 The topology diagram of the UPT

在列车移相过程中,分相区电压为
因此,在整个机车运行的过程中,分相区上的电压幅值不变,实现了相角由α侧供电臂上-30°至β侧供电臂上-90°的变化。
普通列车组采用的是单弓过分相方式,而重联动车组是双弓过分相方式。一般中性段长度为400~800m,由于要考虑双弓过分相,因此允许重联机车组运行的中性段区间至少要600m。为了保证双弓重联机车实现不断电过分相,本文提出如下双弓过分相方法:首先,当机车接近和进入分相区时,不停电过分相系统在分相区中性段发出与来车侧同幅值和相位的电压;其次,当两个受电弓完全进入分相区后,不停电过分相系统开始平滑调节输出电压的相位直至与另一个供电臂的相位相同;最后,当机车完全离开分相区后,不停电过分相系统停止工作。
1.2 UPT装置原理分析

图2 UPT等效电路Fig.2 Equivalent circuit of UPT
UPT等效电路如图2所示。在不影响分析结论的情况下,对电路模型进行简化分析。假设公共侧直流母线电压恒定且上桥臂和下桥臂电容电压相等,主网侧电流在上桥臂和下桥臂中平均分配,主电路中的元件均为无损耗的理想元件。
对于三相中性点,根据基尔霍夫第一定律可以得到
假设两侧供电臂向分相区传送的总功率为P,且供电臂α传送的功率为P1=kP,则供电臂β传送的功率为P2=(1-k)P,考虑机车在t0时刻由供电臂α进入分相区,则有
此时有
三相环流可分别表示为
结合式(4)~式(6)可知,三相MMC上、下桥臂电流为

通过式(7)、式(8)可知,当保持两侧供电臂向分相区传送的总有功功率与 MMC模块直流侧电压比值一定时,u相的上下桥臂上的电流与供电臂α侧电流成正比,与时间成反比;w相的上、下桥臂上的电流与供电臂β侧电流成正比,与时间成正比;v相的上、下桥臂上的电流与两侧供电臂电流之和成正比。由此可知,为了保证列车在经过分相区时负荷线性变化,应保证两供电臂的电流之和连续变化。
2 UPT无功补偿分析
2.1 牵引网末端电压波动分析
在机车从分相区进入供电臂的瞬间,可将其看成冲击性的大功率阻感负荷瞬间突然接入电网,将引起系统末端电压的暂降[14]。
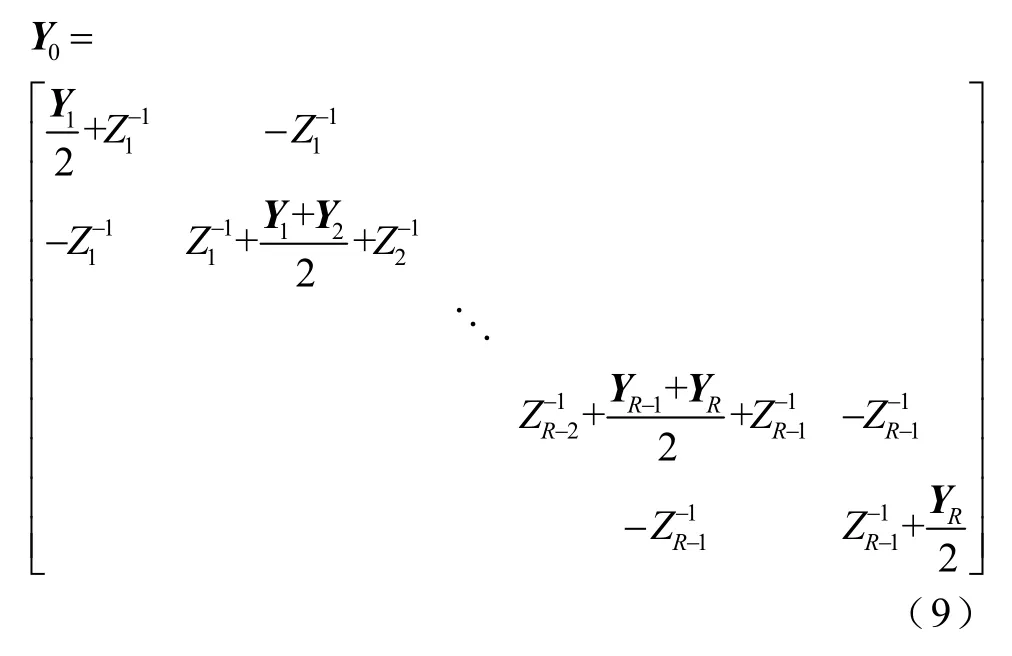
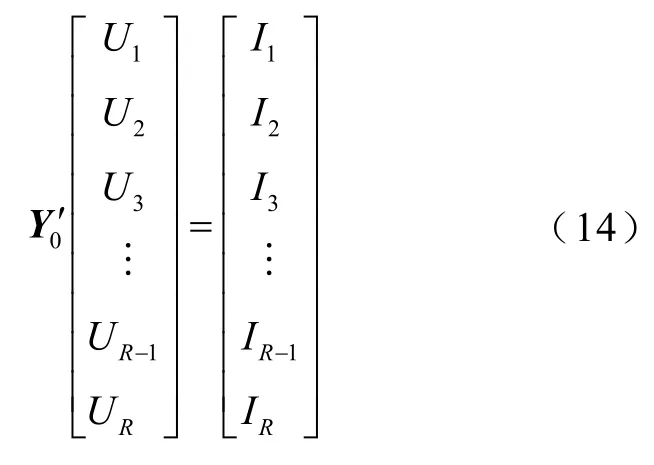
由于考虑上下行全并联的牵引网系统中包括多条平行的线路,为了保证其完整的电气分布特性,考虑对牵引网进行R次切割,从而建立如图3所示的牵引网的链式电路模型。
