无人机机载激光雷达在矿山地质测绘中的应用研究
2021-03-09 05:52李婷婷
中国金属通报 2021年22期
李婷婷,方 超
(黑龙江省第七地质勘查院,黑龙江 绥化 152000)
机载激光雷达通常使用无人机设备完成作业,当其在高空飞行达到指定高度时,通过发射激光光束,探测终端目标物体的空间位置与外形特征,以此实现矿山地质的测绘[1]。在此过程中,电脉冲通过激光设备对光束进行转化,实现激光光束转变成直接光束,并利用终端接收装置还原处理返回的目标光束,成为电脉冲,此时,将接收装置与计算机显示端进行对接,实现反馈的信息在显示屏幕上的呈现。目前,我国对激光雷达的研究已取得十分显著的成绩,并尝试其与无人机的结合,以此提高激光雷达的探测范围。同时,在操控无人机过程中,随时调整光束的照射方向,确保获取的信息满足实际工作的需求。
1 无人机机载激光雷达在矿山地质测绘中的应用
1.1 架设矿山地质测绘GNSS基站
为了确保矿山地质测绘工作的有序实施,架设GNSS基站,并根据矿山工程的实际测绘需求,在矿区内布设控制点。同时,对接i80接收设备与基站,使两者保持一种实时通信的状态。在此过程中,架设的GNSS基站需要满足下述要求:在架设基站前,提前定位控制点坐标,并在此基础上,对基站进行整平处理,确保测绘点与控制点处于对中状态;在进行基站天线高度测量时,采用斜测的方式,从脚手架的三个空档区域进行测量工作,并调整每个空挡区域之间的夹角成120.0°,并且在测量过程中,控制天线的高度与测板的测量结果精度在1.0mm范围之内,其误差小于4.0mm,并取多次测量结果的平均值作为最终结果。在上述提出的过程中,基站天线高度标准化测量方式如下图1所示。
按照上述图1中提出的方式,在完成对基站天线高度标准化测量后,调整基站的采样频率在3.0Hz~6.0Hz范围内。基站中所有的观测数据要有GPS定位点与BDS作为支撑,并且两者卫星数总和应大于或等于16.0个,并且在保存数据的时候,HCN格式与Renix30.25格式的文件各一份。
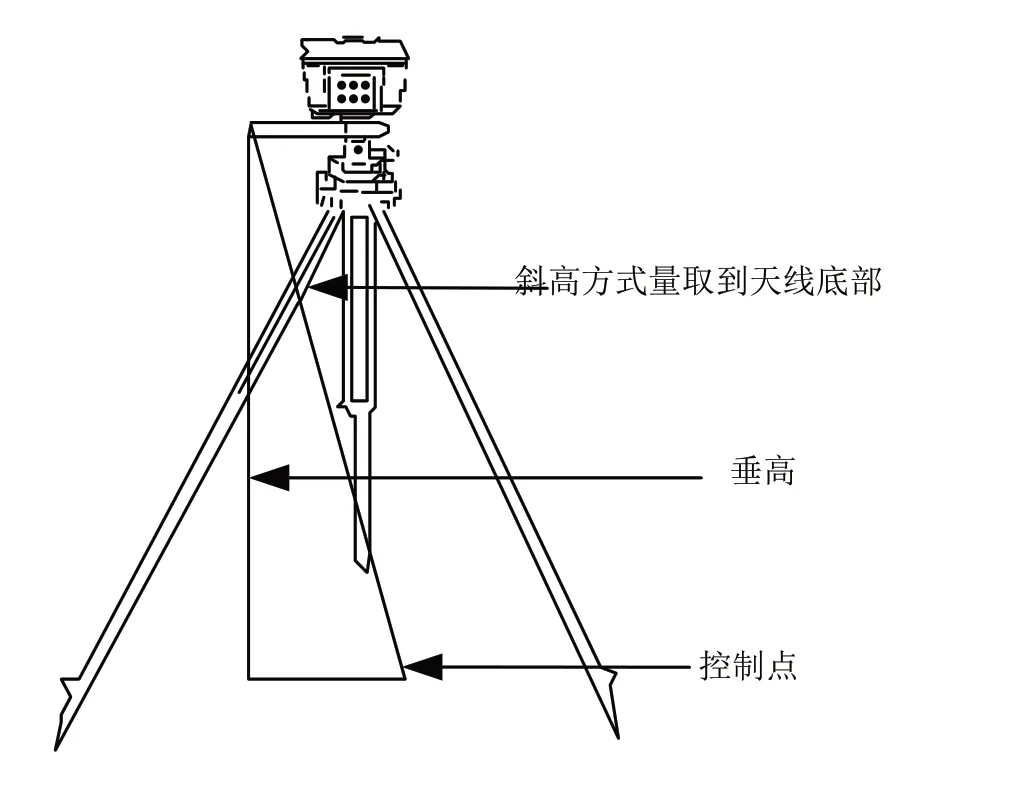
图1 基站天线高度标准化测量方法
在架设矿山地质测绘GNSS基站的同时,无人机调试技术人员应对基站现场环境进行勘察,并结合区域地质实际情况,使用Pro地面站仪器,对无人机机载激光雷达的巡航路径进行初步规划[2]。完成规划巡航路线后,使用3台无人机设备,探测预先设定的巡航路线,在所有的无人机设备均安全返回后,认为此时预设的航线符合无人机机载激光雷达测绘标准。综合上述分析,完成矿山地质测绘GNSS基站的架设与巡检路线的设定。
1.2 基于无人机机载激光雷达的数据采集与处理
