基于模糊RBF神经网络光电检测系统应用的研究
2021-03-07 09:13:04李春峰
电子技术与软件工程 2021年19期
李春峰
(长春大学电子信息工程学院 吉林省长春市 130022)
近年来,随着电力电子技术、自动控制技术、单片机技术、激光技术、半导体技术及光电转换技术的发展,各种新兴检测技术层出不穷,光电检测技术就是伴随着半导体技术和激光技术发展而出现的一门新兴检测技术,主要包括光的检测电路、信号放大电路、滤波电路、A/D转换电路及光电转换电路等。其优点是光电检测系统在检测位移、温度、压力、湿度、液位、转速、力矩、震动等非电量模拟信号时能够实现与被检对象零接触,且检测精度高、速度快,成为了现代检测技术的重要组成部分。但由于光电检测系统中检测到的信号是随着时间变化而变化的非线性、时变性信号,因此,其精确的数学模型很难建立。随着人工智能技术发展,国内外学者尝试着把不依赖精确数学模型建立人工智能技术与现代检测技术相结合,形成智能光电检测技术,并取得了一定的研究成果,被广泛的应用到实际生活中。本文就是针对当前研究的智能检测热点问题,采用基于模糊RBF神经网络组成智能光电检测系统,实现对位移、温度等非电量模拟信号的进行检测,使光电检测系统智能化进一步提高,为相关研究者以后研究已提供技术支撑。
1 国内外发展现状
智能光电检测技术是由智能技术、半导体技术和激光技术相融合而成。具有检测多种信号信息的能力,同时兼备智能判断、智能推理、自学习、自动修正测量值、提高测量精度功能,在一定程度上提高了光电检测的精度。但发展历程也经历了近半个世纪时间。1965年,美国加利福尼亚大学扎德(L.A.Zadeh)在一篇学术论文中开创性的提出了模糊集合的概念,从此人们就开始了模糊技术的研究;1987年,一个模糊逻辑芯片在倒立摆实验中的应用,对于这个经典的控制问题的解决,给观察者们留下了深刻的印象。随着对智能理论技术与应用技术研究的深入,美国、英国和日本等国家最先将智能控制技术应用到机器人控制领域、生产过程控制领域及日常生活领域,这些模糊技术领域产品进入市场后非常受使用者欢迎,并且这些产品在使用效果方面更加良好,更富有“人性味”,得了明显的效益,促进了智能技术在光电检测技术方面的应用,并被越来越多研究者重视。在国内对智能技术的研究起步较晚,我国的智能技术的实现方法主要以软件方法为主,在硬件开发方面还和国外有着一定的差距,智能控制技术的产业化推广还需要进一步加强[1]。
2 模糊RBF神经网络光电检测系统总体设计方案
