
永磁同步电机离散化建模与分析
2021-03-15 07:34杨淑英王奇帅东野亚兰谢震
电气传动 2021年5期
杨淑英,王奇帅,东野亚兰,谢震
(合肥工业大学电气与自动化工程学院,安徽合肥230009)
与感应电机相比,永磁同步电机具有高效率、高功率密度和比功率、高启动转矩等优点,尤其是内置式永磁同步电机(IPMSM)具有的凸极效应,可提供磁阻转矩、强弱磁能力和宽调速范围的适应性,被广泛应用于新能源汽车驱动中[1]。新能源汽车电驱动的特点是高速化发展,目前车用IPMSM的最高运行频率甚至超过1 000 Hz。然而受限于开关损耗,逆变器的开关频率难以继续升高,导致系统的载波比(开关频率与基波频率比)甚至低于10[2-3]。
在低载波比条件下,常规连续域设计的电流控制器在数字化实现时受到数字控制延迟和离散化误差的影响,系统性能难以得到保障。为了提高系统在低载波比条件下的控制性能,国内外学者做了大量努力。文献[4]在传统PI电流控制器的基础上,考虑PWM保持特性以及数字控制产生的延迟的影响,补偿了由延迟引起的坐标变换角度的滞后;文献[5]在文献[4]的基础上,通过引入有源阻尼的方法,减小了电流震荡;文献[6]则深入分析了延迟对包含有源阻尼电流环的影响机理;文献[7]在考虑延迟的基础上,进一步给出了减小电流环调节时间和超调量的电流控制器参数设计方法。然而,上述方法均是在连续域中分析和设计电流控制器,实际数字化实现过程中,需要将连续域设计的控制器通过离散化方法转化为差分表示形式,这会受到离散化误差的影响,这点在文献[8]中得到了印证。文献[9]比较了几种典型的电流环连续域设计方法,通过零极点分布图讨论了电流环控制性能随载波比的降低而下降的原因,并给出了一种直接在离散域分析和设计电流环的方法,该方法使电流环的控制性能理论上不再受载波比的影响,保障了电机控制系统低载波比运行性能。
直接离散域分析和设计的基础是离散化模型,离散化模型自身的准确性也将影响分析的正确性和控制性能。对于表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM),其交、直轴电压方程具有相同的参数,模型具有对称性,可以使用复矢量描述方式,使其分析、设计过程得到简化。如文献[10]在连续域中、文献[9,11-12]在离散域中,均利用了复矢量建模技术将SPMSM模型转换为单输入单输出(single input single output,SISO)系统。然而,对于IPMSM而言,其凸极特性使得交轴电感大于直轴电感,交、直轴电压方程不再相同,限制了复矢量建模技术的利用。文献[13]直接采用状态空间法对IPMSM进行离散域建模。尽管具有较高的建模精度,但所获得的模型中包含多个三角函数及双曲函数运算,工程实现运算量较大。为此,该文作者试图通过泰勒级数近似的方式对模型进行不同程度的简化,获得精度和运算量的折中。为将复矢量建模技术运用于IPMSM对象,文献[14]提出以磁链为状态量的建模方法,但其离散化建模过程依然受到定子电阻压降的影响,且控制器的实现受到电感参数的影响。尽管作者试图通过前馈补偿的方式弥补电阻压降的影响,但考虑到控制延迟的影响,实际补偿效果不佳。
纵观研究报道不难发现,低载波比和高性能的控制需求使得直接离散域设计受到了学界越来越多的关注和重视,而IPMSM的离散化建模问题依然没有得到很好的解决,成为其离散化控制系统设计和实现的制约因素。文献[15]就模型的不同近似程度对控制性能的影响进行了讨论。
本文在对连续域控制系统设计数字化实现时存在问题进行分析的基础上,讨论了直接离散域控制器设计的必要性。针对离散化模型的建立问题,在对工程中常用的欧拉法和Tustin法离散化建模精度进行讨论的基础上,重点分析了电阻压降对以磁链为状态量离散化建模的影响。研究表明,通过对采样间隔内电流状态的一阶描述所获得的离散化模型在精度上与文献[13]直接基于状态空间离散化建模方式所获得的数学模型没有明显的差异,但却具有简洁的形式,利于控制系统设计和实现。本文在离散化建模中的突出贡献在于,通过电流响应的近似描述,提升了IPMSM复矢量建模的精度。此外,为便于工程实现,本文将所建立的磁链状态数学模型转换为电流状态数学模型。最后,通过典型控制器的设计,进一步对数学模型的精度及其对性能的影响进行了验证。
1 PMSM电流控制器数字化实现误差分析
1.1 数学模型
PMSM在同步旋转坐标系下的数学模型为

