
雷达!雷达!自动驾驶的鹰之眼
2021-03-12 03:39
微型计算机·Geek 2021年2期


最近的资本市场,新能源概念是出尽风头。互联网上也十分热闹,马斯克、何小鹏两位创始人在社交平台上隔空交火,阴阳怪气的对话看得吃瓜群众那才叫一个爽啊。事情源于去年广州车展上,小鹏汽车发布了一款“鹏翼版”全新P7,CEO何小鹏透露明年将推出全球首款搭载激光雷达的量产智能汽车。当晚马斯克就在Twitter上嘲讽小鹏汽车软件模仿特斯拉,随后何小鹏则在微博强硬回怼,声称要将特斯拉打得找不着东。
联想到去年马斯克还吐槽“激光雷达就像人身上长了一堆阑尾,阑尾本身的存在基本是无意义的”,“任何依赖激光雷达的公司都可能无疾而终”。按理说,激光雷达已经不在马斯克的视野范围内了,为何却在这个时候因为激光雷达而亲自上阵怼小鹏汽车呢?
有趣的是,在汽车圈子之外的华为也开始密集释放关于量产车规级激光雷达的消息。在今年广州车展期间,华为智能汽车解决方案BU总裁王军接受媒体采访时表示,华为的激光雷达已经成为车企抢购的爆品,并考虑在近期做一个激光雷达产品的整体发布。为何马斯克要因为激光雷达打口水仗,为何巨头们纷纷盯着激光雷达?这都要从汽车的智能驾驶说起。
要理解这个问题,首先要明白智能驾驶怎么实现的。在《速度与激情8》中,大反派查理兹·塞隆为了抢夺核武器发射装置,用高科技黑入汽车智能驾驶系统,使得上千辆无人汽车组成了一支庞大的“僵尸车”军团,在街头拦截俄国国防部长的专车,汽车巨浪在街头汹涌前进,画面震撼。那智能驾驶究竟怎样实现的呢?简单地说,就是给常规车加上智能驾驶模块,再连上通信网络。这个模块主要有三大核心功能:环境感知——计算决策——控制执行,分别对应于人的“眼睛——大脑——神经”。
它们的功能执行逻辑也很简单,非常像人类:走在路上,首先眼睛发现对面走来了一个人,然后大脑去决策怎么躲避这个人,最后是神经驱动肢体去绕开这个人。智能汽车的眼睛主要是由摄像头、激光雷达、高精度地图、GPS定位等构成,主要负责收集车身周边信息,确定车辆的位置。智能汽车的大脑是在收到了眼睛传来的数据信息后,通过计算芯片+感知算法,去识别交通状况,然后分析计算出最优的路线。
智能汽车的神经是基于大脑给出的决策结果,对制动系统、转向系统、电机系统等下达指令,控制车辆运行状态,执行驾驶路线。而马斯克和何小鹏的争论点在于:应该主要用什么来当眼睛,激光雷达还是摄像头?
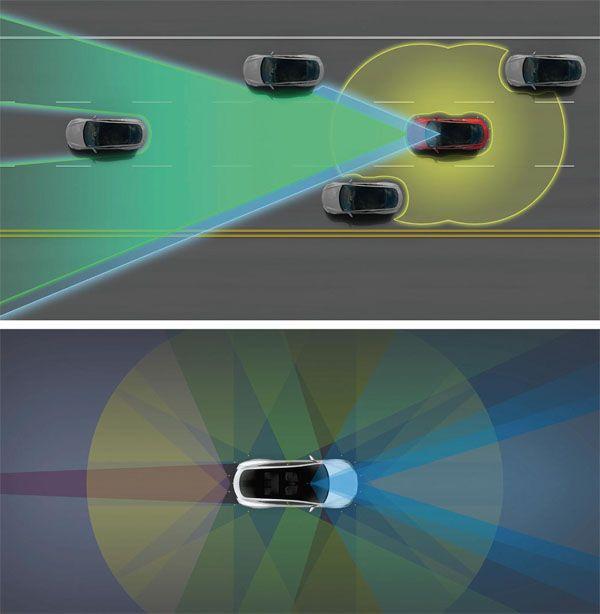
智能汽车眼睛谁来当呢?视觉方案模仿的是人眼,主要是靠“看”,相当于一个二维照相机。雷达方案模仿的是蝙蝠,是立体的“扫”,相当于一个三维照相机。视觉方案的好处在于,已经相对成熟。以摄像头主导、配合毫米波雷达等低成本元件,构成纯视觉计算,可以满足当前L2级自动驾驶的需求,典型代表就是特斯拉。
但摄像头拍下来的毕竟是二维图像,相比三维信息更难挖掘,需要更强大的算法、大量数据的训练和更长期的研发投入,并且会存在精度、稳定性和视野等方面的缺陷,暂时无法满足L3级以上的自动驾驶要求。