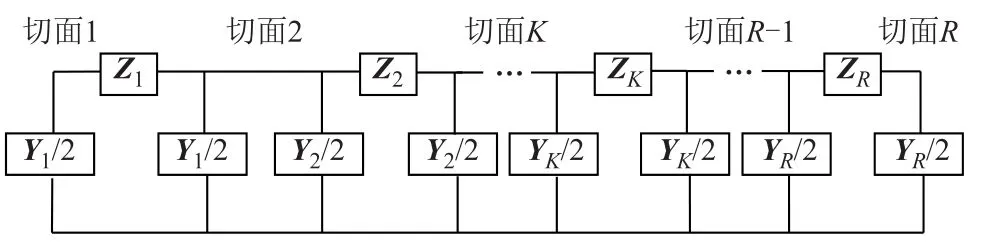
图3 牵引网链式结构切面图Fig.3 Sectional drawing of chain structure of traction network
由图3可知,系统节点导纳矩阵Y0为
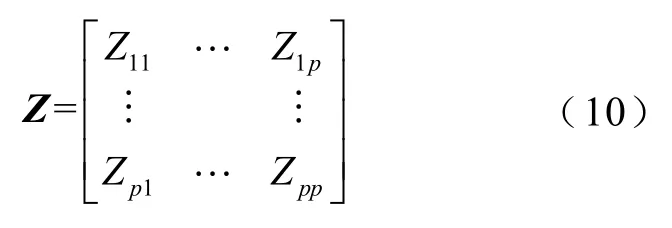
假设牵引网导线数量为p,建立如图 4所示的π型p导体线路。根据电磁场理论可以得到π型p导体线路的分布阻抗矩阵Z为
此时π型p导体线路的节点导纳矩阵Y/2为
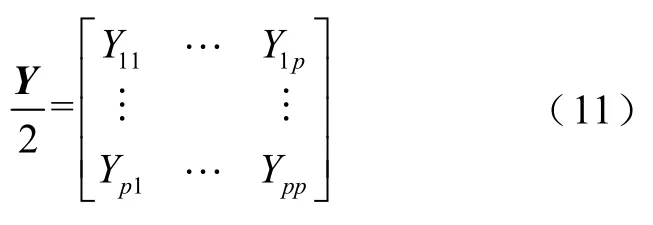
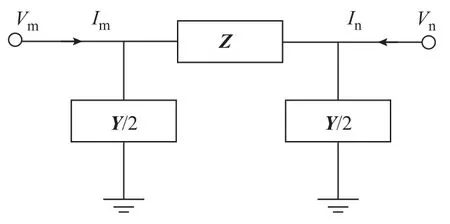
图4 π型p导体线路Fig.4 π-type p-conductor lines
由于机车是并联接入牵引网中,故机车的接入对分布阻抗矩阵没有影响,但是会引起一边的节点导纳矩阵的变化。考虑一辆机车分别接在i、j两条线路上,其导纳为yij,且运行于切面K,此时π型p线路的节点导纳矩阵的修改增量为

此时机车的导纳将引起系统节点导纳矩阵中YK矩阵的变化。同理,考虑有q辆机车在电路中运行,由于电路的线性化,可直接用叠加定理进行计算分析,即机车的接入对系统等效节点导纳矩阵的影响同样将分别体现在所接线路与所在切面上,而并不会影响系统的分布阻抗矩阵。
假设切面电流为I,节点电压为U,考虑加入机车之后的系统节点导纳矩阵为0′Y,建立整个系统的节点电压方程为
经过计算分析可知,机车在进入供电臂的瞬间,将引起牵引网末端电压下降。当机车在牵引网中不断运行时,其电压会有一定的抬升。在考虑上、下行线上各有三辆机车满额工作的极限情况下,末端电压下降比较大。
2.2 电流无功分量分析
由于供电臂之间的分相区距离较短,忽略其阻抗。机车在从分相区进入供电臂的过程中,考虑利用过分相装置发出无功功率从而维持末端电压的稳定。此时电压损耗满足
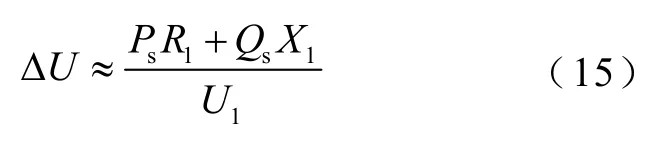
其中,首端的有功功率Ps和无功功率Qs分别满足
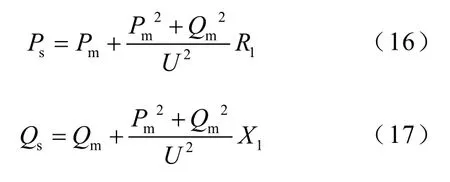
式中,Pm、Qm分别为高铁机车的有功功率与无功功率。
若要完全补偿这部分电压损耗,过分相装置所发出的无功功率需满足
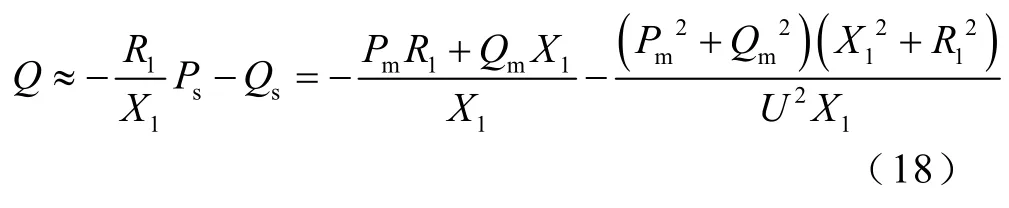
无功电流满足
3 有功电流传输特性分析
