
城市轨道交通工程测量内外业一体化的思考与实践
2021-03-08 01:57:36卢其栋
河南科技 2021年36期
关键词:降本增效
卢其栋


摘 要:城市轨道交通工程测量传统作业模式的质量比较依赖员工的技术水平及责任心。随着测量机器人、电子水准仪等设备的普及,在移动通信技术的支撑下,测量外业实现记录电子化。测量记录通过移动网络传输至内业,形成内外业一体化的作业模式,有效提高工作效率,降低人力成本,实现了降本增效的目的。
关键词:城市轨道交通工程测量;记录电子化;内外业一体化;降本增效
中图分类号:P258 文献标识码:A 文章编号:1003-5168(2021)36-0090-04
Thinking and Practice on Integration of Office Work and Feild Work about Urban Rail Transit Engineering Survey
LU Qidong
(SGIDI Engineering Consulting(Group) Co.,Ltd.,Shanghai 200093)
Abstract: The quality of the traditional operation mode of urban rail transit engineering survey depends on the technical level and sense of responsibility of employees.With the popularity of measuring robots,electronic level and other equipment,as well as the support of mobile communication technology,the field measuring records are electronic,and the records can be transmitted to the office in real time via the mobile network,forming an integrated operation mode of office work and field work,effectively improving work efficiency,reducing labor costs,and achieving the purpose of reducing costs and increasing efficiency.
Keywords: urban rail transit engineering survey;electronic records;integration of office work and field work;cost reduction and efficiency increase
城市轨道交通是一项规模大、投资高、周期长的系统性工程,建设难度大。受城市规划、周边已有建构筑分布、地质条件等诸多条件的限制及城市轨道交通本身运行性能的要求,线路结构的走向和标高的精度要求较高。工程测量工作的有效性是城市轨道交通结构精确就位的前提和保障,城市轨道交通工程测量具有专业性强、精度要求高、及时性要求高等显著特点[1]。
传统测量作业模式质量过于依靠人工干预,受制于员工技术水平、责任心[2]。任何测量环节出错均导致返工,使测量周期成倍拉长;关键节点的测量验收时返工更会影响工程施工进度[3]。
随着测量机器人、电子水准仪的普及,以及高性能智能终端和移动通信技术的应用,城市轨道交通工程测量内外业一体化的作业模式是提高测量工作效率、降低出错率的有效途径。
1 内外业一体化测量的解决方案
