
ETCS开口速度研究
2021-03-09 01:34刘栋青田宏达
铁路通信信号工程技术 2021年2期
刘栋青,张 韦,田宏达
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
在信号设计时列控系统中对列车的制动曲线分为开口速度监控和不设开口速度监控两种方式。CTCS 中采用不设置开口速度的监控方式,但城轨点式系统和ETCS 系统中均使用了开口速度监控方式。了解开口速度的设计与计算方式,可以加深对信号系统中列车制动曲线监控方式的理解。在讨论开口速度前,需要先了解欧标行车许可的结构和特征。
2 定义
2.1 行车许可
行车许可也叫移动授权(Movement Authority,MA)。MA 包括以下信息:
1) 行 车 许 可 终 点(End of Authority ,EOA);
2)从最近相关应答器(LRBG)开始到行车许可终点的轨道区段及其首次超时值。首次超时值用于判定区段是否超时,其设定和超时后列车未进入进路时联锁能及时解锁相关进路以便提高效率有关。
3)末区段相关信息。末区段终点可能是危险点或保护区段(Overlap)终点。取决于联锁使用何种方式进行进路的安全防护。末区段超时后,能取消被列车占用的末区段。
4)开口速度实际上是一种特殊的列车顶棚速度限制,作用于EOA,速度值与EOA 和危险点或保护区段终点的距离有关。
车载设备在进行目标速度距离监控时,目标点通常有两个:应用常用制动的EOA 和应用紧急制动的SvL。所谓的SvL(Supervised Location)按先后顺序应该是以下的3 类:保护区段终点(如果存在保护区段并且保护区段锁定未超时);如果不存在保护区段,则为危险点;如果不存在危险点,则为EOA。
危险点即为列车在没有安全风险前提下能达到的位置,通常为前方最近被占用的区段起点(固定闭塞或准移动闭塞)或前方最近列车最小安全后端(移动闭塞)或警冲标等可能造成道岔冲突的位置。
2.2 过走防护
过走防护是一种当列车在制动停车过程中如果因为某种原因越过行车许可终点后,由地面设置来保证列车安全的技术。
过走防护实现原理是在列车进路的末端事先设计一段固定区段,即保护区段。列控系统从联锁系统收到该进路信息后,发送给车载ATP 的行车许可能确保列车安全。
如果列车因故(司机有可能误判列车停车点)越过EOA,车载ATP 设备采取紧急制动等措施,迫使列车紧急停车。保护区段的长度需保证在与保护区段有关的开口速度顶棚限制下(如果有的话)采取紧急制动后能保证列车不冒进最终的危险点,否则有可能引发撞车事故,保护区段的长度与工程、车辆配置及线路坡度等因素有关。
2.3 开口速度
开口速度的设置可能有以下两种原因。
1)EOA 的允许速度为0,但这个速度限制在列车位置的置信区间比较大的情况下显得过于严苛。
2)在ETCS1 级列控系统下,当信号清除行车许可耗尽时需要列车有能力越过应答器。
对于第一种原因来说,在CBTC 系统中,列车进站时,如果不在出站信号机外方设置保护区段将EOA 和危险点隔开,通常会因为ATO 在低速时遇到过于严苛的EOA 附近的速度限制而完成不了精确停车。
在CBTC 列控系统中,保护区段是为实现超速防护,保证安全停车而延伸的闭塞区段。城轨的CBTC 系统中设置保护区段的目的之一是为了使列车在 ATP 防护下能够尽量靠近预定停车点实现精准停车。
ETCS 里的开口速度设置也和CBTC 系统中的保护区段设置有着异曲同工之妙,因为列车包络而无法更可能的接近EOA,会从而降低列车进站效率。这也同样是为了防止列车包络在过于严格的速度限制中产生负作用。
对于第二种原因来说,如果应答器安装在EOA附近,会因为列车包络而无法接近EOA 读取应答器,从而无法延伸MA 继续前行。
3 措施
列车在越过EOA 后会采取冒进措施,设置SvL的目的在于即使列车越过了EOA,采取了冒进措施,列车也会因为紧急停车停在SvL 之前。采用开口速度的列车制动曲线举例,如图1 所示。