相邻两牵引变电站采用轮流换相的方式接入电网。牵引变压器为高速铁路常用的Vx牵引变压器,为2×27.5 kV牵引供电方式,其结构简单且相对于其他类型的牵引变压器利用率较高。两牵引变电站之间通过分相区进行隔离。
不停电过分相装置原理图如图5所示。假设分相区从α侧供电臂吸收的有功电流为,从β侧供电臂吸收的有功电流为,在t0时刻机车由α侧供电臂恰好驶入分相区,机车过分相的总耗时为T。为了保证机车在通过分相区时负荷特性的线性平滑调节,分相区从两侧供电臂单位时间内吸收的电流变化特性如图6所示。对机车从α侧供电臂驶向β侧供电臂,经过分相区的整个过程的有功电流传输过程进行分析。
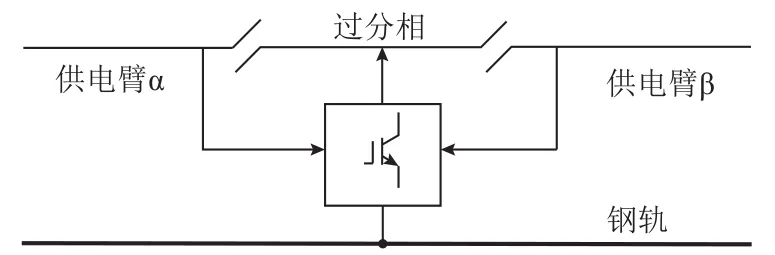
图5 不停电过分相装置原理图Fig.5 Schematic diagram of the uninterrupted phaseseparation passing device

图6 机车过分相的负荷有功电流特性曲线Fig.6 Load active current characteristic curve of locomotive phase-separation passing
供电臂α向分相区传输的有功电流满足
供电臂α向分相区传输的有功电流曲线如图 7所示。
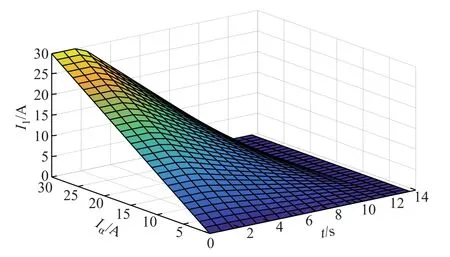
图7 供电臂α向分相区传输的有功电流曲线Fig.7 Active current curve of power supply from arm α to neutral section
供电臂β向分相区传输的有功电流满足

供电臂 β向分相区传输的有功电流曲线如图 8所示。
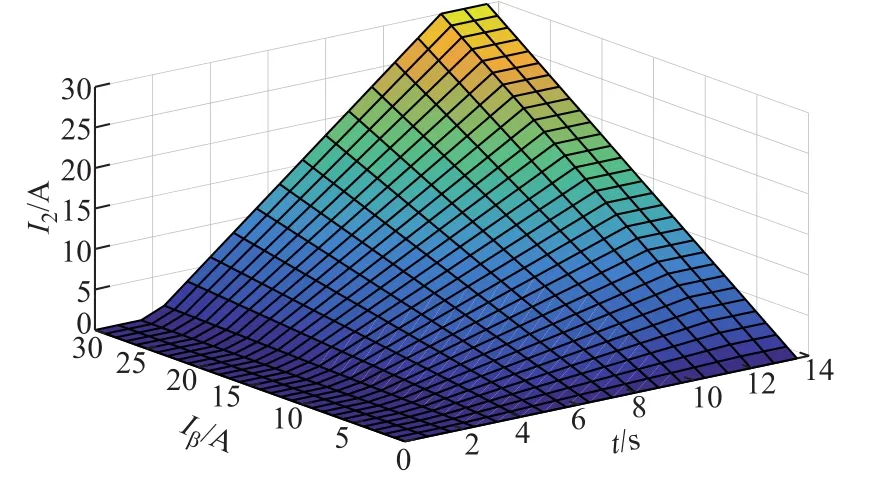
图8 供电臂β向分相区传输的有功电流曲线Fig. 8 Active current curve of power supply from arm β to neutral section
假设过分相装置的三个端口中,A端口与α侧供电臂相连,B端口与β侧供电臂相连,C端口与分相区相连,三个端口输出的有功电流分别为则传递的电流满足表1。
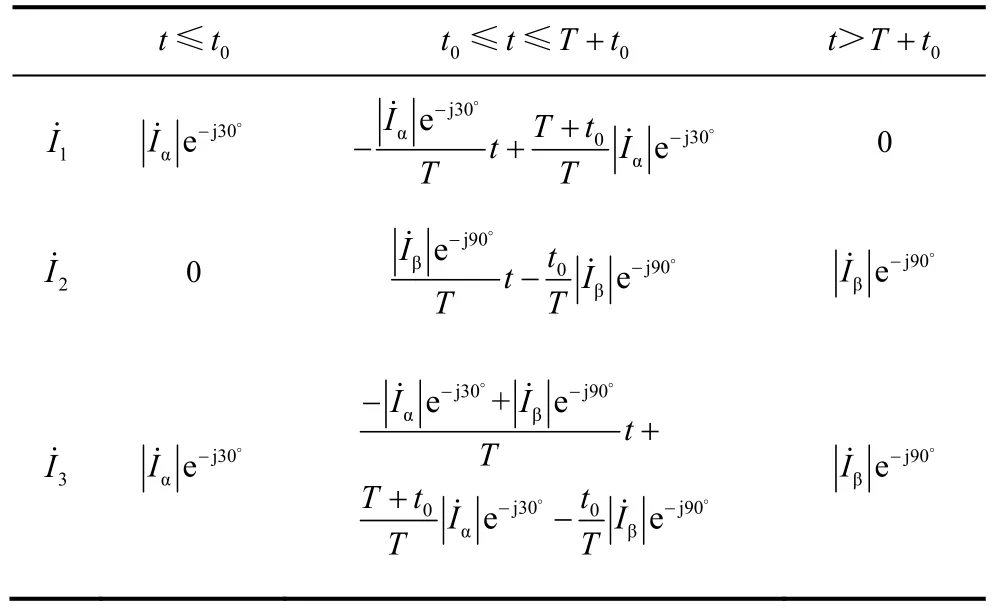
表1 过分相装置各端口输出有功电流Tab.1 Output active current of each port of the phaseseparation passing device
