基于雷达对抗原理的携带载荷无人机理论计算
2021-03-05 07:55:28焦玉超
指挥控制与仿真 2021年1期
焦玉超
(中国人民解放军91404部队,河北 秦皇岛 066000)
近年来,随着小型化和智能化不断发展,小型无人机的设计和应用技术日趋成熟。在战术组织运用的形式上,网络化集群作战的新模式被更多地采用,由此产生了小型无人机集群[1]。无人机集群作战的主要优势是数量多,成本低,可以挂载不同类型的任务载荷参与作战。虽然无人机集群有很多作战样式,但是,目前主要的作战方式是无人机集群平台挂载电子干扰载荷对水面舰艇实施电子干扰,削弱破坏水面舰艇预警探测系统,诱导水面舰艇使用防空武器实施拦截抗击,消耗其防空资源[2]。要想让无人机挂载的电子干扰载荷可以有效地发挥作用,需要规定无人机距离水面舰艇的距离和高度。因此,应用雷达对抗原理进行理论计算能为无人机所携带的电子干扰载荷发挥有效作用提供保障。
无人机集群在战术动作上,有蜂拥和分散队形,队形的变化在水面舰艇上的显示与水面舰艇雷达分辨范围密切相关。因此,依据雷达对抗原理对无人机集群作战重要参数的计算尤其重要。
1 理论公式
无人机集群作战样式为对水面舰艇的雷达进行电子干扰,则无人机平台上需挂载干扰机,干扰机能够有效地破坏敌方水面舰艇雷达对我方目标监测、跟踪[3]。要想让干扰机有效发挥干扰能力,必须对干扰机的干扰原理进行分析。根据《雷达对抗原理》中干扰机的有效干扰空间理论,雷达天线以其主瓣指向目标,干扰发射天线以其主瓣指向雷达[4]。干扰机、目标与雷达的相对波束张角为θ。
雷达收到的目标回波信号功率Prs和干扰信号功率Prj分别为:

(1)
(2)
其中,Pt为雷达发射功率,Gt为雷达天线在干扰方向上的增益,σ为目标的雷达截面积,A为雷达天线的有效面积,λ为波长,Rt为雷达与目标之间的距离,PJ为干扰发射功率,GJ为干扰发射天线增益,Gt(θ)为雷达天线在干扰方向上的增益,νJ为干扰信号与雷达信号的极化失配损失系数,通常干扰信号为圆极化,雷达天线为线极化,γ=0.5;RJ为雷达与干扰机之间的距离。由此得到雷达接收机输入端的干扰和目标回波信号功率比J/S为
(3)
要想实现干扰机的有效干扰,基本条件就是保证J/S≥KJ。KJ为在雷达接收机输入端有效干扰的压制系数,简称为压制系数。它是与干扰信号、调制参数和雷达信号参数相关的复杂函数。将此条件代入式(3)可得
(4)
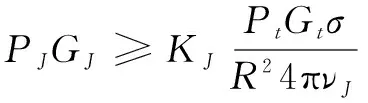
将式(4)进行整理,可得干扰机的有效干扰空间为

(5)
不难看出,对于特定的雷达、干扰机和目标参数,式(5)的右边是一个常数,其数值越小,则有效干扰空间越大;雷达天线的旁瓣电平越低,则在旁瓣方向的有效干扰空间越小[7]。

(6)
Rt为雷达与目标之间的距离,RJ为雷达与干扰机之间的距离,因此研究为干扰机安装在无人机目标上,此时Rt与RJ相等,都用R表示,则式(6)也可以改写为对有效辐射功率的要求:
(7)
为找到无人机平台挂载的干扰机所能产生干扰效果的最小功率,对式(7)作临界处理,取等号得

(8)
对确定的水面舰艇雷达来说,Pt、Gt、γJ是确定值,将干扰机功率PJGJ视为函数因变量,其值的大小主要与无人机平台的雷达截面积σ和水面舰艇雷达与无人机平台的距离R有关[5]。
2 结果分析
取Pt=150 kW、Gt=104、γJ=0.5,无人机的雷达截面积σ分别取0.1 m2、0.3 m2、0.5 m2和1 m2。雷达接收机输入端有效干扰的压制系数KJ分别为10、50、70和100。取水面舰艇雷达与无人机平台所挂干扰机之间的距离R在5~100 km之间,基于理论公式得到不同σ和KJ取值时干扰机最小功率与干扰距离之间的关系,如图1所示。由此确定在不同距离R时干扰机所能产生干扰效果的最小功率[6]。
取水面舰艇雷达与无人机平台所挂干扰机之间的距离R分别为10 km、20 km、30 km、40 km和50 km,根据图1得PJGJ的精确值分别如表1、表2、表3和表4所示。

