基于物联网多源协同感知井下精准定位算法研究
2021-03-08 09:41王钰宁周绍军刘晓霞
软件工程 2021年1期
王钰宁 周绍军 刘晓霞

摘 要:针对单一感知技术对矿井井下人员或设备定位存在的不足,本文提出一种基于物联网多源协同感知的矿井井下精准定位算法。首先对物联网井下感知定位系统框架进行设计;然后从多源多视角定位原理出发,提出基于物联网多源协同感知的矿井井下精准定位算法;最后将本文算法与参考文献算法进行实验和对比分析,得到各算法的定位置信概率与误差的比较曲线。通过实验和对比分析可知,本文算法具有一定的实用性和先进性。
关键词:精准定位;井下;协同感知;多源;物联网
中图分类号:TP76 文献标识码:A
文章编号:2096-1472(2021)-01-35-04
Abstract: This paper proposes a mine precise positioning algorithm based on multi-source collaborative sensing of the Internet of Things (IoT), aiming to improve single sensing technology for locating personnel or equipment in underground mines. First, a framework of IoT mine sensing and a positioning system are designed. Then, a mine precise positioning algorithm based on the multi-source collaborative sensing of the IoT is proposed from the principle of multi-source and multi-view positioning. Finally, experiments and comparative analysis are carried out between the proposed algorithm and the reference algorithm, and the comparison curve of probability and error of each algorithm at a fixed position is obtained. The proposed algorithm proves to be practical and advanced.
Keywords: precise positioning; mine; collaborative sensing; multi-source; Internet of Things
1 引言 (Introduction)
矿井井下安全是矿井生产的生命线,而井下安全最为重要的部分就是井下作业人员的安全。井下作业人员定位是确保井下作业人员安全的重要保障之一,并能对井下作业人员实时定位,为井下应急救援、人员作业管理以及矿井建设等提供重要位置信息[1]。物联网(Internet of Things, IoT)多源协同感知定位技术是利用物联网感知技术,如各种传感器、射频识别和全球定位等,实现实时采集、监控、连接、互动,进而达到物与物、物与人、人与人的泛在连接和物的智能化感知、识别和管理。但矿井有其自身特点,常规定位因无线信号的非直射径向误差和多径衰减等,导致定位精度低和适应性差等缺点,因此,必须采用先进的物联网多源协同感知定位技术,来改善和提高井下定位的精度和适应性等[2]。
对矿井井下定位的研究而言,国内外产业界和研究者进行了诸多研究和探索,其定位方法可分为邻近信息法、场景分析法和几何特征法等。其中几何特征法目前应用最广泛,又分为三边定位法、三角定位法和双曲线定位法[3]。无论何种定位方法,都离不开无线通信技术的支撑,矿井定位的无线通信技术主要有WiFi、RFID、UWB和ZigBee等。定位时使用精确的测距方式予以实现,而测距方法主要基于检测接收信号强度指示(Received Signal Strength Indication, RSSI)的测距模式,该模式以RFID、ZigBee、WiFi等无线通信技术为支撑;另一种是基于传输到达时间(Time of Arrival, ToA)和到达时间差(Time Difference of Arrival, TDoA)的测距模式,该模式以线性调频扩频(Chirp Spread Spectrum, CSS)及UWB(Ultra Wide Band, UWB)等无线通信技術为支撑[4]。矿井井下定位主要用于矿井作业人员或设备的定位,大多采用基于RSSI、ToA和TDoA测距的定位方法[5]。而到目前为止,研究者们对井下定位取得了新的进展,如文献[6]对地下开采岩体结构中的微震声源进行定位研究,提出一种基于解析迭代解的多传感源协同定位算法。
综上,现有研究未充分利用物联网技术,为矿井井下定位提高精确协同定位技术和方法等,有待进一步研究,以实现精确定位。因此,针对矿井现有定位方法存在的问题,利用无线超高频测距、惯性导航、多源混合定位与多源信息融合等技术,对其进行物联网多源多视角感知的协同精确定位方法研究,提出一种具有较高时间准确性和低环境影响率的精确定位算法,以实现井下作业人员和设备的精确定位、大型移动设备人员接近检测、采掘装备与井下搜救人员(机器人)自主导航与定位等服务。
