日光温室辣椒机械化移栽可行性研究
2021-03-12 09:54:14刘娜王彦赵晨阳郭俊先
中国农业科技导报 2021年2期
刘娜, 王彦, 赵晨阳, 郭俊先
(1.新疆农业科学院农业机械化研究所, 乌鲁木齐 830091; 2.新疆农业大学机电工程学院, 乌鲁木齐 830052)
新疆维吾尔自治区和田地区属于典型的干旱荒漠性气候,沙漠与沙漠化土地较多,大田种植的作物成活率极低,因此该地区多开展在日光温室内种植,结合沙漠地区日照时间长、少雨少雪的特性,使得该地区的日光温室在经济性和规模上都有一定优势[1-5],但是和田地区人口较少[6],严重制约了日光温室的发展,急需发展机械化作业。
日光温室是节能日光温室的简称,又称暖棚,具有造价低、保温性能好、节能降耗、维护简单等特点,冬季太阳高度较低,日出在东南,日落在西南。为了在冬季最大限度地利用阳光,日光温室多采用座北朝南、东西延长的方位[7-10]。传统的日光温室多采用南北垄向栽培,该模式下作物的光能利用较好,且布局更为合理简便,作业要求低,温室内空间利用率高。但该模式下,垄的数量多、长度短,同时,温室内空间狭小,农机作业时存在‘头难调、门难进、路难走、边难耕’等诸多问题,为了适应机械化发展,部分地区开始采用东西垄向的种植方式。近年来,学者们对于垄向的作用观点不一,有的认为改变垄向不会对作物造成影响[11],有的则认为南北垄向更好[12-13],还有认为东西垄向更优[14-16],此类研究主要集中在大田生产上,对日光温室的研究较少,且内容大多与农艺性状相关,忽略了实际生产时采用机械化种植对作物的影响。
目前,辣椒是和田地区温室蔬菜,本文选择辣椒作为研究对象,使用2ZYZ-2型自走式移栽机在和田地区日光温室内进行了机械化种植试验,寻找适宜机械化种植的作业参数,并对机械种植模式与传统人工种植模式之间的差异进行了比较,分析和田地区日光温室的机械化种植的可行性,为和田地区的农业发展提供参考。
1 材料与方法
1.1 试验材料
试验所用日光温室位于和田市吉亚乡金叶村(79.72°E,37.33°N)塔克拉玛干大沙漠南边,地势南高北低,平均海拔约1 300 m,年平均气温11.5 ℃,极端最高气温41.9 ℃,最低气温-23.9 ℃;多年平均降水量35.1 mm,年潜在蒸发量2 595.3 mm,干燥度为20.8。日光温室为全钢架圈梁结构,由国家烟草总局出资,京和纺织有限公司建造,跨度9 m,长60 m,高5.6 m,种植面积480 m2。墙体为保温被,外部材质为PVC,内部材质为太空棉,透明覆盖材料采用EVA双防膜。
试验所用辣椒品种为大果60,由日月蔬菜种子有限公司生产,在和田地区吉亚乡金叶村的日光温室内培育,定植苗龄为50 d。种植时采用典型的沟垄模式,每个大棚准备牛羊粪便10 m3,加入发酵菌调整水分含量60%左右,每7 d堆翻一次。种植前,平整土地施入发酵好的牛羊粪便与适量有机肥(过磷酸钙30 kg,复合肥30 kg),使用旋耕机将底肥均匀混入土壤中,旋耕深度为25 cm。处理后土壤pH为7.7,有机质31.95 g·kg-1,水解性氮105 mg·kg-1,有效磷193 mg·kg-1,速效钾306 mg·kg-1。
1.2 试验设备
2ZYZ-2型自走式移栽机(昆明顺吉科技有限公司)、新沃1GQN-140型旋耕机(宁晋县新沃旋耕机械有限公司)、YT10-A多功能田园管理机(无锡悦田农业机械科技有限公司)、泰鸿TH604-3轮式拖拉机(潍坊泰鸿拖拉机有限公司)、BPG-9140A精密鼓风干燥箱(广州永程实验仪器有限公司)及YP-5002型电子天平(北京中西远大科技有限公司)、钢卷尺、游标卡尺等。
1.3 试验设计
作业前首先确定2ZYZ-2型自走式移栽机的最佳参数,行进速度为1.0 km·h-1时作业人员的失误率与作业效率均处于较优水平,但移栽深度以及作物间距对定苗数以及植株环境影响显著,需进行种植试验。
将单个大棚的有效产量作为响应值,植株的行距、株距、移栽深度作为影响因子(表2)进行响应面试验,通过方差分析得到回归模型并进行显著性检验,最后利用Design-Expert中的optimization确定最优的试验方案。
试验在金叶村C区001~017号日光温室内进行,种植行向为适宜机械化作业的东西走向,灌溉施肥措施相同,定植后75~80 d统一采收,统计每个试验片区辣椒的有效产量。有效产量为剔除外形不达标的辣椒果实后,剩余具有经济价值的果实产量,由当地具有丰富经验的工作人员进行人工筛选。
1.4 机械种植模式与人工种植模式对比试验
于2019年7月10号在金叶村内的C006、007号棚内开展,人工种植棚南北垄向,机械种植棚东西垄向。

