水文水深数据修正的普里兹湾数字水深模型
2021-03-04 01:47陶怡轩刘成彦王召民
大气科学学报 2021年1期
陶怡轩,刘成彦②*,王召民②**
① 河海大学 海洋学院/国际极地环境研究实验室,江苏 南京 210098;② 南方海洋科学与工程广东省实验室(珠海),广东 珠海 519000
*联系人,E-mail:chengyan.liu@hhu.edu.cn
**联系人,E-mail:zhaomin.wang@hhu.edu.cn
了解海底地形是开展海洋科学研究的基础,对于物理海洋学、海洋生物学、化学和地质学等领域都有重要意义(Sandwell and Smith,2001;樊妙等,2017)。海底地形能够影响海洋的环流和混合,进而调节地球气候(Munk and Wunsch,1998;Kunze and Llewellyn,2004),影响海洋生物资源的分布(Koslow,1997),记录地质历史和海洋盆地的活动(Müller et al.,1997),揭示可能储存石油和天然气等资源的区域(Fairhead et al.,2001),并且有利于研究地震和海啸等活动(Mofjeld et al.,2004;Becker et al.,2009)。
然而,对海底地形的认识还存在很多不足。尽管自20世纪50年代海洋测深技术广泛应用以来,人类已经获取了大面积的海底地形数据,但依然存在很大部分区域处于未勘测状态(Mayer et al.,2018)。对于自然环境严酷的极地区域来说,常年的海冰覆盖使得这种情况更加严重。特别是南极陆架区域的观测更为稀少,水深地形数据存在大量任意插补的问题,对建立南极陆架区域数字水深模型提出了挑战(Arndt et al.,2013),这也使得南极陆架近海的研究进展十分缓慢,严重制约着地球系统模式的模拟能力和未来海平面变化的预测能力。
本文的研究区域普里兹湾(60°S以南,60°~90°E)位于南大洋的印度洋扇区,是南极大陆周围除威德尔海和罗斯海之外的第三大海湾(乐肯堂,1995)。普里兹湾是我国进行南大洋科学考察的重点研究海域,在国际极地海洋学研究中具有重要地位,但观测数据的稀缺严重限制了对普里兹湾海洋、海冰、冰架和大气相互作用过程的理解。迄今我国已组织了36次南极考察,绝大多数以普里兹湾为重。湾内的埃默里冰架是东南极最大的冰架,水平面积约62 000 km2(Liu et al.,2017)。东南极约16%的冰量通过埃默里冰架流入海洋(Allison,1979)。观测和模拟结果表明较暖海水可到达冰架底部,同时冰架底部融化形成的出流水对陆架海洋环境有显著影响(Foldvik et al.,2004;Williams et al.,2016)。暖水入侵的机制,尤其是与地形有关的中小尺度过程方面,仍需要加强观测和改进模拟进行深入的研究。而海底地形作为数值模式的底部固壁边界条件,对数值模拟的结果有关键影响。
为了增加普里兹湾区域有效的水深观测数量,填补传统测深数据的空缺,本研究引入大量的水文观测资料中的深度数据。类似的方法在南极半岛附近研究中有过应用,Padman et al.(2010)通过将一定范围内海豹的多次潜水中最深的一次潜水深度确定为触底深度,开发了一套基于海豹观测的水深测量图,改进了跨南别林斯豪森海大陆架的海槽地形。Schmidtko et al.(2014)在研究南极大陆架底层水变暖问题时也曾提出有5%的CTD剖面的最大观测水深比ETOPO-1的海床深度还要深150 m,这个深度可以为测绘的水深地形提供不确定性估计。所以本研究通过提取传统水文观测数据中的深度信息,与IBCSO V1对比后通过插值方法进一步修正该区域的地形。在文章中描述了用到的水文数据源,介绍了如何改进生成普里兹湾海域新的数字水深模型(Digital Bathymetry Model,DBM),并且将其与IBCSO V1进行比较以说明差异。
1 数据和方法
1.1 数据