在机车通过分相区的过程中,α侧供电臂上的有功电流线性减小,β侧供电臂上的有功电流线性增大。当供电臂上传输的有功电流一定时,分相区上吸收的电流总和保持不变,使得机车能在不停电惰行的条件下,通过分相区无速度损失。
4 控制策略
UPT的控制策略框图如图9所示。考虑列车从α侧供电臂驶向β侧供电臂,经过分相区的整个过程,通过三相 MMC的 u、v、w三相与中性点配合,可实现分相控制[15-16],在列车由α侧供电臂经过分相区通往β侧供电臂的整个过程中,u相逆变器与 w相逆变器均控制交流电流,分别吸收 α侧供电臂和β侧供电臂的有功功率,且将其转移至v相变流器。v相变流器根据电压的移相特性输出基波电压与电流,并为在分相区中运行的机车提供功率。u相逆变器吸收并转移至 v相变流器的有功功率线性减小,w相逆变器吸收并转移至 v相变流器的有功功率线性增加,而两者之和维持一定。在机车从分相区驶向供电臂的时候,通过变流器发出无功电流维持机车电压的稳定不变,其控制策略框图如图10和图11所示。
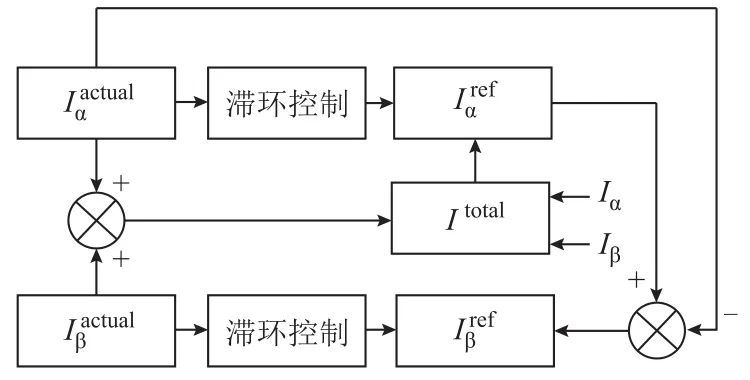
图9 UPT控制策略框图Fig.9 Block diagram of UPT control strategy
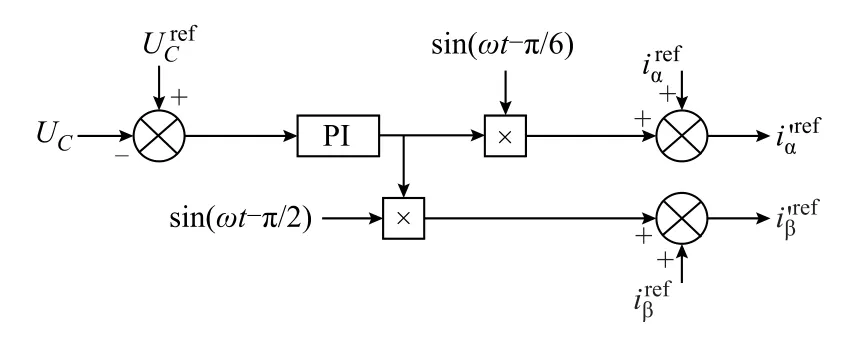
图10 实际参考电流信号生成框图Fig.10 Actual reference current signal block diagram
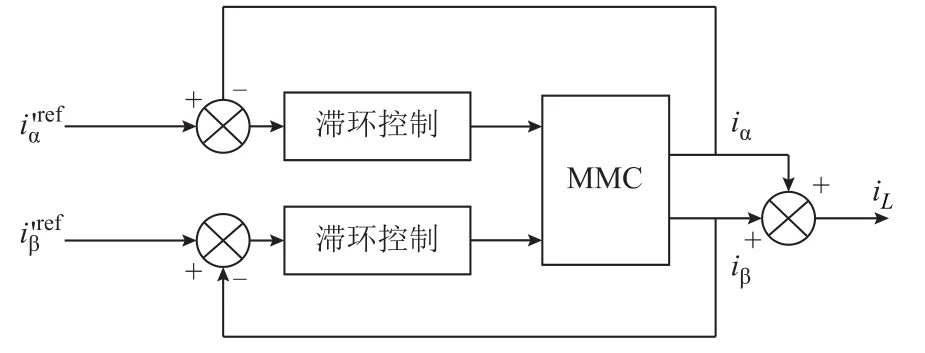
图11 UPT控制系统框图Fig.11 UPT control system
在机车过分相的过程中,UPT应该满足两个目标[16-17]:①机车通过分相区的过程中,从两侧供电臂吸收的有功电流均线性变化,且总和保持一定;②在机车过分相时,机车电压幅值保持一定,相位发生移相变化。
4.1 有功控制策略
机车在过分相的过程中从两侧供电臂吸收的有功电流总和保持一定,α侧供电臂输出的有功电流线性减小,而β侧供电臂输出的有功电流线性增加。利用直流电压参考信号与实测信号的比较,经过PI控制器与两侧供电臂电压同步参考信号的作用[18],得到直流电压信号并将其用于供电臂电流的调节,α侧供电臂有功参考电流即为α侧供电臂的输出有功电流[19-20],即

假设α侧供电臂实际输出有功电流与参考有功电流比值为μ(0<μ<1),故可得α侧供电臂实际输出有功电流表达式为
利用 β侧供电臂输出的有功电流补偿 α侧供电臂的实际输出有功电流与有功参考电流之间的差值,即
β侧供电臂输出的有功参考电流为