注:1—供苗系统;2—机架;3—植苗系统;4—液压调节系统;5—轮边减速器;6—主动轮;7—发动机;8—从动轮;9—动力传输系统。Note: 1—Seedling supply system; 2—Frame; 3—Seedling system; 4—Hydraulic control system; 5—Wheel reducer; 6—Driving wheel; 7—Engine; 8—Driven wheel; 9—Power transmission system.图1 2ZYZ-2型自走式移栽机结构Fig.1 Structure of 2ZYZ-2 self-propelled transplanter
1.4.1种植参数确定 移栽深度6 cm、行距30 cm、株距40 cm,垄高20 cm,垄宽60 cm,过道长35 cm,东西垄向使用2ZYZ-2型自走式移栽机完成移栽作业,南北垄向采用人工种植。记录两个种植棚内的有效产量并考察植株的生长状况及果实的品质。

表2 试验因素水平表Table 2 Factor level table
1.4.2株高茎粗测定 使用对角线法在温室内划分10个小区,每个小区内选择10株样本采集数据,总样本数为100株,测量定植后5(幼苗)、35(开花坐果)、70 d(成熟)时辣椒的株高、茎粗。
1.4.3植株物质积累量测定 收获期每个小区选择5株样本,总样本数50株,清洗后将地上与地下部分分开,测量其鲜重后放入鼓风干燥箱,105 ℃烘干至恒重,测量其干重后计算其根冠比。
1.4.4有效产量及果实品质 于定植后75~80 d进行采收,筛选方式与种植参数试验相同。每棚随机抽取100个果实测量其果型参数与营养成分,成分检测于普尼测试集团股份有限公司乌鲁木齐试验室内进行,辣椒素的测定方法参考国家标准[17-20]。
使用Excel对试验结果进行整理,利用Originlab进行方差分析以及图像绘制。
2 结果与分析
2.1 移栽机种植参数分析
2.1.1回归模型与显著性分析 试验方案及结果如表3所示,不同方案的有效产量在1.422~2.611 t之间,移栽深度6 cm、行距30 cm、株距40 cm组合方案表现均较优。
对试验结果进行方差分析得到拟合方程为:有效产量Y=2.54+0.14X1+0.2X2+0.071X3+0.055X1X2+0.022X1X3+0.2X2X3-0.41X12-0.5X22-0.25X32,R2值为0.98,表明该模型可以拟合98%以上的试验结果。试验因素对每个大棚有效产量的影响显著顺序为:行距>移栽深度>株距。
2.1.2交互因素影响分析 图2为因素交互作用的响应面曲线。三个因素对响应值的影响均为先增后减,移栽深度过大不利于滴灌模式下植物对水肥的吸收,过小则导致植株易被吸热性较强的沙土烫死;株行距的变化影响了植株冠层内的光照、温度、湿度、CO2浓度等微环境,同时也决定了温室的种植密度。行距与株距的间交互作用较为明显S3(6,X2,X3),响应面曲线沿行距变化比沿着株距方向变化更快,可知在移栽深度在零水平时,行距对有效产量的影响更为显著。
2.1.3移栽机最优作业参数验证分析 软件所得最优作业参数为:移栽深度6.38 cm、行距32.64 cm、株距42.55 cm,预测有效产量2.59 t。实际操作时将最优方案取整为:移栽深度6 cm、行距为30 cm、株距40 cm。进行了三次验证试验,结果取平均值,测得的有效产量2.48 t,相对误差为4.25%,基本达到预期目的,参数模型较为合理。
2.2 机械化与人工栽植效果对比
对两种种植模式下的栽植合格率进行了测定[21-22],试验参数下,2ZYZ-2型移栽机(作业人数1人)的平均栽植频率为111.2株·min-1,人工种植(作业人数4人)的平均栽植频率为123.8株·min-1,由于栽植作业劳动强度较大,工人需要频繁休息,人工种植所需工作时间远高于理论时间,相较机械化作业效率较低。
机械移栽的株距、行距变异系数均低于人工移栽,栽植深度合格率高于人工移栽,说明2ZYZ-2型移栽机相较人工有着更高的栽植精度。测量时发现,机械作业存在漏栽、伤苗现象,在人工作业时几乎没有出现,这是人工移栽的优势,同时也是移栽机今后改进的重点。

