
定频化VIENNA整流器模型预测电流控制
2021-03-15 07:34:44韩会山靳晨聪毕艳军
电气传动 2021年5期
韩会山,靳晨聪,毕艳军
(邢台职业技术学院电气工程系,河北邢台054000)
VIENNA整流器是一种高性能三电平整流器,凭借其电路结构简单、功率器件少、三电平特性的优点,在工业场合,尤其是对网侧电流质量要求高的场合应用十分广泛[1-4]。目前,VIENNA整流器已经被广泛应用于充电桩、通信电源以及电机驱动等对功率密度要求较高的场合[5]。
目前,国内外学者针对VIENNA整流器的闭环控制已经进行了很多研究,控制方法已由传统的线性控制发展至非线性控制[6],例如无源型控制[7]、滑模控制[8]等。但这些方法设计较为复杂,不利于控制系统的实现。模型预测控制(model predictive control,MPC)作为一种新型的非线性控制方法,由于其原理简单、适用于非线性系统、以及易于控制多个约束目标的优点,非常适合于电力电子变换器的控制[9-10],而其中模型预测电流控制(model predictive current control,MPCC)由于其对电流的直接控制,非常适合于VIENNA整流器。
目前MPC已经开始被应用于VIENNA整流器当中,文献[11]对VIENNA整流器数学模型进行了建立,并将有限集模型预测控制引入到了VIENNA整流器系统控制中,但是其电流给定设计复杂,且开关频率不固定,控制性能较差。文献[12]提出了一种基于离散空间矢量调制的模型预测控制方法,这种方法虽然可以固定开关频率,但是其计算复杂,不利于控制系统的设计。文献[13]采用了一种预测控制与滑模控制相结合的滑模预测直接功率控制,这种方法虽然可以对输入有功、无功进行有效控制,但对输入电流控制效果较差,并且这种混合控制方法的控制器设计较为复杂。
针对应用于VIENNA整流器的MPC开关频率不固定、设计较为复杂等问题,本文首先将传统MPCC方法引入VIENNA整流器控制中,然后通过对价值函数进行优化,同时引入调制模块,实现了预测电流控制的定频化。通过实验验证了所提方案的正确性与可靠性。
1 系统模型
VIENNA整流器的电路拓扑结构如图1所示,主要由输入滤波电感、三相整流桥、双向功率桥臂以及直流滤波电容组成,不控整流桥承担大部分功率。由于直流侧中点钳位的作用,输入侧体现三电平特征。

图1 VIENNA整流器电路拓扑Fig.1 Topology of VIENNA rectifier
结合图1所示的电路拓扑,由基尔霍夫定律可以得到在ab c坐标系下的系统回路方程如下式:

式中:ia,ib,ic为三相输入电流;Ua,Ub,Uc为三相输入电压;Uao,Ubo,Uco为交流侧桥臂中点与直流中点之间的电压;Ls为滤波电感;uoN为直流中点与交流侧中性点之间的电压;R为输入等效电阻。
在ab c坐标系下系统三相之间有耦合,不利于MPC的实现,对此将系统数学模型转换至α-β坐标系下,转换矩阵如下式所示:

设VIANNA整流器的输入桥臂中点的电压为UaN,UbN,UcN,据此可得在α-β坐标系下系统数学模型如下:

VIENNA整流器属于三相三电平拓扑,但是由于其结构是一种单向Boost型的,因此其零电压矢量输出有限,故其只能产生25种电压矢量。VIENNA整流器的空间电压矢量与开关状态对应的分布图如图2所示。
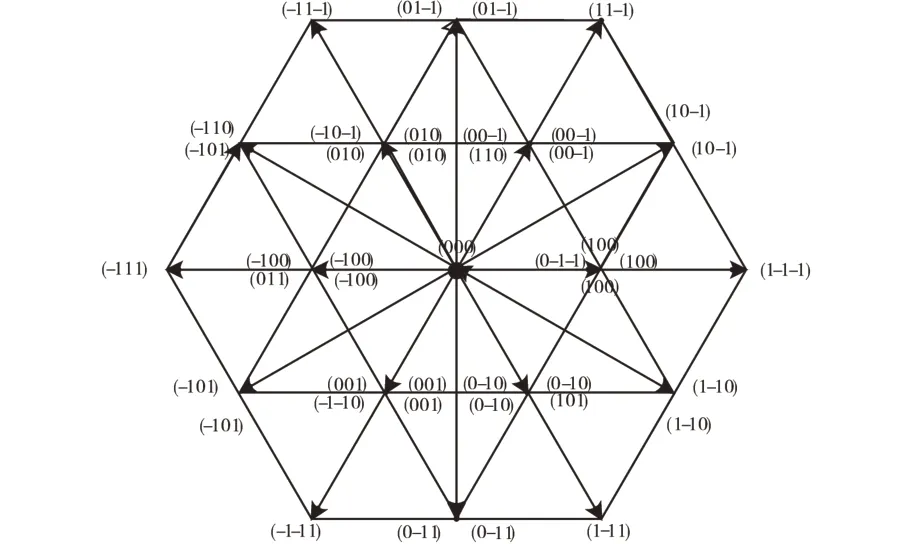
图2 空间矢量分布图Fig.2 Space vector distribution diagram
2 传统模型预测电流控制
首先,为了得到系统的离散数学模型,需要对原有数学模型离散化,常采用一阶前向欧拉法对模型进行离散化,采用的离散表达式如下:

根据式(3)所示的数学模型,采用式(4)所示的离散化方法,可获得如下式所示的系统在α-β坐标系下的离散化数学模型:
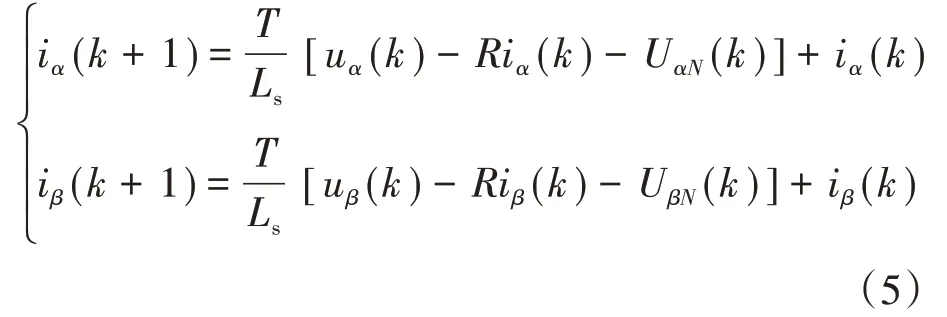
式中:iα,β(k+1)分别为输入电流在α轴和β轴的分量;uα,β(k+1)分别为输入电压在α轴和β轴的分量;uαN(k),uβN(k)为桥臂输入电压在α轴和β轴的分量。
式(5)就是VIENNA整流器的电流预测模型。
根据系统控制目标,以预测电流与参考电流差的平方作为价值函数用于评价候选矢量,构建的价值函数表达式如下:

在获得VIENNA整流器的离散数学模型之后,将图2中所示的25种电压矢量分别代入预测模型中,获得相应的预测电流,再根据价值函数选出最优电压矢量,将此矢量对应的开关状态输出作用于变换器。传统模型预测控制实现流程图如图3所示。

图3 MPC实现流程图Fig.3 Flow diagram of MPC
3 定频化MPC
传统的MPC存在计算复杂,开关频率不固定的缺点,这阻碍了模型预测控制在VIENNA整流器中的应用,因此本节提出了一种优化算法固定开关频率。
首先,将式(5)所示的系统离散数学模型转换至d-q坐标系下,用于转换的矩阵如下式所示:
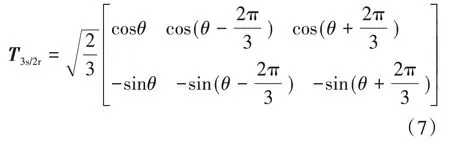
式中:θ为阻抗角,单位rad。
将式(5)与式(7)相乘进行转换,经坐标转换后的系统预测模型如下式所示:

式中:id,q(k+1)为预测电流在d,q轴下的分量;ud,q(k)为输入电压在d,q轴下的分量;id,q(k)输入电流在d,q轴下的分量;Ud,q(k)为桥臂电压在d,q轴下的分量;ω为角频率,单位rad/s。式(8)就是d-q坐标系的预测模型。此时,重新定义d,q轴下的价值函数如下式:

令k+1时刻参考电流值和预测值相等,有:


为了将式(11)中的未知量用已知量表示,结合式(8)和式(11)可以得到如下表达式:

对其求偏导,且令偏导数为零,可得:
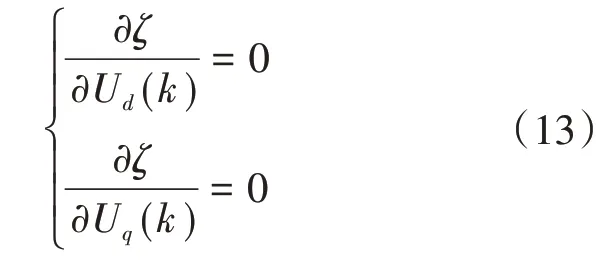
由上可得k时刻桥臂电压参考值如下:


图4 实现框图Fig.4 Realization block diagram
4 实验结果
为了验证本文所提方案的正确性,搭建了以ARM为控制核心的实验平台,试验参数为:直流母线电压200 V,直流侧C1=C2=1 500μF,滤波参数L1=10 mH,采样频率10 kHz,电网电压100 V/50 Hz,输出功率Po=500 W。
图5为在传统MPC控制下的VIENNA整流器稳态运行时的波形。从图5a可以看出,此时系统输出电压稳定在200 V左右,同时,输入电压电流相位相同,此时,输入电流正弦,但输入电流纹波较大;从图5b所示的输入电流FFT可知,此时输入电流THD>5%,不满足并网电流的要求。
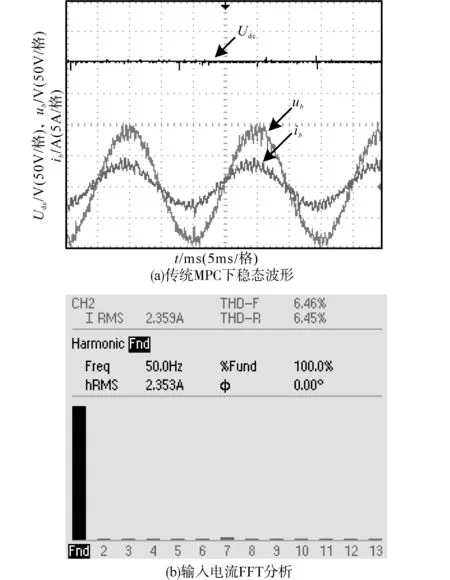
图5 传统MPC下VIENNA整流器稳态波形Fig.5 Steady-state waveforms of VIENNA rectifier under conventional MPC
图6为采用传统MPC控制方法下的系统动态波形。图6a为系统负载由100%Po突变为60%Po时系统的动态波形;图6b为系统负载由60%Po突变为100%Po时系统的动态波形。可以看出,在传统MPC控制下,不论在负载突增还是突减情况下,输出电压都可以快速跟踪给定。