其中:
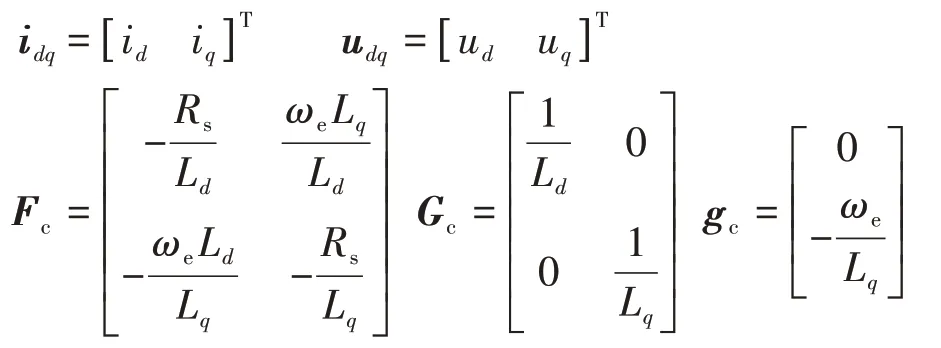
式中:Ld,Lq分别为定子直轴和交轴电感;Rs为定子电阻;ωe为电角速度;Ψf为永磁体磁链;idq为同步旋转坐标系下的定子电流向量;udq为同步旋转坐标系下的定子电压向量。
对SPMSM而言,Ld=Lq=Ls,可利用复矢量描述方式将式(1)重新表述为[1]

式中:udq(t)和idq(t)分别为复矢量形式的电压和电流,且udq(t)=ud(t)+j uq(t),idq(t)=id(t)+j iq(t)。
式(2)对应的电路框图描述如图1所示。
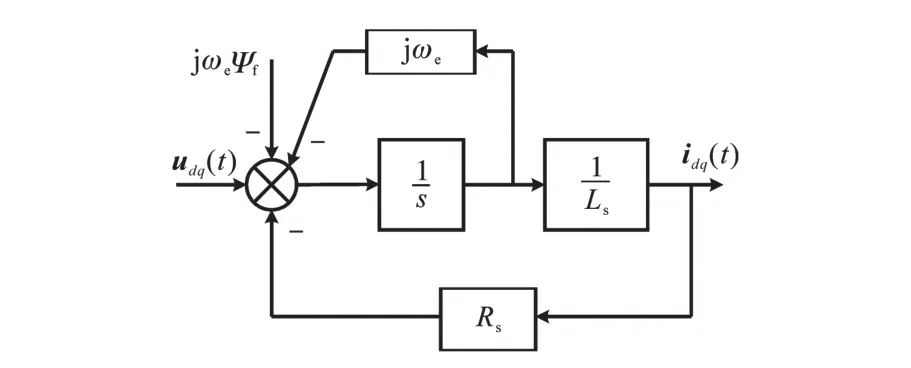
图1 SPMSM复矢量模型原理图Fig.1 Schematic diagram of SPMSM complex vector model
1.2 连续域控制器设计
为使问题分析更加清晰,这里以SPMSM为例,对连续域控制器设计存在的问题进行讨论。
以经典PI调节器为例,控制器传递函数为

式中:α为期望的电流环带宽,带宽α参数的选取可参考文献[9-10];x^为x的估计值。
数字化实现过程中,需要将式(3)的连续域控制器进行离散化,获得其对应的差分方程。在文献[8]中已经验证Tustin法的离散化误差要小于欧拉法的离散化误差,这里以Tustin法对式(3)进行离散化,得:

式中:Ts为采样周期。
若考虑到延迟补偿,可将离散化控制器描述为

1.3 闭环系统误差分析
为了对离散化误差进行量化分析,这里需要获得SPMSM的精确离散化模型,如下式所示:

其具体推导过程见文献[9]第三节。
由式(5)和式(6)可得系统的闭环脉冲传递函数为

画出系统闭环脉冲传递函数随基波频率fe变化的零极点分布图,所用模型参数:定子电阻Rs=0.015Ω,定子电感Ls=0.3 mH,采样周期Ts=100μs,电流环带宽α=2π·1 000 rad/s。图2和图3中分别描述了未考虑和考虑延迟补偿情况下极点随基波频率的变化。
对未补偿延迟角的情况,如图2所示,当fe/fs>0.046,即载波比下降到22时,闭环极点z3从单位圆中移出,系统开始出现不稳定。考虑延迟补偿后,如图3所示,当fe/fs>0.075,即载波比下降到13时,闭环极点z3开始从单位圆中移出。尽管通过对数字控制延迟的补偿能够提升低载波比的稳定性,但所能实现的载波比依然较高。连续域数字控制器设计难以满足高速化运行需求,尤其是对于IPMSM,其离散化影响更为严重[13-14]。为了满足高速低载波比需求,直接在离散域中设计电流调节器成为必然。
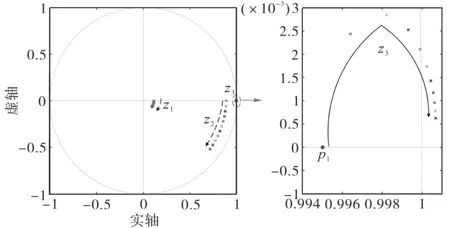
图2 未加延迟补偿时PI电流控制的系统闭环极点迁移图Fig.2 Pole shift diagram of PI current control loop without delay compensation
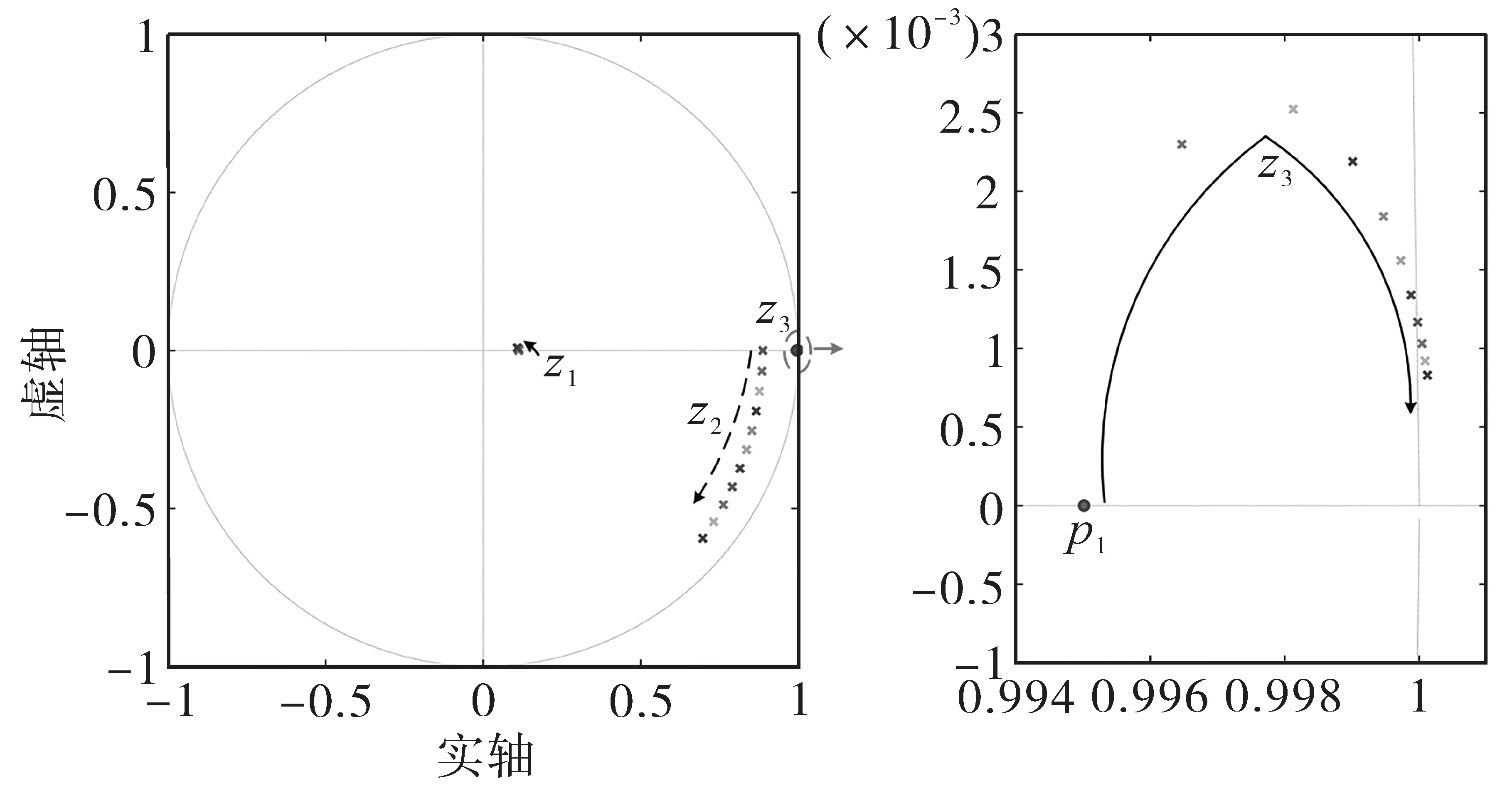
图3 含延迟补偿的PI电流控制的系统闭环极点迁移图Fig.3 Pole shift diagram of PI current control loop with delay compensation
2 IPMSM离散域常用数学模型
直接利用状态运动响应对状态方程进行离散化,理论上能够获得精确离散化模型,具体推导过程见文献[13]附录,其表达式如下式所示:

其中
F=CΦC-1
G=CΓ
g=Cγ+(I-F)d
式中:C,I,d为定常矩阵;Φ,Γ,γ为离散系统矩阵。
其具体表达式为

矩阵Φ求解结果为

其中
矩阵Γ求解结果为

其中

矩阵γ求解结果为
其中

式(8)中的系数矩阵含有多个指数函数、三角函数、双曲函数运算,形式上较为复杂,不利于控制系统设计和分析,且计算量大。相比而言,欧拉法和Tustin法对IPMSM模型进行离散化,在工程上较为常用。
2.1 欧拉法和Tustin法离散化模型
采用欧拉法可将式(1)对应的离散形式表示为

其中
值得注意的是,输入电压是在静止坐标系下具有零阶保持特性,因此对于同步旋转坐标系下的输入电压在离散化时应该取一个控制周期内的等效作用电压。在文献[4]中给出了一种近似补偿方法,采用这种方法易得:

其中
同理,采用Tustin法离散化,式(1)离散化为

其中

2.2 离散化误差分析
为了直观地对比欧拉法和Tustin法离散化对模型精度的影响,本文采用文献[16]中矩阵范数的分析方法,将离散化误差定义为

式中:M为前述零阶保持法离散化获得的精确模型中的矩阵;Mx为前述欧拉法或Tustin法离散化获得的近似模型中的矩阵。
图4展示了欧拉法和Tustin法离散化误差随基波频率fe变化的误差曲线,所用参数与下文中第5节中仿真参数设置相同。

