
基于半监督多视角聚类的特种设备安全预警方法
2021-03-07 00:07徐黄镇杜文辉沈峰敏张福康
装备维修技术 2021年46期
徐黄镇 杜文辉 沈峰敏 张福康
摘 要:随着我国经济社会的高速发展,特征设备在工业制造、交通建设、能源动力、城市管理、文化旅游等多个行业领域对中得到了广泛使用,已经成为我国经济社会发展必不可少的重要组成部分。然而,特种设备在使用过程中存在许多潜在的安全风险,其危险系数较高。为了有效预防特种设备在使用过程中出现安全事故,本文提出了一种基于半监督多视角聚类的特种设备安全预警方法(SM-MVC)。该方法一方面通过特种设备多源数据融合提高安全预警的准确度,另一方面通过结合低秩表示方法对多源数据中的噪声进行处理,增强了对异常设备的判别能力。最后,通过在多个公开数据集和真实数据集上的仿真实验验证了本文方法的有效性。
关键词:特种设备安全预警;半监督聚类;多视图聚类;非负矩阵分解;低秩表示
1引言
随着我国经济社会的高速发展,特征设备在工业制造、交通建设、能源动力、城市管理、文化旅游等多个行业领域对中得到了广泛使用,直接影响百姓生产和生活的方方面面,已经成为我国经济社会发展必不可少的重要组成部分。然而在我国目前的特种设备管理模式中,特种设备的安全运行仍然依赖于操作和监管人员的专业素质水平。因此,需要利用现代人工智能技术推动特种设备安全监管模式创新,降低由于人工因素诱发的特征设备安全问题,提高特种设备自动化、智能化安全监管能力。
为了解决上述问题,本文提出了一种基于半监督多视角聚类的特种设备安全预警方法(SM-MVC),该算法的目的是利用多源数据,从特种设备的历史数据中找出影响设备故障因素之间的关系,并根据这些关系对特种设备的进行分级预警。该方法可以利用已有的标签信息在多视角空间对数据进行聚类。
2相关工作
国内的特种设备安全监管大数据平台主要通过汇聚不同数据源的数据资源进行安全监管,其核心在于通过对特种设备基础数据、质监监管数据、检验业务数据、业主数据、维保数据等数据资源的收集.采用决策树方法对多源数据进行利用,时间复杂度较小,但如果数据存在噪声,生成分支过多算法导致过分拟合。
虽然结合人工智能技术和特种设备安全监管任务的研究正在快速发展,但是相关研究工作并没有考虑融合多平台的多源数据,其理论基础仍然比较薄弱。提出在电梯的全生命周期中需要收集其结构化、非结构化的多源数据,才能为进一步的数据处理和分析奠定基础。提出了一种基于特种设备多源大数据质量评价方法,为后续大数据分析及一体化集成服务提供质量保障。本文首先基于多视图的非负矩阵分解,实现特种设备多源数据的融合,其次通过低秩表示方法,对复杂的多源数据进行处理,消除数据中的噪声影响,实现特种设备安全状态的自适应分类,从而提高对特种设备安全预警的准确度。
3基于半监督多视角聚类的特种设备安全预警方法
为了解决传统特种设备安全预警方法无法将已有设备特征信息利用的情况。本文提出的基于低秩半监督多视角聚类的特种设备安全预警方法。
3.1原理和目标