工程测量包括外业测量、内业数据处理两个主要工序。传统的外业测量班组至少配备观测员1名、记录员1名、辅助人员2名。传统作业模式存在以下局限性:①高精度的测量需求,要求观测员具有丰富的观测经验。实践表明,不同观测员的瞄准、读数等仪器操作习惯会造成系统性误差;高强度、长时间的外业测量易造成视觉疲劳,导致观测精准下降;长线路测量时更易因误差累计而导致精度迅速降低[4]。②记录员的职业素质要求高。记录员现场记录观测数据,按测量规范的要求进行繁杂的测站数据计算和检查,以多测回测角为例,需记录多方向的盘左、盘右读数,计算归零差、2C差、测回差、平均方向值,要求记录员有快速的计算能力和较高的数据质量把控能力。记录员在长时间工作中难免会出现听错、记错等问题,导致测量原始数据有误。③内业计算前,测量班组应将原始手薄进行逐项核查,耗时费力。
对比传统作业模式的观测员与记录员的高强度配合,内外业一体化测量作业模式下,测量机器人、电子水准仪等设备通过蓝牙或通信线与智能终端(可为安卓、苹果等常见型号手机)连接,在测量APP软件支撑下自动观测,降低观测员的劳动强度,避免观测习惯带来的系统误差。APP同步按规范要求计算观测限差,保证外业观测质量。观测数据在移动通讯支撑下实时上传云端,内业人员从云端下载数据及时处理,将处理结果反馈至外业人员。对数据异常的部分再次进行现场验证,避免二次进场。一体化模式下,全流程数据“无纸化”“不落地”,有效地提高了外业、内业工作的互动效率,降低了劳动强度,达到降本增效的目的。
内外业一体化测量的软件支撑包含移动端APP及电脑端桌面软件两部分,软件为测量云APP及相应的桌面软件。该软件多测回测角、导线平差的基础功能目前可免费使用,报告定制等进阶功能需要付费使用。电脑端桌面软件是数据后端,可以支持数据下载、本次数据导入、数据解算与发布、数据管理等各项功能。
内外業一体化测量模式可以降低测量从业人员门槛,保证观测精度和成果质量,同时大幅度提高工作效率。详细工作流程见图1。
1.1 外业采集
内外业一体化的首要条件是实现外业记录的电子化。轨道交通工程测量运用较多的两种设备为全站仪和水准仪,电子水准仪能实现电子化记录。一体化测量的全站仪采用测量机器人,机器人自带驱动马达。在软件支撑下按需设置观测目标数量和观测顺序,可实现对目标的快速判别、锁定、自动照准和高精度测量,测量后自动存储测量数据,从而保证外业观测不受观测习惯带来的误差,数据质量稳定。手机软件交互性强、可视化高、兼容性强,可实时监控测量设备的工作状态和测量结果。
1.1.1 限差设置。软件通过内置测量限差实现对外业测量精度的控制。例如,控制网采用全站仪0.5″级别测角的限差设置,包括半测回归零差小于6″,一测回内2C互差小于9″,各测回互差小于6″[5],距离的限差设置半测回间距离较差为±1 mm,测回间距离较差为±1 mm,同时包括等级水准的视距差、两次读数差、尺长读数等。
1.1.2 学习测量。全站仪采用人工瞄准的方式测量第一测回,给测量机器人提供初始方位。测量机器人通过定向学习后,按技术要求的测回数和设定的观测模式进行自动测量,测量完毕后软件自动生成测站观测报告,质检合格后搬站。
全站仪测量成果存储于软件中,在移动通信的支持下,连接云端服务器,进行测量成果上传。电子水准仪观测结束后,上传测量数据至服务器中。
1.2 内业处理
内业处理系统集成了数据检查、报表输出、数据解算与管理等功能。
1.2.1 数据下载。内业处理人员直接从云端下载外业测量数据。
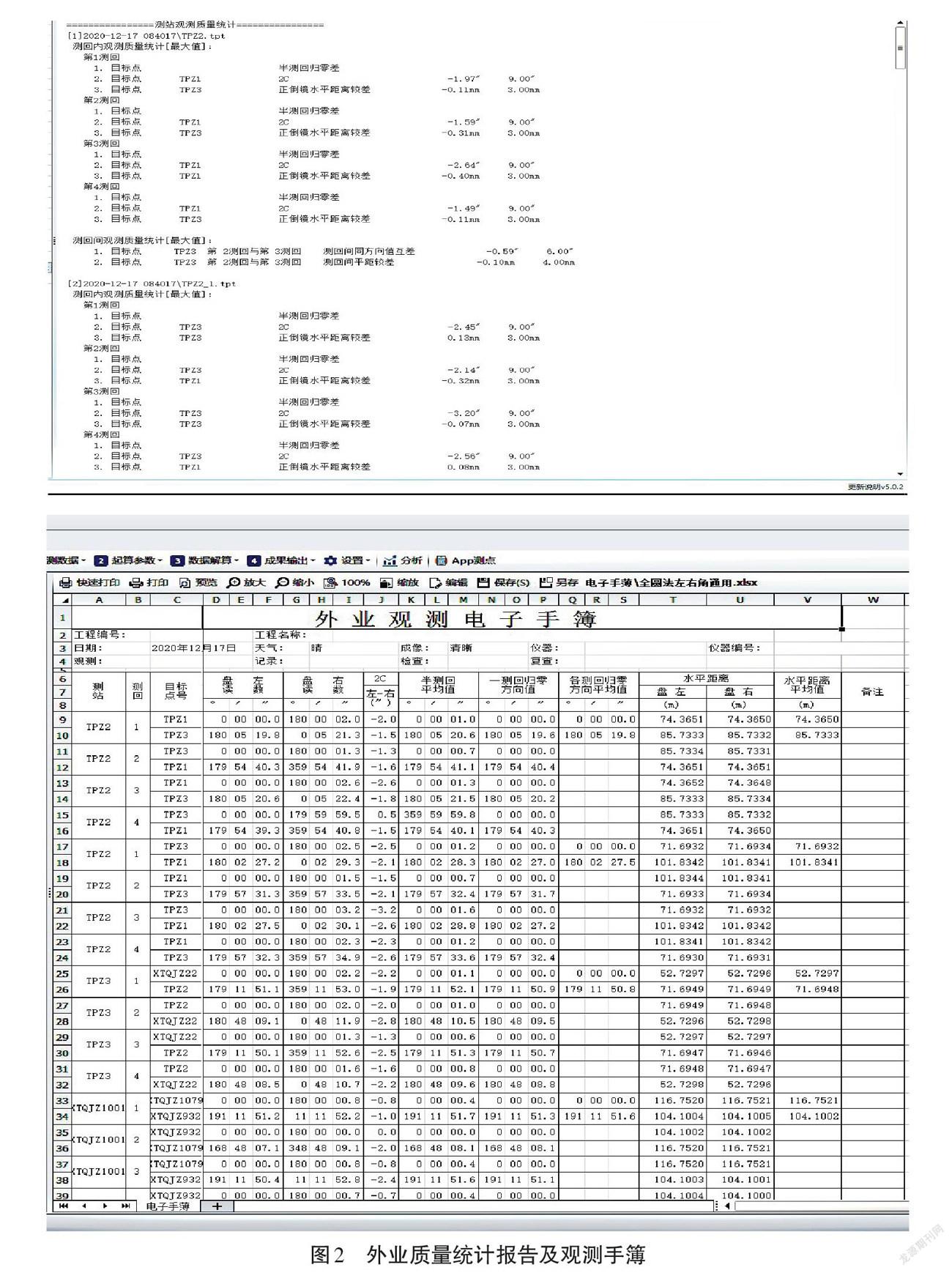
1.2.2 数据检查。下载后采用软件进行数据检查,再次复核外业成果质量。原始数据报表统计水平角2C差、互差和测距往返差、水准线路的视距差、读数差、测段不符值等偏差值,并根据线路等级要求,进行限差判定。外业内置限差后,内业的限差判定基本是一次性通过。然后根据数据留底要求,进行报表输出,见图2。
1.2.3 数据解算。原始数据检查无误后,输入已知点,进行平差计算。同时可导出其他通用平差软件的数据格式,进行成果验证。内业处理人员花费很少的时间进行数据检查及数据解算,能较快地将测量结果反馈至外业人员,指导外业人员对有问题的测段进行返工处理,从而有效避免因返工导致的二次进场所带来的成本浪费。
2 工程实例
2.1 导线测量