图4 欧拉法和Tustin法离散化误差随基波频率的变化Fig.4 Discrete errors against fundamental frequency when using Euler and Tustin techniques
从图4可以看出,系数矩阵F、输入矩阵G、以及扰动输入矩阵g所对应的误差随着基波频率的增加尽管不是线性增大,但误差大小是在增加的。欧拉法的离散化误差全频段都大于Tustin法。以系数矩阵F为例,在基波频率fe=1 000 Hz、载波比为4时,Tustin法离散化误差约为11.6%,远小于欧拉法的113%。输入矩阵G和扰动输入矩阵g的误差分析可以得到类似的结论。但也清楚地看到,即使采用Tustin法离散化,模型离散化误差依然较大。
3 磁链为状态量的IPMSM离散域对称化建模方法
第2节中的IPMSM工程常用的离散域数学模型在低载波比条件下误差较大。以磁链为中间状态量,运用复矢量描述技术对模型进行离散化,能够实现模型的精度和复杂度的折中,但因磁链和电流状态的关联性,其离散过程受到电阻压降的影响。本节将就采样周期中电流变换的不同描述方式对离散模型精度的影响进行分析和讨论,并获得一种具有较高建模精度的复矢量离散化建模方案。
3.1 IPMSM模型的复矢量描述
引入磁链状态取代式(1)中电流非对称项,可将IPMSM模型写成复矢量形式,如下式:

式中:iαβ(t),uαβ(t),λαβ(t)为静止坐标系下的定子电流、电压和磁链复矢量;eαβ(t)为静止坐标系下的反电动势扰动项。
复矢量的定义与式(2)相同。
如前述易知,式(17)中的定子电压矢量由于零阶保持特性,在k Ts<t<(k+1)Ts时间段内可看作是定值,即

由于电气时间常数远小于机械时间常数,可认为转速ωe在kTs<t<(k+1)Ts时间段内保持不变,因此反电动势eαβ(t)在此期间只需要考虑坐标轴的旋转,即

尽管式(17)实现了复矢量表示形式,但定子电流以定子电阻压降的形式耦合到电压方程中,且由于交、直轴电感不相等,电感矩阵不具有对称性,电流复矢量无法通过磁链复矢量进行取代。同时,电流状态和磁链状态不具有相互独立性,在采样间隔内同步变化。因此,如何对采样间隔,即kTs<t<(k+1)Ts时间段内定子电流的变化进行描述成为式(17)模型离散化的关键。由泰勒级数可知,阶次越高,对函数的描述越准确,但计算量也将更大。为保持近似处理方案的简洁性,这里仅考虑0阶和1阶泰勒级数近似电流描述方式。
1)假设定子电流在静止坐标系下保持不变。静止坐标系下,定子电流在kTs<t<(k+1)Ts时间段内保持恒定,即

为便于叙述,后文将该处理称作方案1。
2)假设定子电流在同步旋转坐标系下保持不变。同步旋转坐标系下,定子电流在k Ts<t<(k+1)Ts时间段内保持恒定,即

变换到静止坐标系,得:

后文将该处理称作方案2。
3)假设定子电流在静止坐标系下线性变化。静止坐标系下,定子电流在kTs<t<(k+1)Ts时间段内线性变化,即

后文将该处理称作方案3。
4)假设定子电流在同步旋转坐标系下线性变化。同步旋转坐标系下,定子电流在k Ts<t<(k+1)Ts时间段内线性变化,即

变换到静止坐标系下,得:后文将该处理称作方案4。
5)忽略定子电阻压降。有些文献中,针对定子电流耦合问题,直接将定子电阻压降进行忽略处理,即

后文将该处理称作方案5。
3.2 IPMSM近似离散化模型的求取
有了定子电压、反电动势扰动和定子电流的表达式,求解IPMSM离散化模型,只需要求解微分方程式(17)即可。以方案1为例,将式(18)~式(20)代入式(17),求解定子磁链在k+1时刻的值,有:
将式(27)变换到同步旋转坐标系下,得:
其中 edq(k)=jωeΨf
式(28)以复矢量符号表示的模型其状态变量为定子磁链,为获得以定子电流为状态变量的系统模型,将式(28)改为状态空间描述,即
其中

化简后可以得到:

其中
同理可以求得方案2到方案5所对应的离散化模型,分别为如下:
方案2离散化模型为

其中
方案3离散化模型为

其中

方案4离散化模型为

其中
方案5离散化模型为

其中

仍然采用式(16)所定义的误差形式,可以得到5种方案模型的误差曲线,如图5所示。
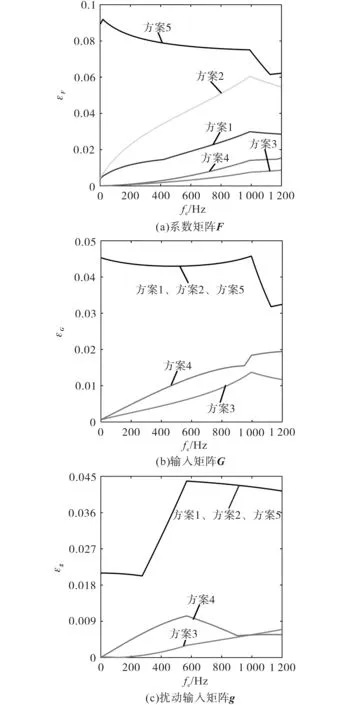
图5 5种电流描述方式对离散化误差的影响Fig.5 Effects on the discrete errors of the five different current approximations
由于方案1、方案2和方案5所得到的矩阵G和g是相同的,因此其误差曲线重合。由图5可以得出以下结论:①随着转速升高,离散化误差增加,但整个速度范围内,方案3的离散误差最小;②全速度范围内,方案3的离散化误差基本保持在1.5%以内,具有较高的建模精度;③与图4对比可知,借助磁链状态,通过复矢量描述方式,所获得的离散化模型精度明显优于当前工程中常用的欧拉法或Tustin法。

4 控制器设计
基于上述离散化数学模型,可以在离散域直接设计电流控制器。由于本文研究的目标在于离散化模型自身,这里借用文献[13]所报道的电流控制器设计方案,对不同离散化模型的效果进行对比研究。关于离散域控制系统的设计超出了本文的范围,将在后续文章中进行报道。
为获得表述形式上的简洁性,记:

上述IPMSM离散域数学模型z变换后得:

式中:Fx,Gx,gx分别为不同离散化模型的系数矩阵、输入矩阵和扰动输入矩阵,x代表前述近似模型的下标o,T,1~5。
文献[13]中的定子电流控制律为

式中:Kt为前馈增益矩阵;Ki为积分增益矩阵;K1,K2为反馈增益矩阵。
控制器结构如图6所示。
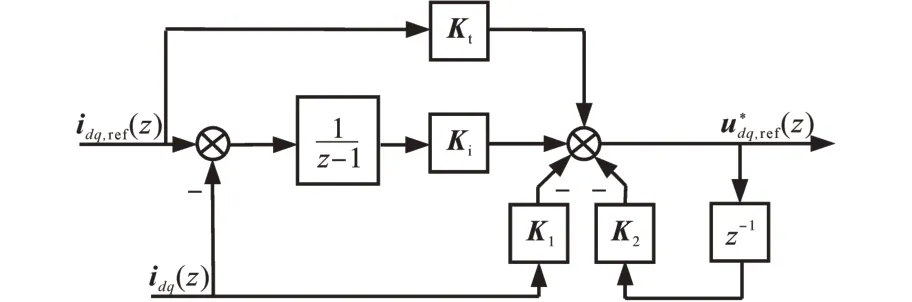
图6 控制器结构Fig.6 Block diagram of the controller
由式(36)和式(37)得系统的闭环表达式如下:

其中

式(39)为闭环脉冲传递函数,其系数矩阵为

控制系统设计的目标主要包括:①d,q轴电流响应之间无交叉耦合,即H(z)中非对角元素为0;②d,q轴电流具有相同的动态特性,即H(z)中的对角元素相同。
基于以上两个目标,给出H(z)的期望表达式为

为简化参数设计,选取a0=0。
由式(39)、式(40)可以得到增益矩阵的选择方法:
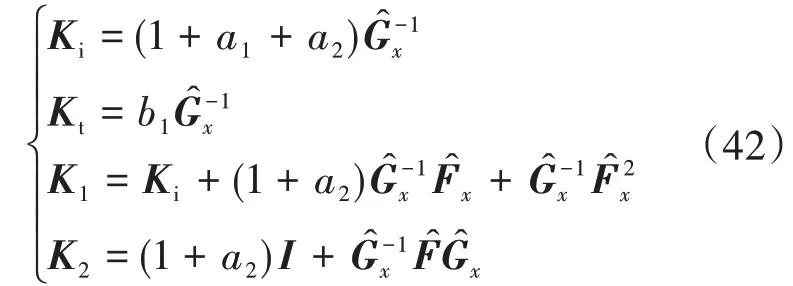
若选择a1=β2,a2=-2β,b0=β(β-1),b1=1-β,可得:

其中 β=e-αTs
式中:β为闭环系统期望的极点位置;α为设计带宽。
5 离散化模型的影响
设定电机参数:Pn=8 kW,Ld=0.14 mH,Lq=0.3 mH,Rs=0.05Ω,Ψf=0.069 Wb,极对数为4。采样与开关同步,均为4 kHz,基波频率fe=1 000 Hz,对应的载波比为4,直流母线电压Udc=340 V。β设为0.730 4,对应的电流环带宽为2π·200 rad/s。控制系统结构图如图7所示。

图7 永磁同步电机电流环控制系统Fig.7 Schematic of the PMSM current control system
对于不同的离散化模型,式(42)所获得的控制器系数矩阵也将不同。图8记录了采用不同离散化模型所获得的控制系统的电流阶跃响应过程。图8a对应于状态空间离散化法所获得的精确离散化模型;图8b对应于欧拉法离散化模型;图8c对应于Tustin法离散化模型;图8d~图8h分别对应于磁链状态复矢量离散化方案中的方案1~方案5所获得的离散化数学模型。图9对图8记录的动态过程进行了局部放大对比。
图8a表明,采用精确离散化模型时,在模型参数准确的情况下,d,q轴之间实现完全解耦,q轴电流的变化不会引起d轴电流的变化。这与式(41)所期望的闭环特性相吻合。图8b中系统已经失稳,说明欧拉法离散化获得的模型在低载波比条件下误差较大,难以满足控制需求。图8c中,系统虽然能够稳定,但显然d,q轴之间的耦合程度要大于本文所讨论的5种近似情况的任何一种,说明Tustin法离散化虽然在低载波比条件下可以保证系统稳定,但系统的性能损失较大。图8d~图8h所示的动态响应效果要明显优于Tustin法离散化。对比图8d~图8h,并结合图9所示的局部放大结果,不难发现图8f所对应方案3具有最好的动态效果,d,q轴之间的耦合程度最低。这也再次印证了离散化模型精度对控制系统设计的重要性。同时,对比图8a和图8f可知,基于方案3离散化模型获得的控制系统在性能上与基于精确离散化模型设计的控制系统相近,但相比式(8)而言,式(32)计算复杂度得到明显降低。
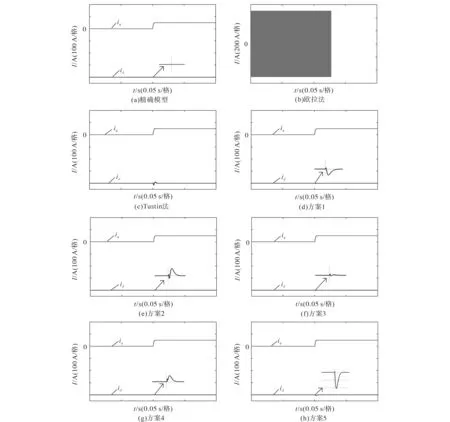
图8 电流环阶跃响应波形Fig.8 Step response of the current loop

图9 动态响应过程局部放大对比Fig.9 Zooming in partially of the dynamic responses for comparison
6 结论
本文在对工程中常用的欧拉法和Tustin法离散化建模方法对控制性能影响进行分析的基础上,针对IPMSM模型的非对称性,研究了基于磁链状态量的对称化建模方案,从而使得复矢量表述方式得以在IPMSM模型中应用。针对离散化过程受到定子电流状态的耦合影响问题,研究了采样间隔内电流的不同表述方式。通过静止坐标系下电流的一阶近似描述能够得到较为准确的离散化模型,实现了离散化模型的精度和计算复杂度的统一,有利于控制系统的设计和工程实现。
猜你喜欢
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
电测与仪表(2016年10期)2016-04-12
西部广播电视(2015年10期)2016-01-18
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年15期)2014-04-04
电测与仪表(2014年11期)2014-04-04
电力工程技术(2014年1期)2014-03-20