雷达方案可以创建出清晰的3D图像,通常看得更远,看得更清晰,抗干扰能力也更强,可以满足L3级以上的自动驾驶要求,但成本也更高。通常以激光雷达主导,配合摄像头、毫米波雷达等元件,典型代表为谷歌Waymo、国内的百度Apollo。
激光雷达的原理简单来讲就是激光雷达的发射器发射出一束激光,激光光束遇到物体后,经过漫反射返回至激光接收器,雷达模块根据发送和接收信号的时间间隔乘以光速,再除以二,即可计算出发射器与物体的距离。同时,反馈回来的轮廓信息组成所谓的“点云”并绘制出三维环境地图,精度可达到厘米级。
根据结构,激光雷达分为机械式、固态式和混合固态式三种,可以说是传统版、高配版和市场版三种路线。
機械式激光雷达当前技术最为成熟,它主要分为1线,4线,8线,16线,32线,64线,128线等,线数越大,激光雷达的性能就越高。传统的机械激光雷达结构复杂,体积大,成本高,想实现大规模量产变得十分困难。此外,这种雷达里面机械部件太多,调试装配复杂,生产周期长,并且机械部件在真实路况下比较容易损坏,难以符合车规的要求。
固态式激光雷达属于“高富帅”版,目前固态雷达从技术方案的角度上可以分为MEMS微机电、OPA和FLASH三种。MEMS激光雷达也就是常说的混合固态激光雷达,因为其内部仅需一束激光光源,用“可动”的微镜面来反射光线,因此这张激光雷达兼具“固态”和“运动”两种属性,故得名混合固态。其优点在于体积小,成本低,但可靠性仍有待验证。
OPA系统则使用一个光学相位调制器用来控制通过透镜的激光的速度,从而控制光的波面形状,以此来消除机械运动部件。采用OPA技术的代表厂商为美国的Quanergy,其最新的OPA激光雷达产品为S3-2。
Flash激光雷达的原理非常接近于使用Flash的数码相机,通过同时照亮一大片区域,在焦平面阵列(FPA)上获取所产生的像素距离讯息。其优点在于采集率很快且免疫振动因素,但缺点是难以避免环境中其他反射镜的影响,而且照亮整个探测场景和远处物体需要很高的激光功率。Flash激光雷达中最为知名的是比利时厂商Xenomatix,其下Xenolidar系列是无须经过扫描的激光雷达,只需“一次闪光”就能检测整个场景,但又不会受到短距离和高功率的限制。
随着未来自动驾驶技术的进一步普及,激光雷达市场规模将会进一步扩大。咨询机构Yole预计,2025年全球激光雷达出货量约470万个,销售额约61.9亿美元。激光雷达看起来这么美,为何各家车企却并不见得对此有多狂热呢?说白了,现在车上装激光雷达,账还是有点算不过来。
马斯克曾说“激光雷达,免费他都不用”,他想从算法上解决视觉信息的处理问题。他的理由也很简单,马斯克认为车和道路都是为人类设计的,人的视觉加大脑处理信息的模式可以安全行驶,那么自动驾驶也可以做到。雷达是人都不具有的感官,为什么要装,这不是正常人拄拐杖,多此一举吗?