由式(22)~式(25)可知,系统总的传递有功电流包括α侧供电臂输出有功电流与β侧供电臂输出有功电流两部分,其中,α侧供电臂的有功参考电流为 α侧供电臂输出有功电流的理论计算值,β 侧供电臂的有功参考电流为两侧总的输出有功电流与α侧供电臂实际输出有功电流的电流差值。
4.2 无功控制策略
装置所发出的无功电流来维持机车进入供电臂时所引起的电压暂降[21-22]。机车在过分相的过程中,公共直流侧母线电压保持稳定,即通过直流电压的控制,维持机车电压的稳定。利用所得到的实际参考电压信号,对实测无功电流信号进行滞环电流跟踪控制,从而实现对参考电流信号的快速跟踪与实际输出电流信号的迅速调节。
β侧供电臂输出的无功参考电流表达式为

4.3 装置控制策略
系统总的传递有功电流包括α侧供电臂输出电流与 β 侧供电臂输出电流两部分,其中,α 侧供电臂的参考电流为 α 侧供电臂输出电流的理论计算值,β 侧供电臂的参考电流为两侧总的输出电流与α侧供电臂实际输出电流的电流差值。两端供电臂输出电流协同控制,最终完成机车不停电、不降功过分相[23-24]。
在机车过分相时,需要实现对参考电流的快速跟踪控制,而UPT具有很快的响应速度,能在一个周波内快速响应,因此考虑UPT控制系统采用滞环电流控制[25-26]。其中,α侧供电臂的参考电流为

β侧供电臂的参考电流为
5 UPT的仿真与实验
5.1 仿真条件
高速铁路牵引供电系统的电气仿真参数及传输线参数分别见表2和表3。
表2 仿真模型参数Tab.2 Parameters of simulation model

表3 传输线参数Tab.3 Parameters of traction network transmission lines
为了验证所提出的 UPT的工作特性与控制策略的有效性,本文利用 Matlab建立机车过分相的仿真模型。考虑机车在0.265s从α侧供电臂刚开始进入分相区,在0.5s从分相区刚开始进入β侧供电臂。分析单辆机车在经过分相区的过程中,机车电压变化曲线以及过分相装置输出电流变化曲线的仿真特性。
5.2 仿真分析
5.2.1 机车电压特性仿真分析
1)基于传统两相式MMC的机车过分相电压特性
当机车基于两相式MMC过分相时,假设机车从α侧供电臂驶向β侧供电臂,在整个过程中,能量完全由α侧供电臂提供。
上、下行全并联运行下末端电压变化特性如图12所示。当机车在分相区中运行时,牵引网末端电压为 25.28kV,此时牵引网末端电压在机车正常满额运行的电压范围之中;机车0.5s进入供电臂的瞬间,电压发生瞬时跌落,随着机车的进一步运行,末端电压有一定的抬升。此时牵引网末端电压为23.7kV,下降比较大,机车将处于非满额功率运行。
