
基于WIFI的机器人控制系统设计
2021-03-07 00:07汪香念韩军良唐传胜伏开心
装备维修技术 2021年46期
汪香念 韩军良 唐传胜 伏开心

摘 要:本文采用32位ARM微处理器作为主控单元,采用ESP8266 WIFI模块实现手机终端与机器人之间的无线通信,设计了系统硬件电路,开发了系统程序,手机终端通过无线网络与机器人实现远程控制。实验结果表明,本文的设计方案实现了手机终端通过WIFI无线通信远程控制机器人的功能。
关键词:无线网络;远程通信;智能控制;机器人;微处理器
1引言
随着无线网络技术越来越成熟,人们开始考虑将其与机器人系统相结合,从而使机器人具有可远程控制的功能。无线网络技术中因具有有效距离长、传输速度快等特点的WIFI(无线局域网)技术得到了广泛的应用[1],本文将其与机器人系统相融合,并使用ARM作为控制系统的核心,设计了一款基于无线网络的机器人控制系统。
2系统硬件电路设计
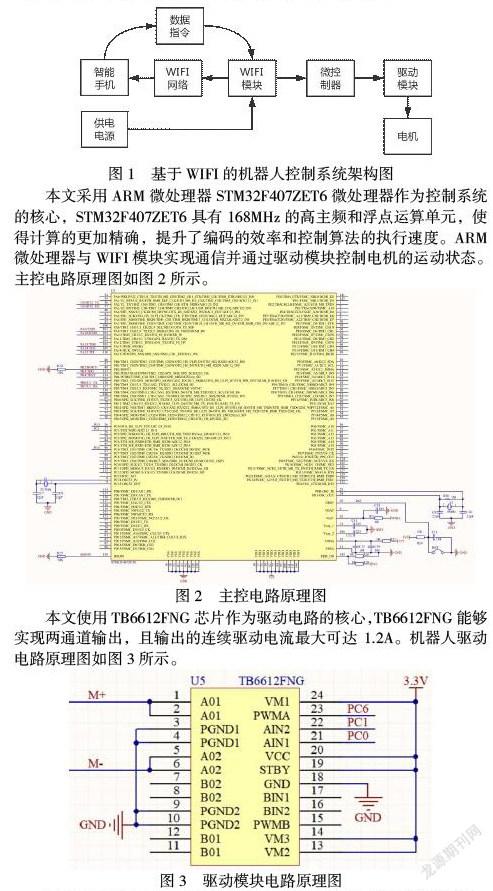
本文设计的基于WIFI的机器人控制系统架构如图1所示,系统采用32位的ARM微处理器作为主控单元,辅以ESP8266WIFI模块、电机驱动模块,从而实现手机远程控制机器人运动的功能。
本文采用ARM微处理器STM32F407ZET6微处理器作为控制系统的核心,STM32F407ZET6具有168MHz的高主频和浮点运算单元,使得计算的更加精确,提升了编码的效率和控制算法的执行速度。ARM微处理器与WIFI模块实现通信并通过驱动模块控制电机的运动状态。主控电路原理图如图2所示。
本文使用TB6612FNG芯片作为驱动电路的核心,TB6612FNG能够实现两通道输出,且输出的连续驱动电流最大可达1.2A。机器人驱动电路原理图如图3所示。
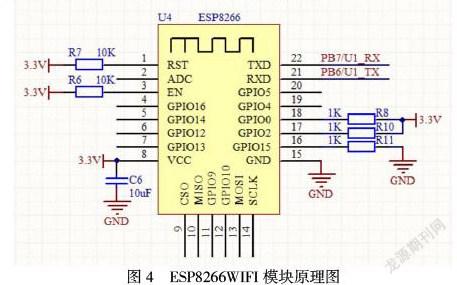
采用ESP8266 WIFI模块实现手机终端与机器人之间的无线通信,并使用AT指令对其进行功能配置。ESP8266具有STA、AP及STA+AP三种工作模式[2],本文采用AP模式,电路原理图如图4所示。ESP8266 WIFI模块的RXD接STM32F407ZET6的USART1_TX,ESP8266 WIFI模块的TXD接STM32F407ZET6的USART1_RX。
3系统软件程序设计
本系统需要建立微处理器和WIFI模块之间的通信,因此需要对微处理器的串口进行初始化配置;还需要建立手机和WIFI模块之间的通信,因此需要设计程序对WIFI模块进行功能配置(配置工作模式、波特率、WIFI名称和密码等);此外为保证手机发送的数据通过WIFI模块传输给微处理器后,微处理器能通过相应的程序段的运行控制机器人运动,还需对驱动模块进行程序设计。
在主程序中设置两个变量:WIFIdata1和WIFIdata2,通过程序设计使得这两个变量为某个值时,机器人做出相应的动作(前进、后退、加速、减速)。系统程序设计流程如图3所示。
4结论
本文采用ARM微处理器STM32F407ZET6作为控制核心,结合WIFI模块,建立手机、WIFI模块和微处理器三者之间的通信,再经由驱动模块实现了对机器人的远程控制。将机器人系统与无线网络技术相融合具有操作方便、可远程控制的优点,使得机器人在某些领域的应用也变得更加智能。
参考文献
[1] 胡长鹏,马海霞,林思敏. 一种基于WiFi无线通讯的智能插座设计与实现[J]. 机电工程技术,2021, 50(08): 70-73.
[2] 李双斌,吕志华,朱鹏洲. 基于ESP8266的太阳能自动跟踪和智能控制装置[J].南方农机,2021,52(12):37-39.
项目来源:1、河南省高等学校重点科研项目“空调压缩机振动噪声的主动补偿控制策略研究”(21A413005); 2、河南省重点研发与推广专项(科技攻关)“新型高灵敏度智能压电微生物传感器构建的关键技术研究”。
作者簡介:汪香念,女,河南商丘人,学生。
猜你喜欢
电子技术与软件工程(2019年8期)2019-07-16
科教导刊·电子版(2017年28期)2017-11-22
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14
中国新通信(2016年15期)2016-09-08
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国计算机报(2009年21期)2009-04-22