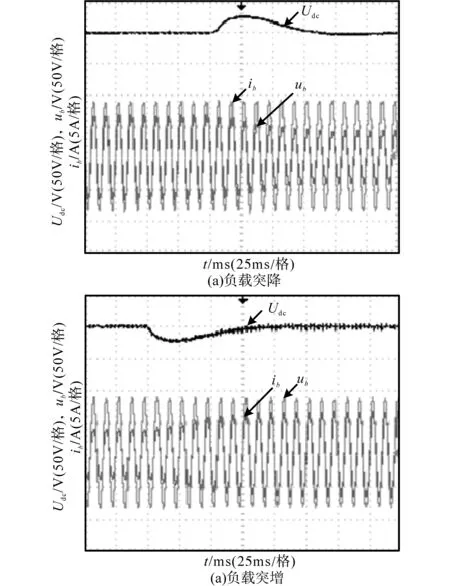
图6 传统MPC下负载突变时系统稳态波形Fig.6 System steady-state waveforms when load is abrupt under conventional MPC
图7为采用定频化预测控制下的VIENNA整流器稳态实验波形。从图7a中可以看出,此时系统输出电压稳定在200 V左右,同时,输入电压电流同相位,此时,输入电流正弦,且纹波很小,从图7b所示的输入电流FFT可知,此时输入电流THD<5%,满足并网要求。
图8为采用定频化MPC控制方法下的系统动态波形。图8a为系统负载由100%Po突变为60%Po时系统的动态波形;图8b为系统负载由60%Po突变为100%Po时系统的动态波形。从图中可以看出,无论系统负载突增还是突减,在很短时间后系统会重新恢复稳定,输出电压可稳定在给定附近,系统具有良好的动态性能。对比图6与图8可以发现,定频化MPC基本可以实现与传统MPC一样的动态控制性能,这说明了定频化MPC在提高稳态控制性能的同时,动态性能也保持良好。
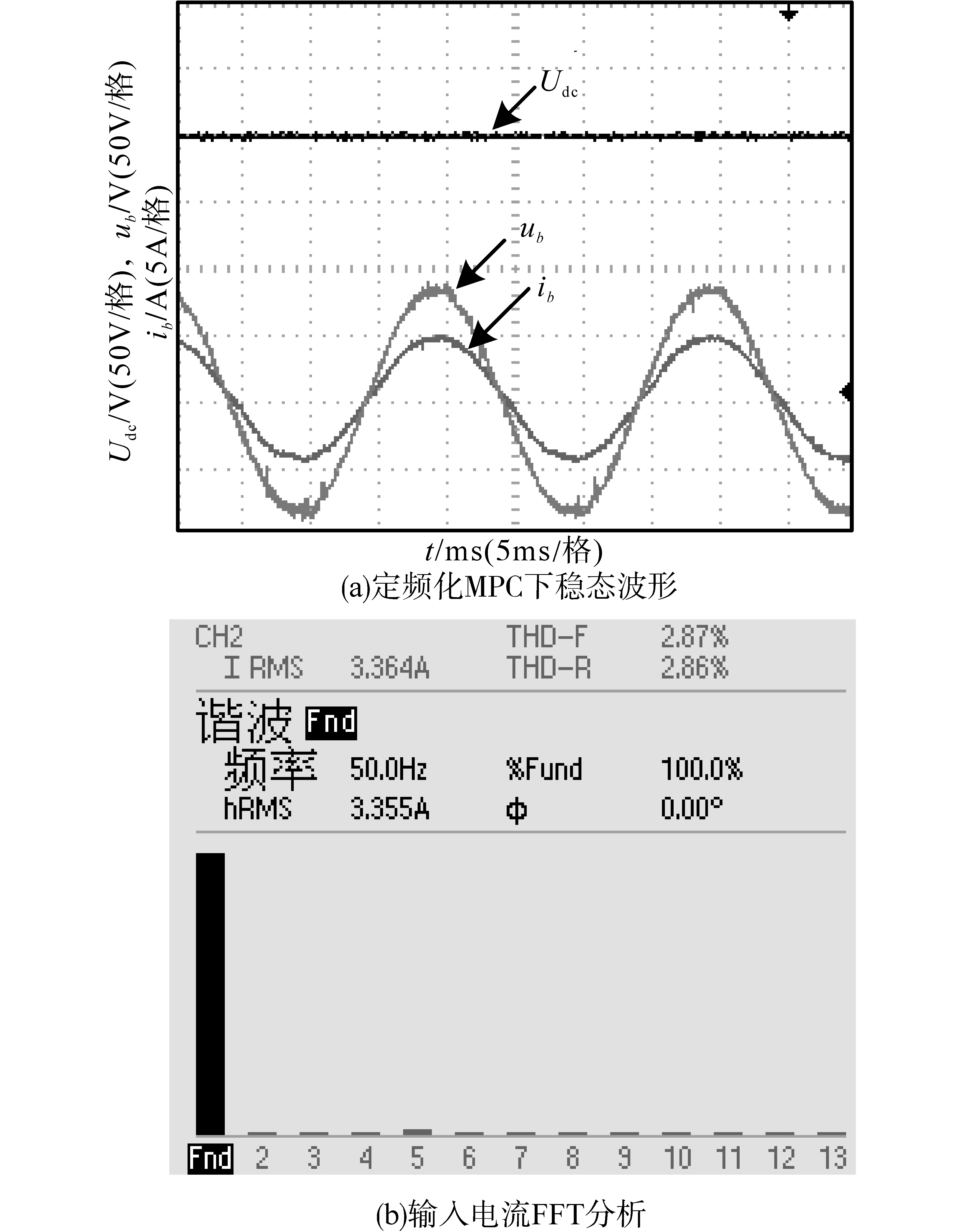
图7 定频化MPC下稳态波形Fig.7 Steady-state waveforms under fixed-frequency MPC