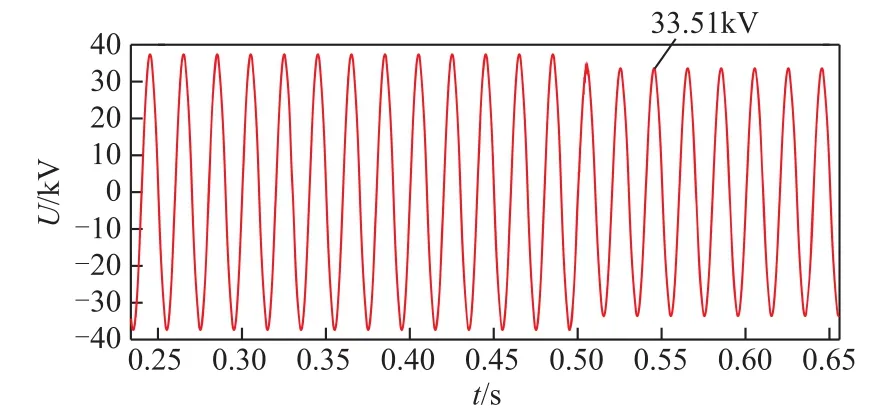
图12 上、下行全并联运行下末端电压变化特性Fig.12 Variation characteristics of terminal voltage under up and down parallel operation
2)基于UPT的机车过分相电压特性
当机车从分相区进入供电臂时,利用UPT发出无功电流从而补偿机车负荷突然接入所引起的电压缺额,补偿电压波形图如图13所示。在机车进入分相区后,从两侧供电臂吸收的电流幅值和一定,分相区电流波形如图14所示。
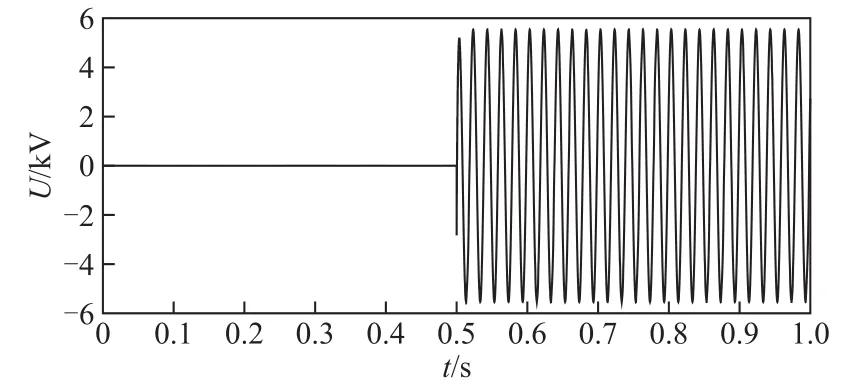
图13 UPT补偿电压波形Fig.13 UPT compensation voltage waveform

图14 分相区电流变化仿真分析Fig.14 Simulation analysis of current variation characteristics
从图14可以看出,在高速列车通过分相区的整个过程中,机车上的电压相位实现了从 α侧供电臂驶向β侧供电臂的连续转变。由图15a可知,机车在进入分相区之后,分相区上的电流保持幅值恒定的良好正弦波形;由图15b可知,机车在分相区上的电压幅值与 α侧供电臂及 β侧供电臂上的电压幅值相等。故在机车在从 α侧牵引供电经过分相区驶向 β侧供电臂的过程中,机车上的电压幅值不变,相位实现由α侧供电臂电压相位向β侧供电臂电压相位的连续平滑调节,与理论分析结果相同。
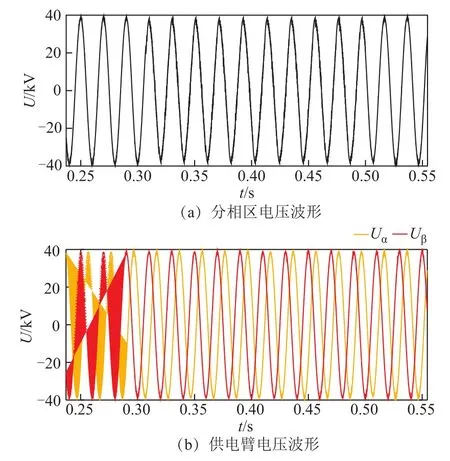
图15 电压变化特性仿真分析Fig.15 Simulation analysis of voltage variation characteristics
5.2.2 供电臂电流特性仿真分析
传统的机车过分相方式是采用两相式MMC装置。装置两侧的电流传输特性如图16所示。考虑机车一直满额运行,当机车从分相区进入β侧供电臂时,两侧传输电流发生突变,α侧供电臂电流突降为 0,β侧供电臂电流突增为 491.2A,两侧电流幅值特性见表4。
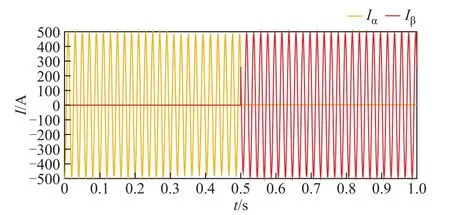
图16 基于传统两相式MMC的供电臂两侧电流波形Fig.16 Current waveforms on both sides of traction power supply arm based on traditional two-phase MMC