表3 试验方案及响应值Table 3 Test scheme and response value

表4 方差分析Table 4 Variance analysis

图2 交互作用的响应面Fig.2 Response surface of interaction
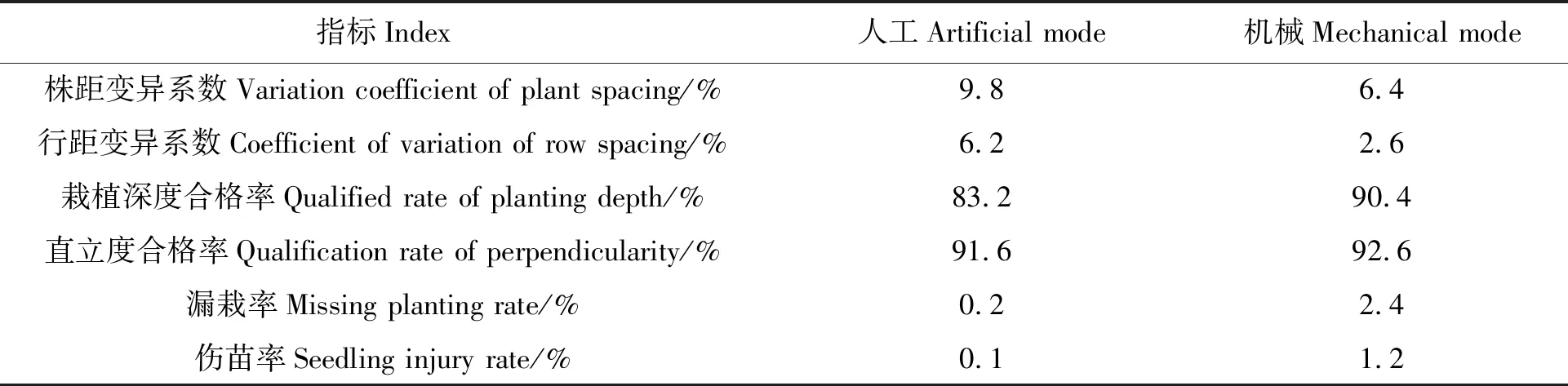
表5 人工和机械模式栽植效果对比Table 5 Comparison of planting effect between artificial and mechanical modes
2.3 不同时期辣椒生长状况对比
辣椒植株参数如表6所示,在植株外形方面,5 d时辣椒植株涨势基本相同。35、70 d时,人工种植模式的辣椒植株高度高于机械化种植模式,增长幅度分别为4.1%和3.95%;机械化种植模式的辣椒茎粗高于人工种植模式,增长幅度分别为5.72%和3.63%,两种种植模式下辣椒植株的株高与茎粗差异较为显著(P<0.05)。在生物积累量上,两种模式下的植株地下部分差异不显著,机械化种植模式的植株地上部分的生物积累量显著高于人工种植模式,根冠比显著低于人工种植模式,辣椒作为收获地上部分为主的作物,较低的根冠比表明机械化种植模式的辣椒性状更为合理。推测造成这种情况的原因是东西垄向光照条件更好,对辣椒的生长素抑制作用更强,使得茎杆的伸长受到抑制,株高较低;同时更好的光照也意味着植株的光合作用更强,因此茎秆更为粗壮,干物质积累量也更多。
2.4 产量及果实品质比较
机械化种植模式的有效产量为2.38 t,人工种植模式的有效产量为2.14 t。机械化种植模式产量与模型预测值相差8.82%,表明模型较为可靠;相比人工种植模式增产11.21%,表明机械化种植模式在产量上优于传统的人工种植模式。
果实外形及营养成分测定结果如表7、表8所示,两种模式下的辣椒果实在外形上不存在显著差距,外观品质为同一水平。
营养成分测定表明,人工种植模式的辣椒,辣椒素含量高28.57%,维生素C含量高41.19%,可溶性糖含量高3.31%,粗纤维含量高10%;两种种植模式下的辣椒的氨基酸组成差异不显著,天冬氨酸与谷氨酸在辣椒中含量最高,占氨基酸总量的40%左右,机械化种植模式的辣椒氨基酸总量比南北向高20.73%,其中人体必需氨基酸含量比南北向高10.63%,人体非必需氨基酸含量比南北向高25.6%。由于营养成分的组成决定了辣椒的风味[23],因此认为两种模式下的果实风味存在差异。