搜集时间范围为1980—2019年,空间范围为60°S以南、60°~90°E的多国水文观测资料,提取其中水深数据来补充现有的水深观测。用到的数据集包括世界海洋数据库2018版(World Ocean Database 2018,WOD18)、MEOP(Marine Mammals Exploring the Oceans Pole to Pole)和Argo。WOD18是美国国家海洋和大气局(NOAA)下属的国家环境信息中心(NCEI)制作的经过科学质量控制的数据库,根据观测仪器的不同存储在不同的数据集中,每个子集代表一组类似的海洋探测器(Boyer et al.,2013;Garcia et al.,2018)。对于文章所需研究的普里兹湾区域,用到的包括APB(Autonomous Pinniped Bathythermograph)、CTD(high-resolution Conductivity-Temperature-Depth Data)、OSD(Ocean Station Data)、MBT(Mechanical Bathythermograph Data)、XBT(Expendable Bathythermograph Data)和PFL(Profiling Float Data)这些子集。MEOP是旨在通过海洋动物作为搜集平台建立海洋数据库(http://www.meop.net/)的项目。对于极地海洋,尤其是陆架海区域,是获取温度和盐度分布的重要方式,极大地提高了极地海洋观测的时空范围(Treasure et al.,2017)。
1.2 方法
1.2.1 水文数据的预处理
在提取深度信息时,对所有水文资料做了严格的质量控制。首先按照各数据集提供的原始质量控制标记对原数据中质量不好的站点和变量信息进行剔除(Garcia et al.,2018;Argo Data Management Team,2019)。对于一次剖线观测,确保每一深度测量至少对应有盐度或温度变量中的一种。通过温盐信息去除与周围水团性质存在明显差异和存在密度倒置情况的异常观测点。
WOD的子集APB和PFL分别与MEOP和Argo数据集存在大量的重叠观测,需要进行去除重复观测的工作。为了便于与IBCSO V1数据进行对比,将水文观测资料划分到与其位置距离最近的IBCSO V1网格单元中。参考Schmidtko et al.(2014)的方案,考虑到数据存储过程中纬度、经度和时间上的舍入误差,默认在同一个网格单元(500 m×500 m)中且时间间隔小于2 h的数据为同一次观测。经过去重处理后,共计得到41 466个观测站点,来自海豹观测的水文站点所占比例最高,达到95.7%,以海豹作为观测平台获取的数据大大支持了极地海洋的研究。三种水文资料在垂直方向上提供的深度相关信息略有区别,对此进行了统一。WOD18直接给出了深度信息,而Argo和MEOP资料提供的是海水的压强信息。利用matlab程序的Gibbs Seawater(GSW)工具包,依据2010年海水热动力学方程(Thermodynamic Equation of Seawater 2010,TEOS-10)将压强转化为深度信息。WOD18数据中的MBT和XBT子集由于观测仪器的问题,存在着深度变量的观测误差,本研究选用了Gouretski and Reseghetti(2010)的校正方案。
将每次剖线的最大测量深度记录为Dmax。然后提取出每个网格单元中的水文观测深度最大值,与IBCSO中原有水深数据进行对比,详细的分析将在第二节描述。
1.2.2 插值方法
gridfit方法(D’Errico,2006;https://ww2.mathworks.cn/matlabcentral/fileexchange/8998-surface-fitting-using-gridfit)是基于线性最小二乘插值的表面建模算法(Langley et al.,2014),能够处理稀疏或不规则的数据,并拟合一个与数据一致的平滑面。其对噪声和异常值具有很好的鲁棒性。Langley et al.(2014)在处理雷达资料获取的Fimbul冰架冰厚和表面高程时就曾使用该方法进行网格化。使用该方法对处理后的水文观测深度以及原有多波束等测深观测进行处理。IBCSO V1中的单波束、多波束以及数字化海图为来源的数据点以及经上述步骤提取的水文深度点作为水深控制点,在拟合过程中保持不变。