基于UPT的供电臂两侧电流波形如图17所示。从图17可以看出,高速列车在通过分相区的整个过程中,在α侧供电臂上运行时,α侧供电臂电流幅值最大,此后该电流幅值线性减小,当机车进入β侧供电臂时,该电流幅值减至0;当机车在α侧供电臂上运行时,β侧供电臂电流幅值为0,此后该电流线性增大,当机车进入β侧供电臂时,β侧供电臂上的电流达到最大。同时,两侧供电臂上电流之和幅值保持一定,为491.2A,与理论结果分析特性相同。
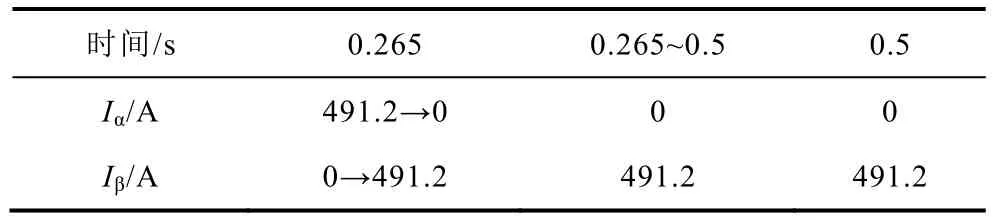
表4 传统过分相装置电流幅值的仿真数据Tab.4 Simulation data of current amplitude of traditional phase-separation passing device
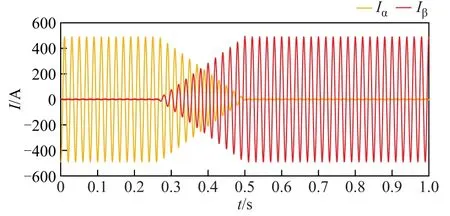
图17 基于UPT的供电臂两侧电流波形Fig.17 Current waveforms on both sides of traction power supply arm based on UPT
表5 UPT电流幅值的仿真数据Tab.5 Simulation data of current amplitude of UPT
与传统式过分相装置相比,UPT能保障机车在过分相时,分相区从两侧吸收的电流实时线性变化,但是总和仍然保持为491.2 A不变。
5.3 实验分析
为了进一步验证 UPT的有效性和优点,搭建了小容量的实验平台进行相关的实验。实验平台如图18所示。主变压器匝数比为380V:220V,额定功率为10kV·A,MMC容量为2kvar。负载位于一个电源臂中,其容量为800W,耦合电感为10 mH。子模块由两个1 200V 50A IGBT和一个450V、2 200μF电容组成,MMC的开关频率为 10kHz,调制比为0.85。通过开关的投切来模拟机车过分相的过程。采用TI公司的TMS320F2812 DSP作为UPT系统的控制器来输出控制信号,且所有控制程序都在DSP中运行。
图18 实验平台Fig.18 The experiment platform
实验结果如图19~图21所示。
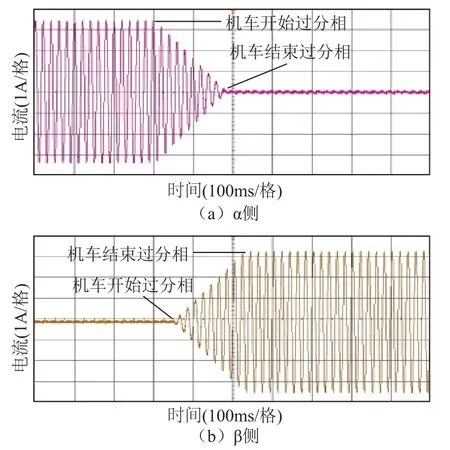
图19 供电臂有功电流波形Fig.19 Active current waveform of traction arm