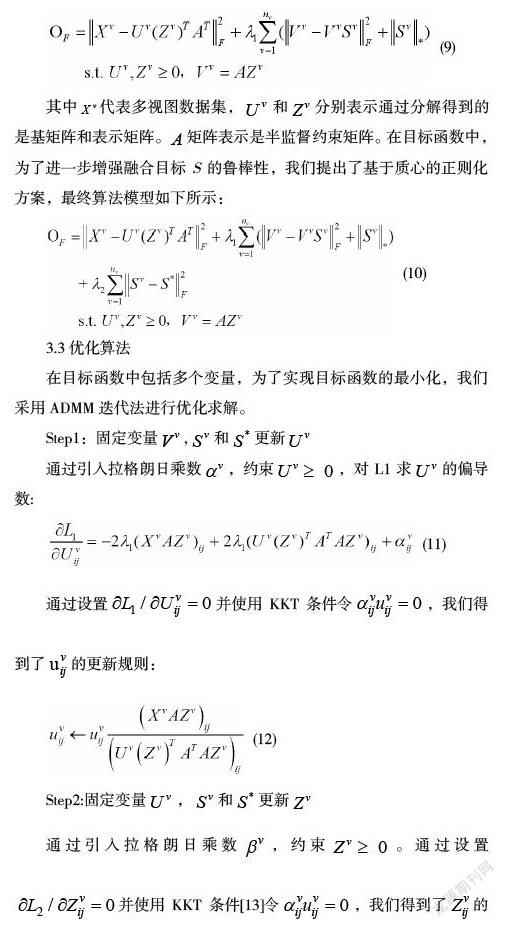
基于半监督非负矩阵分解,我们一方面引入图表示矩阵S捕捉每个数據源中的结构信息,另一方面为了降低多源数据中的噪声影响,引入低秩表示对融合目标进行处理,通过最小化如下目标函数实现多源数据融合:
(9)
其中 代表多视图数据集, 和 分别表示通过分解得到的是基矩阵和表示矩阵。 矩阵表示是半监督约束矩阵。在目标函数中,为了进一步增强融合目标S的鲁棒性,我们提出了基于质心的正则化方案,最终算法模型如下所示:
(10)
3.3优化算法
在目标函数中包括多个变量,为了实现目标函数的最小化,我们采用ADMM迭代法进行优化求解。
Step1:固定变量 , 和 更新
通过引入拉格朗日乘数 ,约束 ,对L1求 的偏导数:
(11)
通过设置 并使用KKT条件令 ,我们得到了 的更新规则:
(12)
Step2:固定变量 , 和 更新
通过引入拉格朗日乘数 ,约束 。通过设置 并使用KKT条件[13]令 ,我们得到了 的更新规则:
(13)
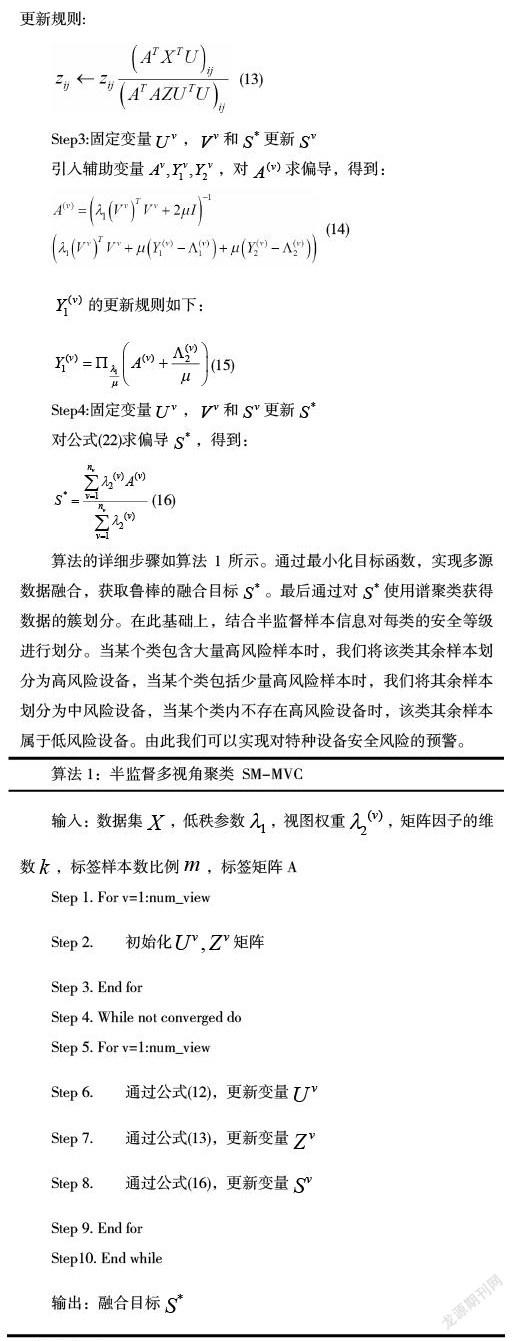
Step3:固定变量 , 和 更新
引入辅助变量 ,对 求偏导,得到:
(14)
的更新规则如下:
(15)
Step4:固定变量 , 和 更新
对公式(22)求偏导 ,得到:
(16)
算法的详细步骤如算法1所示。通过最小化目标函数,实现多源数据融合,获取鲁棒的融合目标 。最后通过对 使用谱聚类获得数据的簇划分。在此基础上,结合半监督样本信息对每类的安全等级进行划分。当某个类包含大量高风险样本时,我们将该类其余样本划分为高风险设备,当某个类包括少量高风险样本时,我们将其余样本划分为中风险设备,当某个类内不存在高风险设备时,该类其余样本属于低风险设备。由此我们可以实现对特种设备安全风险的预警。
算法1:半监督多视角聚类 SM-MVC
输入:数据集 ,低秩参数 ,视图权重 ,矩阵因子的维数 ,标签样本数比例 ,标签矩阵A
Step 1. For v=1:num_view
Step 2. 初始化 矩阵
Step 3. End for
Step 4. While not converged do
Step 5. For v=1:num_view
Step 6. 通过公式(12),更新变量
Step 7. 通过公式(13),更新变量
Step 8. 通过公式(16),更新变量
Step 9. End for
Step10. End while
输出:融合目标
4仿真实验
本文的比较方法包括多种多视图聚类方法:多视图共生图聚类(MCGC),多视角聚类图学习(MVGL),基于低秩稀疏分解的鲁棒多视图谱聚类(RMSC),非负矩阵分解(NMF),基于图正则化的非负矩阵分解(GNMF),受限非负矩阵分解(CNMF)。
4.1实验数据集