但更可能让马斯克看不上的原因是当前激光雷达成本高昂,是视觉解决方案的十倍以上。以Velodyne的激光雷达为例,16线束的激光雷达需要约4000美元,64线束的更是高达8万美元,相比之下,摄像头自动驾驶的硬件成本才几百美元。一个激光雷达价格顶得上两辆Model 3,这种烧钱东西,马斯克自然不感冒。
小鹏则在考虑打安全牌来和特斯拉竞争。小鹏声称之后要采用摄像头+毫米波雷达+超声波雷达+激光雷达的融合方式来搞自动驾驶,简单来说就是加满装备跑得更快更稳更安全。可即使激光雷达能满足L3以上级别的自动驾驶要求,高昂的成本,小鹏汽车又该如何应对呢?
小鵬自己的答案是其一直在培养自己的供应商,通过提升订单量可以大幅降低制造成本,也可以增强自己的议价能力。但除了这个答案之外,显然华为的入局是一个不可忽视的外部变量。就在小鹏和特斯拉互怼之际,华为也透露在研究激光雷达,目标是短期内开发出100线的产品,并在未来将成本降至200美元,甚至100美元。华为轮值董事长徐直军还声称,“特斯拉现在能做到的事情,我们都能做到”,正在将华为的兵团作战应用于激光雷达。
按正常的思维来看,小鹏直接挑战低价激光雷达可能有点悬,但华为的入局让这场争论出现变局。此外,今年8月大疆宣布可以量产千元级别车用激光雷达,适用于L3、L4级别自动驾驶。Horizon和Tele-15的价格分别只要6499和9000元,相比于Velodyne的几万、几十万元已经非常便宜了。此外,禾赛光电、速腾聚创等都是国内比较好的激光雷达供应商。如果未来一两年激光雷达价格大幅下降,“免费也不用”的特斯拉仍然继续坚持自己的视觉方案,可能真够马斯克喝一壶的。
不管是华为还是其他厂商,要参与这场竞争,大致都会分三步走。第一步,以高产品性能的机械旋转激光雷达,入手无人驾驶市场。该市场客户多为头部科技公司,对成本敏感度低、性能要求高,可根据客户反馈和技术迭代,加深对系统理解,积累开发经验,形成技术护城河,同时实现较高毛利率的销售收入、占领市场份额、积累品牌口碑。第二步,根据产品累计的需求,自研芯片,增加产品集成度和降低成本,进军客户分散、性能要求低、成本敏感度高的服务机器人市场,以及开发周期漫长、对集成度、可靠性、成本、规模化生产要求严苛的ADAS乘用车市场。第三步,研发感知算法、即时定位与高精地图构建、感知数据管理平台,进军车联网市场。
当然激光雷达也不是完美的,应用中也存在着不足。比如大雾和大雨会减弱激光信号的强度,精度会下降,并且现在的激光雷达的点云是基于几何呈现的,虽然能分辨出形状,但却不能辨别颜色和纹理等,这意味着激光雷达还无法区分纸袋和石头的不同。激光雷达配合其他传感器的整体方案可能才是应用方向。
在智能驾驶产业链的三个层面中,环境感知主要对应的是摄像头、雷达(包括超声波、毫米波、激光雷达);计算决策主要对应的是计算芯片、感知算法、高精地图、通信技术等方面:而控制执行则是制动系统、转向系统、电机系统等方面。海外厂商存在先发优势,国产势力也正逐步崛起。
智能汽车是硬件+软件的结合,当前世界的头号玩家就是中美两国。特斯拉与中国新势力的竞争,也是中美硬件、软件科技人才的竞争,也是美国开放合作和中国大兵团作战的竞争。围观一场CEO直接的口水战,固然乐趣十足,但背后的技术路线之争,才会给我们的生活带来更深远的改变。
有意思的是,这段时间国内新能源汽车厂商推出的新品像是约好了一般,都配置了激光雷达。长城汽车WEY品牌发布了“咖啡智能”平台的首款落地车型“摩卡”,并称在这款车型上搭载了激光雷达。蔚来汽车对外称首款电动轿车ET7将搭载激光雷达。未来,可能并不遥远。
猜你喜欢
电脑报(2022年16期)2022-05-06
中国慈善家(2022年2期)2022-04-13
环球时报(2022-04-06)2022-04-06
环球时报(2022-03-05)2022-03-05
汽车观察(2021年8期)2021-09-01
汽车观察(2021年11期)2021-04-24
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
汽车观察(2020年9期)2020-10-27
中国计算机报(2019年49期)2019-02-07