2 系统架构(System architecture)
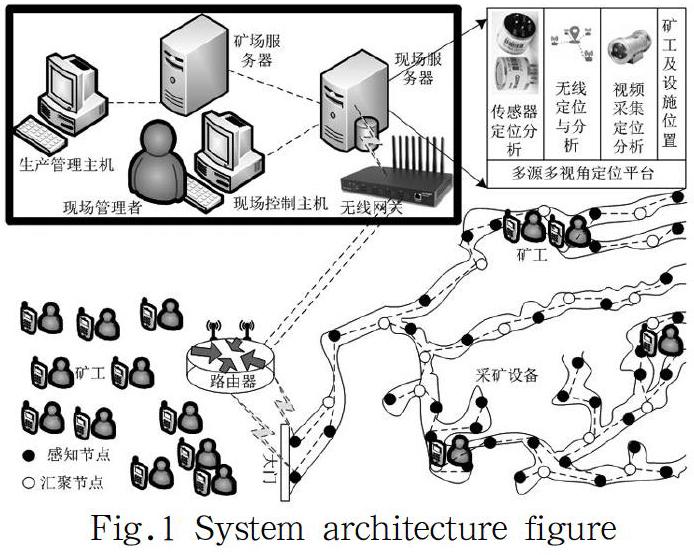
矿井井下有其自身的特点和特殊的要求,其能见度非常低,重岩坠落的可能性十分巨大,另外随时可能产生危险的易燃易爆有毒气体。矿井一旦发生事故,都涉及人员生命安全,其救援难度亦是非常大。因此,急需引入新的物联网技术,解决井下作业人员和重要设备设施的定位问题。物联网的发展和普及,为矿井井下定位提供了新的思路和范式,利用物联网多源多视角感知技术,可提供多源协同的精确定位服务,其系统架构如图1所示。
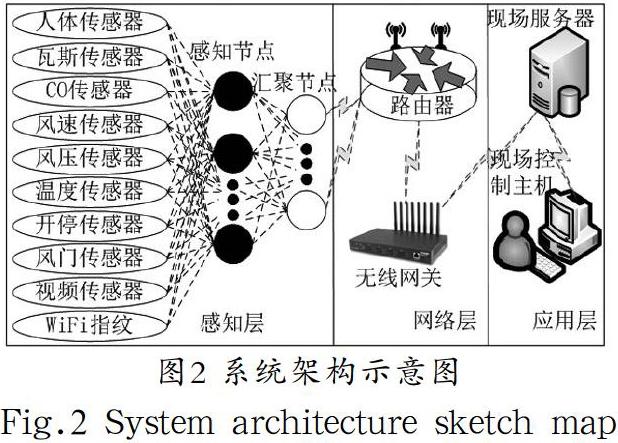
如图1所示,在矿井井下布置三类特性的节点,移动特性不强的大型设备节点、作业人员的动态感知节点和信息感知与传输汇聚节点。每个节点由多种感知态势组成,如信息感知与传输汇聚节点就集信息感知与传输汇聚于一体,一方面要实现实时的信息感知任务;另一方面要进行信息的传输汇聚,将控制和命令信息传输到井下作业人员和大型设备。这三类节点,起到两方面的作用,一是对人员和设备进行感知;二是对感知信息进行传输与交互的汇聚节点。因此,井下部署节点为感知节点和汇聚节点,人员为自身携带的感知设备构成感知节点。对图1进行形式化抽象,得到如图2所示的示意图。
由图2可知,感知层由各种传感器、感知节点和汇聚节点构成,其中传感器负责井下数据采集,感知节点主要对感知到的数据进行现场处理与发送,汇聚节点主要是传输井下感知数据、接收经网络传输来的应用命令和产生井下WiFi信号等[7]。感知层的传感器主要有井下传感器、视频传感器和井下人员的WiFi指纹及人体传感器;井下传感器主要有瓦斯传感器、一氧化碳传感器、风速传感器、风压传感器、温度传感器、开停传感器和风门传感器等,这些传感器中,与定位相关的为视频传感器、井下作业人员的WiFi指纹及人体传感器。网络层主要由路由器与井下汇聚节点进行通信,并与后端系统进行连接。应用层由井外传输网络和后端系统构成。后端系统通过网关与路由器进行连接,服务部分主要由现场服务器、矿场服务器和现场监控主机等构成,其中矿场服务器连接矿内各职能部门,以便进行矿区管理;现场服务器运行传感器定位、无线定位与分析和视频定位与分析的多视角协同定位算法。
3 定位算法(Positioning algorithm)
3.1 多源多视角定位原理
由图2可知,感知层的传感器中,与定位相关的传感器为视频传感器、WiFi指纹和人体传感器,其中人体传感器采用人体红外传感器,以感知人体离感知节点的距离。由此,得到多源多视角定位原理,如图3所示。
由图3,利用三维坐标系,可得:
其中,为点在三维坐标中的坐标值,为井下作业人员或设备的三维坐标值。由此,井下具有可感知定位装置的人员和设备,均可计算得到其与布置的感知节点和汇聚节点的垂直夹角,且。
如图3所示,节点N1和N2间的距离为r1,N2和N3间的距离为r2,通过节点N1、N2和N3可计算得到:
然后利用式(1)和式(2),可求得井下作业人员的精确三维坐标。同理可计算任意进入井下作业的人员的三维坐标。
3.2 定位算法
为确保定位精度,采用多样本特征提取技术实现实时在线井下作业人员及设备的精确定位。人员的特征提取来自视频传感器、WiFi指纹和人体传感器的实时数据,与井下位置三维位置地图数据库一起,映射到实时位置变换矩阵,得到实时位置特征,结合实时协同定位算法,一起输出精确的井下作业人员和设备设施的三维井下坐标,其过程描述如图4所示。
如图4所示,从原始多源感知数据集中提取含有位置特征的大量实时信息,来表征井下作业人员和设备实时位置的原始数据,然后与多源特征数据库结合,利用多源多视角精确协同定位算法,得到井下作业人员和设备的精确位置信息,以实现实时精确定位。其算法步骤如下:
第1步:依据采集到的信息,利用式(1)和式(2),得到原始位置信息数据集,并用向量来表示,其中为井下作业人员在处采集到的三个信息源的向量,N为参考点个人员的向量构成的矩阵维度为。
第2步:映射定义。定义映射,其中为参考点所在欧几里得空间,H为高阶希尔伯特泛函空间,利用核函数:
计算H中的内积;式(3)中,表示向量。
第3步:数据标准化处理。对数据进行标准化处理,得到新的标准化数据集而更新原数据集,其更新后为:
然后对由式(1)、式(2)得到的多源感知下坐标数据进行RSS(Root-Sum-Squares)序列均值化处理,即可得到M维实时特征向量;对M维向量数据进行本征维度处理,得到:
其中,为监测点附近的多传感器感知数据经式(12)处理后得到的个数;为距离的本征维度数。则式(13)即为被测点离感知点的最优距离。再利用式(1)、式(2)得到被测点的最优坐标值。
4 实验与结果分析(Experiment and result analysis)
實验在L型巷道中进行。如图5所示为实验测试使用巷道平面示意图,使用两种类型的节点,一种为感知节点,另一种为汇聚节点。实验时按照图1方式进行系统构建,被测对象为八位身高不一的同学,测得如表1所示每位同学所在点的三维数据。