在完成上述相关工作后,对无人机机载激光雷达的可持续续航与飞行状态进行检测,当多项指标均满足测绘条件时,进行无人机机载的标准化安装,从而通过此种设备进行矿山地质数据的采集。在采集数据过程中,需要多台手持控制设备对无人机的飞行方向进行控制与调整,并对接终端接收装置与无线通信装置,确保获取的信息可以有效传输到终端。无人机在高空飞行过程中,其飞行过程偏离预设轨道或超过8.0km后,终端发出预警。综合上述分析,规范化设计矿山地质数据的采集过程,具体内容如下。
设定无人机机载激光雷达的参数,包括激光扫描仪器的参数与拍摄录像设备的参数等。在测绘工作实施时,启用POS进行数据采集处理,待工程开始执行后,保持无人机机载激光雷达处于静止状态2.0min~3.0min,此过程的目的是获取更多的矿区静态信息,为后期的平差处理测绘数据做准备。在此基础上,控制无人机机载激光雷达按照“8”字形进行高空飞行,当设备处于一种稳定运行状态后,在终端计算机设备上进行测绘调控,同步开启激光数据采集工作与影像数据采集工作。在完成对矿山地质影像的获取后,控制计算机设备,点击“结束采集”功能按键,召回无人机机载激光雷达。当无人机机载设备平稳返回后,拷贝在此过程中的影像数据与相关信息,将数据存储在终端某指定硬盘内。在完成对矿山地质数据的测绘后,整理影像文件,归类数据信息,并且划分为四类,如下表1所示。

表1 无人机机载激光雷达获取信息分类
在完成分类处理获取的信息后,将存储在HCN内的原始信息进行格式转换操作,并设置信息的天线,使其生成标准的Renix30.25格式文件,此过程使用Data软件操作。
在完成上述处理工作后,使用Tial Explorer7.0软件工具,对图像进行处理,此软件适用于多种格式的文件信息处理,包括导航信息、重叠信息、误差信息等。处理过程为:新建矿山地质工程文件夹→转换原始数据格式→从终端添加基准站信息与移动信息→GNSS数据解算处理→Combine→图像平滑处理→导出图像处理结果。以此种方式,实现基于无人机机载激光雷达的数据采集与处理。
1.3 基于矿山地质点云数据的测绘成图过程
在完成获取影像信息的处理后,通过Pre软件将激光数据与POS数据进行深度融合,融合后按照标准的解算流程,将信息呈现在GCGS1000坐标轴下,生成一个支持las格式的矿山地质点云数据集合[3]。并按照对应的数据类型,分类矿山地质点云数据集合,最终生成一个符合矿山地质环境的等高线、高程信息点。处理过程为:矿山地质点云数据集合自动归类→结合工作人员实测点信息,对归类结果进行人工检测→使用计算机设备人工编辑采样结果→生成矿山地表层测绘点集合→构建数字化高程信息模型→生成点云分类结果。
在完成对点云数据的分类处理后,参照DEM模型对图像信息进行初步建模,并通过工作人员辅助操作的方式校正模型。手动分离处理生成模型中的不符合测绘工程的三角网,并将模型中未实现分离的三角网信息进行地面校正,直到构建的所有三角网均符合矿山地质工程测绘标准。针对其中突出的高程数据,采用校正软件分类等高线的方式,对其参数进行调整,并实现对所有网格的最小化处理,确保测绘结果的高精度。