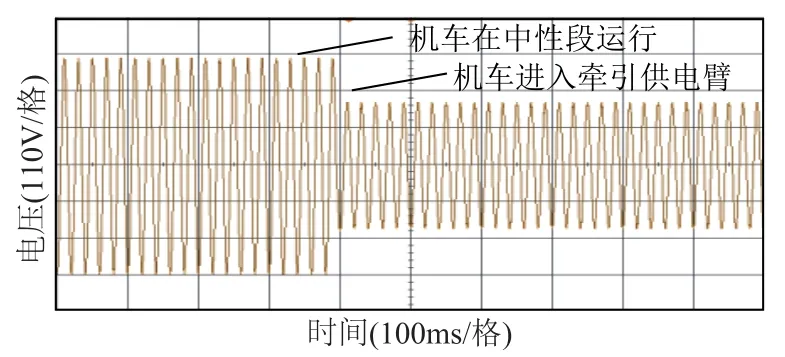
图20 末端电压变化波形Fig.20 Terminal voltage variation waveform

图21 机车过分相时分相区与两侧供电臂电压波形Fig.21 Voltage waveforms of neutral section and traction arms on both sides of locomotive phase-separation passing
从图20可以看出,本文提出的UPT可以在机车过分相情况下保证两侧供电臂电流线性变化,且其电流和保持为3.42A不变,证明了其有效性。图21表明,机车在过分相进入供电臂时,将引起的电压跌落。图 22表明,UPT能保证机车在过分相的过程中,电压波形保持幅值为 311V的正弦变化且相位实现了由α侧供电臂相位至β侧供电臂相位的变化,装置对机车突然接入所引起的电压跌落进行了补偿,进一步证明了UPT的优点。
6 结论
本文提出了一种分相区不停电过分相系统UPT,对拓扑结构的无功补偿特性与电流传输特性进行了分析,并研究了UPT的控制策略。结论如下:
1)UPT能使机车负荷不停电地通过分相区且负荷线性变化。在经过分相区的过程中,UPT能保证机车电压发生移相变化。
2)通过 UPT发出无功电流,解决了机车过分相的末端电压波动问题。
3)提出了UPT的控制策略,具有较好的动态响应特性。通过Matlab仿真验证了UPT能使机车不停电、不降功地通过分相区,同时能保证负荷线性变化。搭建了小容量实验平台,对机车通过过分相时的系统电流变化特性进行了硬件实验验证,实验结果验证了理论分析的有效性及可实施性。
猜你喜欢
中国设备工程(2023年2期)2023-02-13 06:22:56
装备制造技术(2021年2期)2021-07-21 05:38:24
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
铁道通信信号(2019年2期)2019-03-26 06:39:42
铁道通信信号(2018年12期)2019-01-31 05:36:28
消费导刊(2018年10期)2018-08-20 02:57:02
文苑·经典美文(2018年2期)2018-03-03 05:38:02
中国铸造装备与技术(2017年3期)2017-06-21 11:33:36
陕西教育·综合版(2016年12期)2016-06-27 07:38:20