模糊RBF神经网络光电检测系统总体设计方案如图1所示。光电检测系统涵盖了电力电子技术、自动控制技术、单片机技术、激光技术、半导体技术、光电转换技术及人工智能等新技术,主要由光学系统、光电转换、滤波电路、前置放大电路、运算与处理、A/D转换、微处理器、模糊RBF神经网络、外围接口电路及信息输出接口等组成。它以微处理器与模糊RBF神经网络为核心,通过检测被检测对象的信号,经光电转换器转换成能够识别的电信号,但由于检测到信号中含有干扰信号,需经滤波电路滤除干扰信号,经滤除后,可得到与检测信号相对应的弱电信号,由于信号较弱,需经前置放大电路将弱电信号放大成容易被检测到的信号,最终经A/D转换器将模拟信号转换成数字信号,送入微处理器和模糊RBF神经网络进行数据处理,最终得到精确的检测信号,完成整个光电检测系统一个循环。

图1:模糊RBF神经网络光电检测系统总体设计方案
3 模糊RBF神经网络PID控制器设计方案
模糊RBF神经网络PID控制器设计方案如图2所示。控制器主要由模糊化模块、RBF神经网络模块以及经典PID控制器3部分组成。控制器通过模糊化模块首先将采集到的光电信号进行量化处理,并经RBF神经网络以加权形式对经典PID参数进行整定,最后由调整的参数控制系统。图2中r为给定电压信号,u(k)为PID控制器的输出信号,y为电机转速输出信号。其工作原理是将输出端的信号y反馈到输入端,与输入端给定电压信号进行比较后形成偏差电压,一方面输入给经典PID控制器,另一方面将偏差电压输送给模糊化模块进行模糊量化处理,再经RBF神经网络辨识,对原来设定的参数值进行修正,达到对被控对象进行调节的作用。
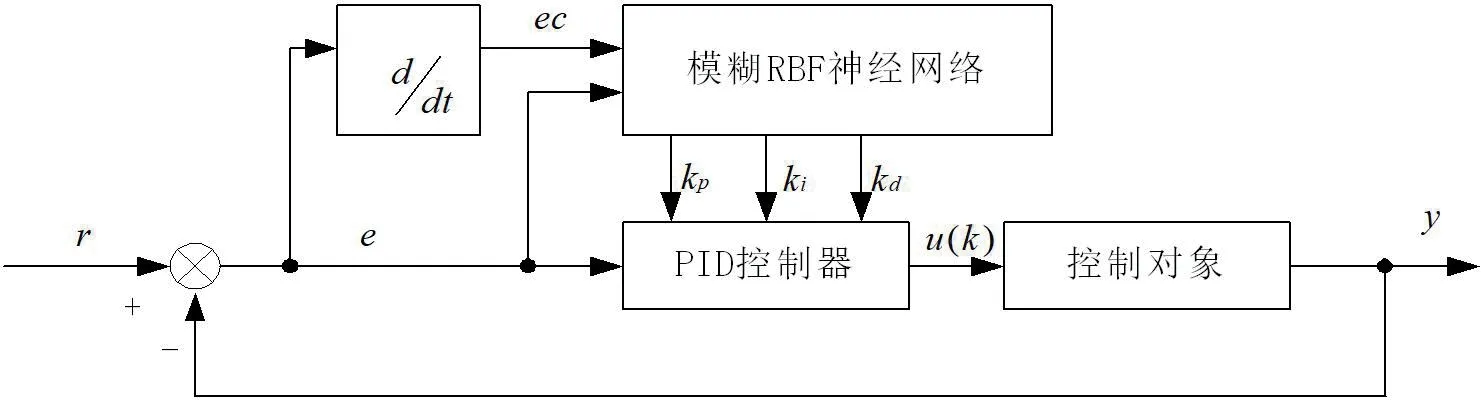
图2:模糊RBF神经网络设计方案
4 光电检测系统噪声双路消噪法设计方案
在光电检测系统中,光电检测电路对光电信号进行检测的过程中,除了按要求检测到所需的检测信号之外,被检测的信号中还存在一些干扰的噪声信号,影响检测精确。而被检测信号中的噪声信号是波形、相位及瞬时振幅均具有随时间非线性无规律变化的特征,因此,噪声在光电检测系统中很难对其进行精准测量。但是被检测信号的变化却具有一定的科学规律,故根据两者之间的差异性,设计合理的噪声去除装置,可以有效的消除噪声的影响。图3就是根据噪声信号与被检信号差异性设计的消除噪声信号影响原理图,设计方法称为双路消噪法。由图3可以得出,被检测信号经过两个通道的处理后,在加法器中由于随机噪声信号极性相反而相互抵消,这样通过阀值电路中的少数的强噪声才能够产生本底计数,根据长时间内的本底计数值是恒定的原理,在进行数据处理时可以先将其测量出来,再从总计数中减去,进而得到有用信号实际计数[2]。
5 模糊RBF神经网络光电检测系统转子转速检测设计方案