为了进一步了解这种差异对经济性的影响,召集当地工作人员共50人对辣椒进行了感官评分,人工模式得分13.3±2.4,机械模式得分14.1±3.3,表明两种模式下辣椒果实的感官评分没有显著区别,可以认为这种口感的差异不影响其经济性。
3 讨论
受限于和田地区独特的气候条件,日光温室在和田地区农业生产中占有及其重要的地位,随着城市化进程的加快与劳动力成本的提高,机械化已经成为不可逆转的大趋势,但温室复杂的结构特点与传统的作业方式极大的限制的农业机械的使用,近年来,多位学者针对这一问题展开了研究:杨小龙等[24]对番茄在日光温室内进行东西与南北垄向的研究,发现产量不存在显著性差异;魏珉等[25]同样选择番茄进行研究,表明相同株行距,东西垄向的产量高于南北垄向,部分处理存在显著差异;刘攀等[26]选择草莓进行研究,发现东西垄向种植的草莓不仅产量提高了13%,还具有更好的品质与更短的收获期。垄向的研究旨在解决温室内机械化作业的难题,但现有的研究多集中在农艺性状上,所得的种植模式并不能很好的与农机结合,实践作业时往往会产生诸多问题,本研究在确定的农机参数上开展了种植试验,大大提高了研究的可靠性。

表6 辣椒植株性状Table 6 Plant parameter of pepper

表7 果实外形及品质指标Table 7 Shape and quality index of fruit

表8 氨基酸含量Table 8 Amino acid content
目前,包括本研究在内的多项结果均证明,在日光温室内采用东西垄向并不会降低作物的经济价值。机械化种植模式在不改变经济性的同时,大大提高了作业效率,减少了劳动力的浪费,这充分说明在和田地区日光温室内进行机械化移栽是可行的,本研究所得的种植模式可以为和田地区的农业生产提供理论和实践依据。
猜你喜欢
农业知识(2022年9期)2022-10-13 08:25:50
新农民(2021年15期)2021-09-16 09:47:57
民族古籍研究(2018年1期)2018-05-21 00:40:20
西藏农业科技(2018年4期)2018-04-25 06:39:26
现代园艺(2018年2期)2018-03-15 08:00:04
现代园艺(2017年22期)2018-01-19 05:06:54
安徽农业科学(2015年33期)2015-03-19 06:44:16
新疆农垦科技(2014年8期)2014-02-28 19:20:40
湖南农业科学(2014年20期)2014-02-27 14:32:55
双语教育研究(2014年3期)2014-02-27 06:44:34