表1 当σ=0.1时PJGJ的值

表2 当σ=0.3时PJGJ的值

表3 当σ=0.5时PJGJ的值
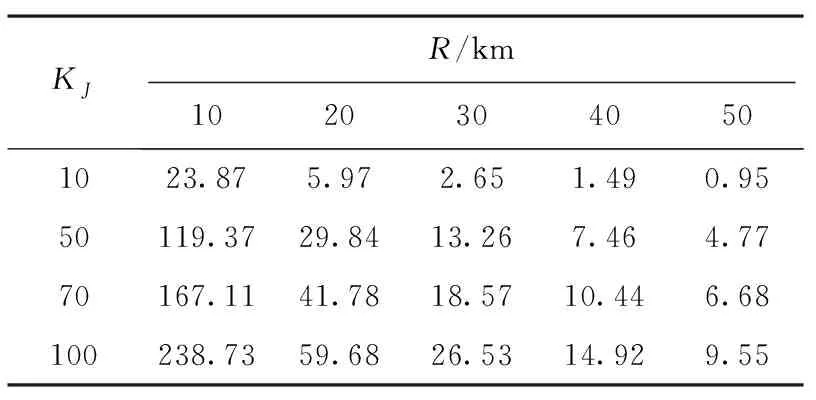
表4 当σ=1.0时PJGJ的值
图1 不同σ和KJ时干扰机最小功率与干扰距离的关系
根据图表分析可知:当无人机的雷达截面积σ和水面舰艇雷达与无人机平台所挂干扰机之间的距离R确定时,所需干扰机的最小功率PJGJ随着雷达接收机输入端有效干扰的压制系数KJ的增大而增大;当目标的雷达截面积σ和压制系数KJ确定时,所需干扰机的最小功率PJGJ随着雷达与目标之间的距离R的增大而减小;当雷达与目标之间的距离R和压制系数KJ确定时,所需干扰机的最小功率PJGJ随着目标的雷达截面积σ的增大而增大。
水面舰艇雷达的分辨率受其波束宽度影响。取其方位角为1.0°、1.5°、1.7°和2°,分别得到在不同角度下雷达分辨范围与无人机所挂干扰机距离水面舰艇雷达径向距离的关系[8],如图2所示。

图2 不同角度时雷达分辨范围与距离的关系
取水面舰艇雷达与无人机所挂干扰机之间的距离R分别为10 km、20 km、30 km、40 km和50 km,根据图2计算得到不同角度时水面舰艇雷达分辨范围的精确值,如表5所示。
由图2和表5表可知:当角度确定时,雷达分辨范围随着干扰机距离目标物径向距离的增大而增大;当干扰机距离目标物径向距离确定时,雷达分辨范围也随着角度增大而增大。
表5 雷达的分辨范围
为确定无人机的飞行高度范围,根据干扰机的安装角度和天线的俯仰角度范围确定干扰机具有干扰效果时的最大高度和干扰机距离目标物的径向距离的函数关系式。取干扰机的安装角度为5°,天线俯仰角度范围为±30°,根据函数公式绘得图3。

图3 最大高度和距离的函数关系图
由图3可知,干扰机具有干扰效果时的最大高度随着干扰机距离目标物的径向距离的增大而增大。取干扰机距离目标物的径向距离分别为10 km、20 km、30 km、40 km和50 km,得到干扰机具有干扰效果时的最大高度的精确值如表6所示。

表6 最大高度与距离的关系表
取无人机的雷达截面积σ为0.1 m2,雷达接收机输入端有效干扰的压制系数KJ为100,雷达与目标之间的距离R为30 km,可得干扰机所能产生干扰效果的最小功率PJGJ为2.65 W。
当干扰机距目标物距离为30 km,雷达方向角为2°,可得雷达的分辨范围为1.05 km。
当干扰机距离目标物的径向距离分别为30 km时,携带干扰机的无人机要想产生干扰效果所能飞行的最大高度为21 km。
图1和图2中得到不同角度和不同距离下的雷达分辨范围,作用就是可以根据无人机集群的作战方式选择合适的无人机集群编队方式,尤其是决定编队内单架无人机彼此之间的距离,以实现无人机集群的蜂拥和分散变化,迷惑敌方水面舰艇雷达上的显示。
3 结束语
无人机集群能够在提高作战能力的同时降低作战成本,极有可能为未来装备发展模式带来深刻变革。无人机集群将不断补充并支撑传统飞机在近距离空中支援、侦察、防空、通信以及补给任务方面的能力。无人机集群要想发挥这些能力,必须进行理论计算为无人机提供航路规划的依据。通过本文的分析:明确了无人机的不同雷达截面积和不同的压制系数对无人机携带电子干扰载荷对水面舰艇雷达产生干扰效果时距离与电子干扰载荷功率的函数关系;为无人机与水面舰艇的径向距离和电子干扰载荷有干扰效果时的无人机飞行最大高度关系提供了理论计算方法;得出了波速宽度对雷达分辨范围影响的趋势,为无人机编队选择合适的间隔距离提供支撑。
猜你喜欢
军事文摘(2023年1期)2023-02-03 05:05:26
航天电子对抗(2019年4期)2019-12-04 09:01:49
风能(2019年10期)2019-02-18 11:12:26
科技创新与应用(2018年29期)2018-12-13 01:56:50
中国军转民(2018年1期)2018-06-08 05:53:23
北京航空航天大学学报(2017年9期)2017-12-18 07:12:24
兵器知识(2017年10期)2017-10-19 19:34:33
山东工业技术(2017年19期)2017-09-27 11:32:21
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
军事运筹与系统工程(2016年4期)2016-07-10 09:22:26