在完成对测绘的点云数据进行高精度划分后,分离测绘数据集合中的等高线,定位线中关键点,使用CAD软件对测绘图像进行自动生成。生成过程中,可设置一个最小面积、等比例尺度与光滑强度等参数,生成图像过程中,所有的等高线均需要按照等高程比例尺进行缩放。按照不同点间隔,生成点云坐标,将所有坐标文件导入Cass软件进行编辑操作,以此实现测绘结果的成图。
2 实例应用分析
选择某矿区作为此次实例应用的场所,在实验过程,为了满足矿山工程实际需求,在开展相关研究工作前,由技术单位按照工作规定,向地方政府及有关部门进行空域飞行权限的申请,在取得工作申请后,将《GPS/IMU航空辅助摄像标准》文件作为此次工作实施的参照标准(文件要求测绘点误差在±1.0mm范围内,精度在1.0mm范围内)。
完成准备工作后,布设测绘点,此次实验共选择6.0个测绘点,如下表2所示。

表2 矿山地质测绘点
在完成对测绘点的布设后,使用高程比例尺对矿区地质图像进行缩放,并且通过无人机机载激光雷达按照文章中提出的方式,进行多点的影像采集,采集图像后,处理图像,并生成测绘点云图。在此基础上,整理测量的测绘数据,统计为表格,对照每个测绘点的高程数据精度与误差是否符合真实测量标准。如下表3所示。

表3 实验结果
结合上述表3中的数据可知,测绘结果的精度均在1.0mm范围之内,测绘点的误差均在±1.0mm范围之内,两者均满足《GPS/IMU航空辅助摄像标准》文件的要求,因此,本文方法具有实际的应用价值。
3 结语
截至当下,已有较多的理论研究表明,将无人机机载激光雷达应用到矿山地质测绘工作中,但是多数研究成果现今仍处于理论研究阶段,并未在实际中得到证实,并且,对于矿山工程而言,开展地质的测绘工作,获取矿区内的地势、环境、地层变化趋势等信息,是保证工作顺利实施的必要条件,但是由于矿山地质结构较为复杂,相关的测绘工作难度较大。因此,本文在早期研究成果的基础上,设计一种针对矿山地质的测绘方法,结合无人机机载激光雷达,实现矿山工程的质量与工作效率的同步提升。
猜你喜欢
汽车观察(2021年8期)2021-09-01
空间科学学报(2021年4期)2021-08-30
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
当代工人·精品C(2020年1期)2020-05-20
阳光(2020年5期)2020-05-06
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
电子制作(2018年16期)2018-09-26
汽车电器(2017年1期)2017-12-06