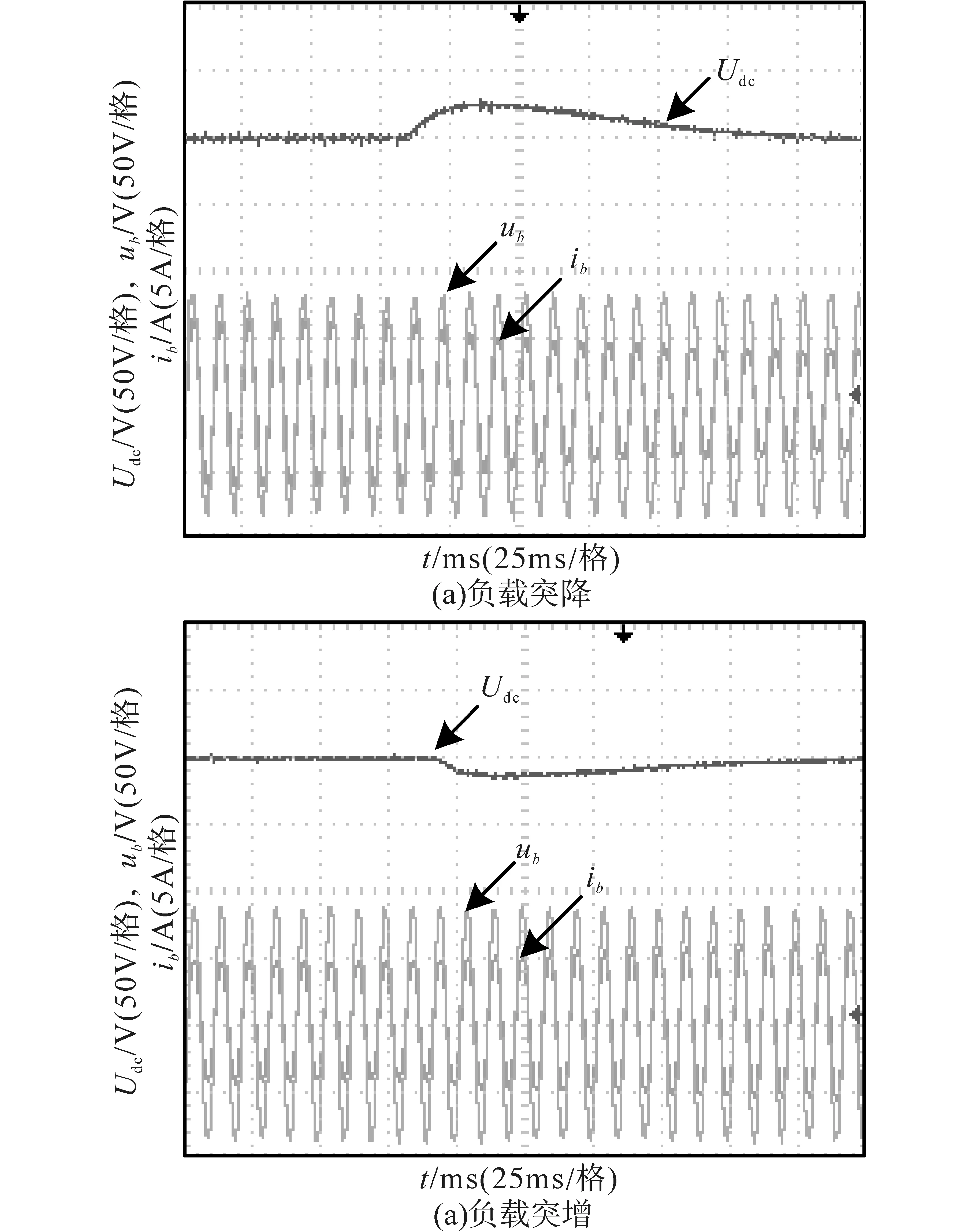
图8 定频化MPC下负载突变时系统稳态波形Fig.8 System steady-state waveforms when load is abrupt under fix-frequency MPC
5 结论
本文将MPC引入到了VIENNA整流器的控制中,并针对传统MPC开关频率不固定的缺点提出了一种定频化MPC方法,通过引入d-q坐标系下离散数学模型,并进行价值函数优化,预测出新的调制信号,用过SPWM调制使开关频率固定,优化系统控制性能。通过搭建实验样机,利用实验证明了所提方法能有效改善系统控制性能。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
煤气与热力(2021年4期)2021-06-09 06:16:54
科学家(2021年24期)2021-04-25 17:55:12
中华戏曲(2020年1期)2020-02-12 02:28:18
现代防御技术(2016年1期)2016-06-01 12:13:28
通信电源技术(2016年4期)2016-04-04 02:57:16
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电源技术(2015年1期)2015-08-22 11:16:26