佛山市轨道交通三号线第三方测量Ⅱ标段的工程范围包括15个车站、15个区间,标段内控制点位共58个,导线全长47.25 km;其中GNSS点19个,精密导线点39个。按合同及规范的相关规定,全线的精密导线控制网须按照一年一次的频率进行复测。
2.1.1 2019年度复测采用传统模式进行测量。外业数据采集测量班组配置4人,观测员1名(外业经验丰富)、记录员1名(工作细心、熟知规范要求、字迹工整)、棱镜2人。外业测量一站平均在10 min左右,导线控制网测量完毕需25 d左右。
每天作业完成后,测量组回办公室后专业人员花费大量的时间及精力检查计算外业手簿、观测成果统计和对比,一般情况下层层检查、复核需要4 d左右。
2.1.2 2020年采用内外业一体化系统进行。内外业一体化系统是自动测量记录,测量组只需配置3个人,其中2个架设棱镜,1个观测者,无须记录者见图3。外业测量一站平均在3 min左右,导线控制网测量完成需15 d左右。导线控制网内业处理无须花太多时间进行原始手簿的检查,可直接进行计算。
2.1.3 统计分析。测量机器人4测回无超限情况,人工测量出现10次超限情况,增加了作业时间。将两种方法所用人工成本进行统计分析,详见表1。
2.2 底板控制点联系测量
以兴太区间的地下车站基线边联系测量为例,本区间采用两井定向直接导线法,走向示意图见图4。
传统作业模式的联系测量外业数据采集需要1.5 d,原始数据检查复核并完成报告需要2 d左右,总计需3.5 d左右。
内外业一体化作业模式下的外业数据采集需要1 d;内业数据人员下载数据、数据检查、处理及复核完成需要1 h左右。外业人员回到办公室时,成果已经处理完毕,极大地缩短了第三方测量检核时间,从而保障了工程进度。
将人工测量及测量机器人的测角测回差进行统计,利用[方差=Δ×Δn]来评估角度测量的稳定性,详见表2。
从表2得知,测量机器人的测角稳定性明显高于人工测量,能较好地保证测量精度。
3 结语
内外业一体化作业模式经过两年的实践,发展已经成熟并逐渐应用到标段内各类工程测量中。内外业一体化模式采用测量机器人及电子水准仪,实现了记录电子化;运用测量云智能终端实现测量数据的及时传输与数据后处理。总体来说,其具有以下明显优势:
①成果质量稳定,外业效率明顯提高,测量外业返工率明显下降。
②对人员素质要求有所降低,极大地节约了人力成本。
③极大程度地缩短了数据处理和成果报告输出的测量生产周期,测量报告的及时性有了较大提高。
④减小了作业人员的数据检查压力,使其有更多的精力进行现场精细化管理。
参考文献:
[1]秦长利.城市轨道交通工程测量[M].北京:中国建筑工业出版社,2008.
[2]王晓兵,李淑娟,李勇,等.第三方测量在地铁建设中的应用研究[J].测绘通报,2019(S1):245-249.
[3]刘庆年.城市地铁施工测量技术与方法研究[J].南方农机,2017(4):71.
[4]孙士通,张小越.城市轨道交通贯通误差精度分析[J].北京测绘,2017(1S):202-204.
[5]中华人民共和国住房和城乡建设部,中华人民共和国国家质量检验检疫监督局.城市轨道交通工程测量规范:GB/T 50308—2017[S].北京:中国建筑工业出版社,2017.
猜你喜欢
中国医院院长(2023年21期)2023-11-22 10:29:36
当代水产(2023年4期)2023-06-14 02:54:10
今日农业(2021年17期)2021-10-14 07:46:32
汽车工艺师(2021年7期)2021-07-30 08:03:44
航天工业管理(2020年9期)2020-12-28 00:38:12
中国交通信息化(2020年1期)2020-07-27 02:50:04
魅力中国(2019年42期)2019-12-18 02:59:17
中国交通信息化(2019年4期)2019-07-13 05:51:28
经济技术协作信息(2018年20期)2019-01-19 02:56:30
石油化工建设(2018年2期)2018-07-11 01:25:00