本文采用了uci-digit1、3-sources2、MSRC_v13、BBCSport4、BBC4五个仿真数据集和一个真实电梯数据集Elevator。uci-digit数据集:包含手写数字0到9的2000个样本,共有10个类。3-Sources数据集:包含来自BBC、Reuter、guardian新闻文章的数据集,使用其中169篇。MSRC-v1数据集:包含240张共8个类别的图像,本实验选择7个物体共计210张。BBCSport数据集:包含来自2个不同领域的544条体育新闻。BBC数据集:包含来自BBC新闻的685份文档,可以分为5类。Elevator数据集:包含来自湖州市特种设备检测研究院提供的2020年曳引驱动载货电梯的运行数据。该数据集共包含358份样本,每个电梯样本包括生产数据、环境数据和检修数据3个数据源。
4.2实验结果
算法中主要包含2个主要参数λ和r,分别用于控制低秩的程度和于控制半监督标签的百分比。在实验中,各视图均设置相同权重系数。实验结果如图1所示,我们首先从区间[0.001,0.01, 0.1,1.0,10]选择最佳参数λ,然后借助最佳参数从对应区间选择最佳参数 ,其余参数保持一致。
为了避免算法中随机初始化引起的误差,本次实
验每种算法在数据集上均运行十次,采用“平均值(标准差)”的格式进行展示。相比以RMSC为代表的多视角聚类算法,我们的方法在聚类精度上均取得最优,这证明了我们的方法具有更好的性能,聚类结果更加鲁棒。
为了验证我们的半监督多视图聚类方法SM-MVC对特种设备安全预警的效果,我们从湖州市2020年曳引驱动载货电梯的运行数据中提取出包含三个数据源的电梯数据集。该数据集共包含358份样本,每个电梯样本包括生产数据、环境数据和检修数据3个数据源。实验过程中半监督标签比例为 [0.1,0.2,0.3,0.4]。
5总结
为了将已有的特种设备样本利用起来以提高安全预警能力。本文提出了SM-MVC算法,将已知设备信息作为标签信息加入。在标签信息的帮助下,我们的模型首先会将具有相同标签的样本合并到同一新的表示中。同时,利用低秩表示,有效的避免了數据收集过程中噪声造成的干扰。通过在仿真数据集和真实数据集上的实验结果,证明了算法的有效性。
参考文献
[1]苏超,容烁.特种设备安全监管大数据平台研究[J].物联网技术,2020,10(07):59-62.
[2]王新浩,罗云,李桐,黄西菲.基于大数据的特种设备宏观安全风险预警方法研究[J].中国安全生产科学技术,2018,14(04):160-166.
[3]徐斌, 李琳, and 钟珞, “面向大数据的智慧电梯分析预警平台,” 武汉理工大学学报(交通科学与工程版), no. 41, pp. 359–362, 2017.
[4]刘佳璐 and 贾中辉, “基于大数据的电梯维保智能管控云平台的设计与实现,” 中国电梯, vol. 030, no. 016, pp. 39-42,64, 2019.
姓名:徐黄镇,出生年月:1987年01月,性别:男,民族:汉,籍贯:浙江省湖州市,学历:本科,职称:工程师,从事工作:特种设备检验。