模糊RBF神经网络光电检测系统转子转速检测设计方案如图4所示。图中在旋转的无刷直流电机转子转轴上粘贴一个高反射率的矩形铝箔,当转子转轴每旋转一周时,光电检测系统就检测得到一组与转速相对应的脉冲信号,经信号捕获单元捕获后,将捕获后的脉冲信号输送给光电检测系统,经信号放大器放大后并经去噪处理,最终输出与检测信号相对应的检测信号。
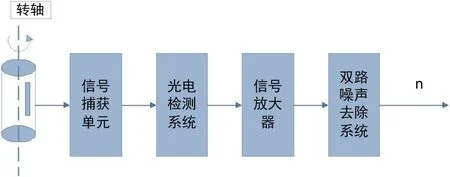
图4:模糊RBF神经网络光电检测系统转子转速检测设计方案
6 模糊RBF神经网络光电检测系统验证设计方案
模糊RBF神经网络光电检测系统验证设计方案如图5所示。系统采用外环为速度环内环为电流环双的闭环系统对无刷直流电机转速进行控制。双闭环系统即实现了对电机转速的检测也实现了对电机电流的检测,其速度控制器采用模糊RBF神经网络PID控制器,其作用是将给定的电压信号与转速环节反馈的电压信号进行比较,将比较后的电压信号经模糊控制器模糊化后,送入RBF神经网络,利用RBF神经网络自组织、自学习能力在线调整神经网络权值,进而得到能随着神经网络权值调整而变化的参数,最后由调整的参数控制系统,使系统具备良好的动静态性能。整个控制系统的关键就是转速检测的精准性,本文采用基于模糊RBF神经网络构建的光电检测系统实现对转子转速的精准检测,实现转速的精准控制。
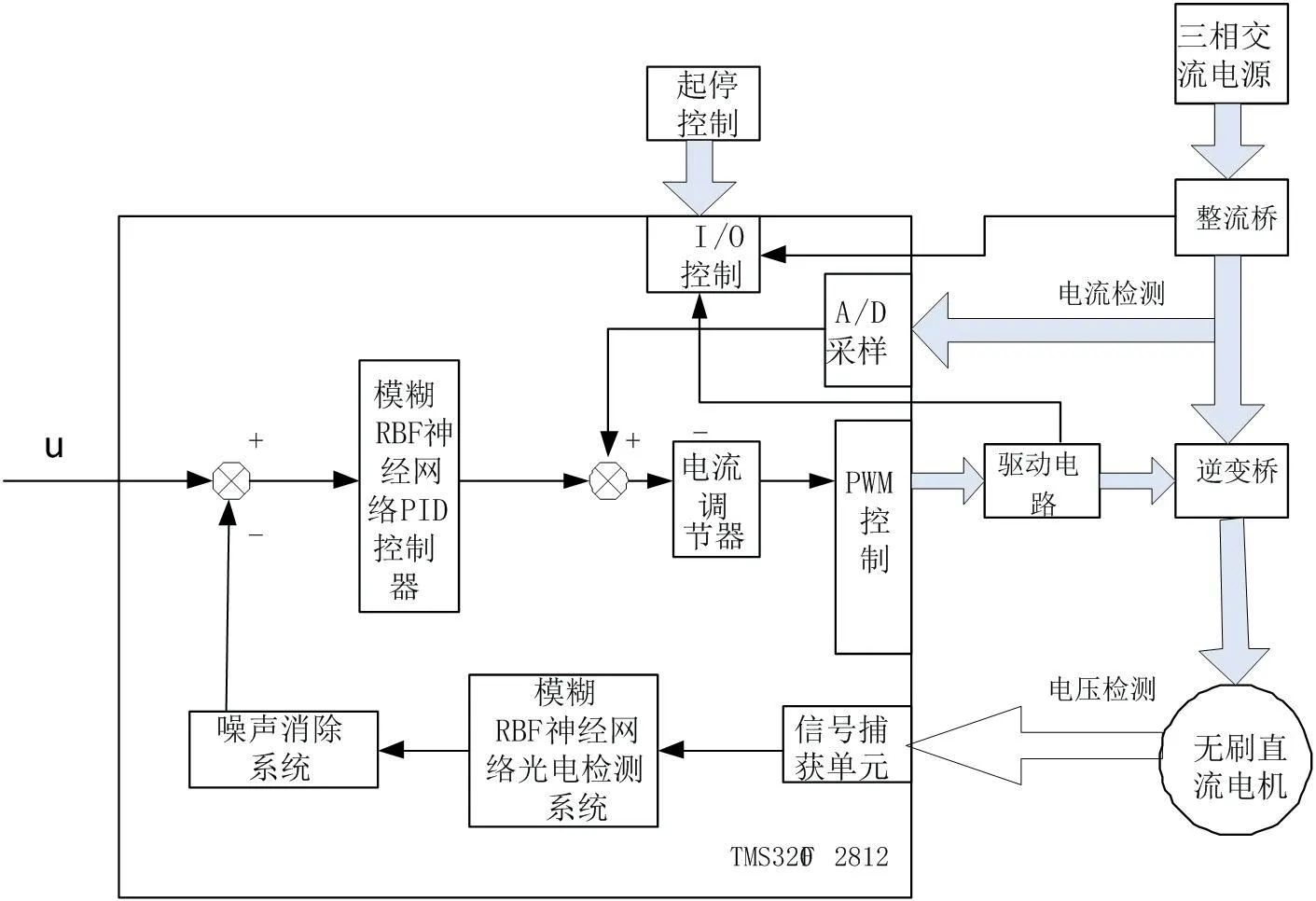
图5:模糊RBF神经网络光电检测系统设计方案
7 结束语
本文通过对基于模糊RBF神经网络光电检测系统应用的设计,介绍了通过多对模糊RBF神经网络光电检测系统总体方案、模糊RBF神经网络PID控制器方案、光电检测系统噪声双路消噪法方案、模糊RBF神经网络光电检测系统转子转速检测方案、模糊RBF神经网络光电检测系统验证方案等的设计,为以后从事相关研究人员提供理论帮助。
猜你喜欢
建材发展导向(2022年10期)2022-07-28 03:04:06
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
电子制作(2019年19期)2019-11-23 08:42:00
铁道通信信号(2019年8期)2019-10-10 05:05:56
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
电子制作(2016年21期)2016-05-17 03:53:23
重型机械(2016年1期)2016-03-01 03:42:04
汽车实用技术(2015年8期)2015-12-26 09:01:00
大连工业大学学报(2015年4期)2015-12-11 04:06:52
海军航空大学学报(2015年4期)2015-02-27 13:45:47