对得到的实验数据,利用本文算法进行多源协同精确定位算法的计算,并与文献[8]—文献[10]进行对比分析,得到如图6所示的实验结果比较分析图。由图6可知,文献[8]和文献[9]的误差波动比较大,平稳性相对差一点,而文献[10]采用融合定位方法,得到的对比数据有波动,但相对于文献[8]和文献[9]而言,还是比较好的。本文算法定位平均误差较小,随着测试点距离初始位置变远,其误差会变大,但稳定性较好。
5 结论(Conclusion)
单一感知技术对矿井井下作业人员或设备定位存在不足,因此本文提出一种基于物联网多源协同感知的矿井井下精准定位算法。首先对物联网井下感知定位系统框架进行设计,得到多源井下感知定位的系统框架;然后从多源多视角定位原理出发,提出基于物联网多源协同感知的矿井井下精准定位算法;最后在校L型楼道进行实验,并利用本文算法进行多源协同精准定位,与其他方法进行了对比分析。通过实验和对比分析可知,本文算法在定位误差和执行概率方面,具有一定的优越性。
参考文献(References)
[1] Dong L, Zou W, Li X, et al. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining[J]. Engineering Fracture Mechanics, 2019, 210(4):95-112.
[2] Guo Jikun, Chen Sihan, Zhao Qing. Research on Optical Fiber Location System of Coal Mine Based on Φ-OTDR [C]. International Conference in Communications, Signal Processing, and Systems, CSPS, 2017:485-492.
[3] Ambarish G. Mohapatra, Bright Keswani, Shivani Nanda, et al. Precision local positioning mechanism in underground mining using IoT-enabled WiFi platform[J]. International Journal of Computers & Applications, 2020, 42(3):266-277.
[4] Firoozabadi A D, Azurdia-Meza C A, Soto I, et al. A Novel Frequency Domain VLC Three-Dimensional Trilateration System for Localization in Underground Mining[J]. Applied Sciences, 2019, 9(7):1-15.
[5]Rogers W. Pratt, Kahraman M. Mustafa, Drews Frank A, et al. Automation in the Mining Industry: Review of Technology, Systems, Human Factors, and Political Risk[J]. Mining, Metallurgy & Exploration, 2019(36):607-631.
[6] Dong Longjun, Zou Wei, Li Xibing, et al. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining[J]. Engineering Fracture Mechanics, 2019, 210(4):95-112.
[7] 汪金花,郭云飛,郭立稳,等.基于GRPM井下定位的MPMD匹配算法的试验研究[J].煤炭学报,2019,44(04):1274-1282.
[8] 沈辉,李世银.基于WiFi与PDR融合的井下定位方法[J].煤矿机械,2020,41(10):202-204.
[9] Karthikeyan A, Arunachalam V P, Karthik S. Performing Data Assessment in Terms of Sensor Node Positioning over Three Dimensional Wireless Sensor Network[J]. Mobile networks & applications, 2019, 24(6):1862-1871.
[10] 李宗伟,王翀,王刚,等.煤矿井下人员融合定位方法[J].工矿自动化,2020,46(1):59-64.
作者简介:
王钰宁(1982-),女,本科,讲师.研究领域:物联网数据感知与定位技术.
周绍军(1971-),男,硕士,副教授.研究领域:计算机应用技术.
刘晓霞(1976-),女,硕士,副教授.研究领域:计算机应用技术,物联网.
猜你喜欢
价值工程(2016年35期)2017-01-23
电脑知识与技术(2016年21期)2016-10-18
科学与财富(2016年28期)2016-10-14
环球时报(2016-08-01)2016-08-01
廉政瞭望(2016年7期)2016-07-28
科技视界(2016年5期)2016-02-22
黑龙江教育学院学报(2015年5期)2015-07-23