按照subset-026,列车在越过startRSM,即进入RSM 监控之后,如果列车速度小于开口速度,则车载ATP 不会进入干预状态。如果列车速度高于开口速度,则车载ATP 进入干预状态,采取紧急制动,这样就能保证列车不越过SvL。
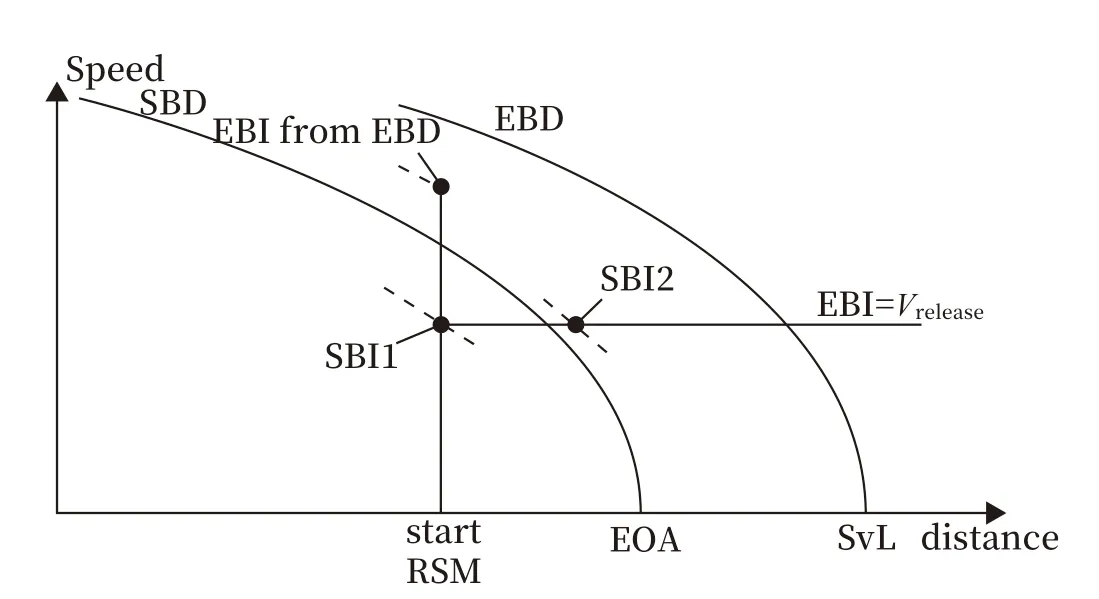
图1 采用开口速度的列车制动曲线Fig.1 The train braking curve with release speed
也就是说,如果必须保证对SvL 的防护,则开口速度应由车载设备计算,并且当列车执行冒进防护时,将SvL 和列车最大安全前端之间的距离作为停车距离。或者轨旁设备给定的开口速度值应足够低,以便执行冒进防护时,任何类型的列车都能在SvL 的后方停车。
在ETCS 列控系统中,开口速度的提供方式有3 种:
1)轨旁设备直接发送给车载设备;
2)轨旁设备指示车载设备使用国家值规定的开口速度;
3)轨旁设备指示车载设备自行计算开口速度。
这3 种方式如何选择,需要根据线路条件、轨旁设备能力和车载设备能力,由轨旁设备通过MA相关字段的设置告知车载设备。如果由轨旁设备直接发送EOA 的开口速度或者使用国家值,则运营商需要确定列车使用这个固定的开口速度越过EOA不会有超过危险点的风险。
如果轨旁设备告知车载设备需自行计算开口速度,则需设计适当的算法根据车辆条件和线路条件计算。
4 算法设计
开口速度设置的背景就是因为列车有测速测距误差,导致EOA 允许速度为0 的限制过于严格,因此开口速度的计算与停车精度、测速误差、测距误差和保护区段长度有关。
既然开口速度就是在EOA 处的最高速度限制,那么车载ATP 计算的开口速度必须满足两个条件:
1)列车估计前端到达EOA 后,与EOA 有关的冒进位置和以开口速度加上测速误差、以切牵引时间和紧急制动生效时间前进的距离之和小于SvL点位置。
2)开口速度加上测速误差应尽可能接近目标点速度。
以上两个条件用subset-026 里的公式表示,即

其中冒进位置要考虑天线距离(等级1 下)和测距误差,即

如果车载计算开口速度,因为公式有不等式,因此实现比较困难,有两种实现方式。
4.1 查表法
如果制动曲线的实现是以查表法的形式,则可以轮询检查从startRSM(RSM 监控起点)到与EOA 有关冒进位置中间所有的位置,在该位置上与常用制动曲线的交点速度如果能够满足开口速度的两个条件,则可以设置其为开口速度。
4.2 逼近法
如果制动曲线的实现是实时计算的形式,则可以通过逼近算法,不断缩小速度区间,收敛两端极限值,如果其逼近值能够满足开口速度的两个条件,分辨率也满足条件,则可以直接设置其为开口速度。其中速度区间可以根据具体工程灵活配置,如果设备性能足够,则直接取线路最大速度即可。因为其分辨率在1 km/h 范围内,因此查找逼近值次数是十分有限的,不会对计算效率造成影响。
以上两种方式的使用场合取决于车载ATP 的计算性能和制动曲线的算法设计,并无绝对的优劣之分。
5 结论
目前我国的高速铁路上并未设置保护区段和开口速度。取消保护区段能减少股道有效长度,缩短车站长度,减少车站建设成本。但根据前面的分析,采用过走防护技术可以提高列车运行的安全度,而采用开口速度则可以在过走防护技术的前提下提高效率。
在中国高铁“走出去”的道路上,需要花力气加大海外信号系统标准的研究力度,尤其是对CTCS列控体系借鉴的欧洲铁路信号系统标准ETCS 体系中的关键子系统和关键概念的研究,有利于优化制动曲线监控模式,由此借鉴欧标信号系统对完善我国列控系统和信号制式也有着重要的意义。
猜你喜欢
家园·电力与科技(2022年2期)2022-03-26
云南画报(2021年11期)2022-01-18
铁道通信信号(2021年6期)2021-07-08
铁道通信信号(2020年1期)2020-09-21
科技视界(2020年8期)2020-05-18
科技视界(2019年10期)2019-09-02
安全(2018年10期)2018-10-19
科技创新导报(2016年9期)2016-05-14
中国科技纵横(2015年14期)2015-12-10
读者·校园版(2015年3期)2015-05-14