2 分析和结果
2.1 原始地形数据的选取
目前国际上已发布多个包括普里兹湾区域的全球或半球范围的地形数据集。2013年发布的Bedmap2是目前描绘冰盖和冰架地形特征最先进的环南极数据集,空间分辨率为1 km(Fretwell et al.,2013),包含有冰盖和冰架的表面高程、冰架的吃水深度以及冰架下的海床深度等信息。Bedmap2在南极大陆沿岸水深测量结果和冰盖表面高程数据之间的过渡地带表现良好(Fretwell et al.,2012)。尽管近年来不断地有利用地震测量数据、航空雷达和重力计数据以及冰架下雷达观测,针对某个特定冰架区域,对Bedmap2刻画不是很完善的地形细节进行更深入的研究和修正(Greenbaum et al.,2015;Millan et al.,2017;Rosier et al.,2018;Smith et al.,2020),但本研究并不涉及冰盖和冰架部分,后续发布的一些半球或全球地形数据集在这部分区域也主要参考Bedmap2(Arndt et al.,2013;Schaffer et al.,2016;Mayer et al.,2018),所以文章对这部分不进行讨论。作为通用海洋水深测量图(GEBCO)的南极区域制图项目,IBCSO V1于2013年发布,目的是为南极大陆附近海域编制高分辨率的测深图。采用了来自15个国家30个机构的水深数据,范围为60°S以南,是一个网格为500 m×500 m的覆盖整个南大洋的数字水深模型(Arndt et al.,2013)。而发布时间稍晚于IBCSO V1的RTopo-2(Schaffer et al.,2016)和GEBCO依托SEABED 2030计划每年更新的经纬度坐标下的测深数据产品GEBCO_2019的工作重点更倾向于融合全球范围内现有的区域地形数据集,在南大洋部分其深度测量数据也源自IBCSO V1中的多波束、单波束测量。
为了验证IBCSO V1的可靠性,将其与GEBCO_2019进行了对比。将GEBCO_2019插值到与IBCSO V1相同的极球面投影下500 m×500 m的网格中,比较两者的差异(图1b、c)。差异大约为60 m,主要集中表现在陆架坡折处以及沿岸区域。图1b和c中黑色区域为两套数据中源自Bedmap2数据的区域,也即是陆地部分和冰架部分,在埃默里冰架部分两套数据源于Bedmap2数据的覆盖范围存在差异。与IBCSO V1相比,GEBCO_2019在普里兹湾及其周围海域沿用了IBCSO V1中的单波束和多波束测深数据,未能对此前数据空缺的区域进行有效地填充。两者的差异主要体现在插值获得的网格单元上,这可能是由于不同网格之间的转化带来的插值误差以及两套产品制作过程中对于插值点插值方法的处理有所不同而导致的。此外,IBCSO V1采用极球面投影,可以避免靠近极点引发的奇异性问题,也方便了后续将水文资料分配到等面积的网格单元中进行处理。总的来说,本研究继续采用IBCSO V1作为改进地形的基础,是较为合理的。
2.2 IBCSO V1的基本概况
IBCSO V1包含有冰盖和冰架区域的表面高程信息和基岩深度信息,本研究用到的是普里兹湾及其周围海域范围内的IBCSO V1的基岩深度数据(图1a)。基岩深度在海洋内表现为海床深度(在海洋内除冰架区域外也可称作水深;而在冰架区域由于存在冰架吃水厚度,故不能称之为水深),在南极大陆区域则为陆地表面高程。对于每一个网格单元,IBCSO V1提供了该网格单元对应的深度数据的来源,以六位数字编码的源标识码(Source Identification)表示。本研究区域内的数据来源包含Bedmap2,多波束回声测深,单波束回声测深,海图,GEBCO_08、岸线控制点和利用插值手段推测出的插值点。其中Bedmap2被用于构建冰盖和冰架区域基岩深度数据(如图1a和b中黑色阴影部分所示)。深海区域则多采用基于重力卫星的GEBCO_08探测水深。源标识码为多波束、单波束测深以及海图的网格单元是通过现场观测获得的数据点(图1d),作为传统的测深数据,在本研究中被认为是可靠的。而利用插值方法获得的数据点则是本次地形订正的重点部分。
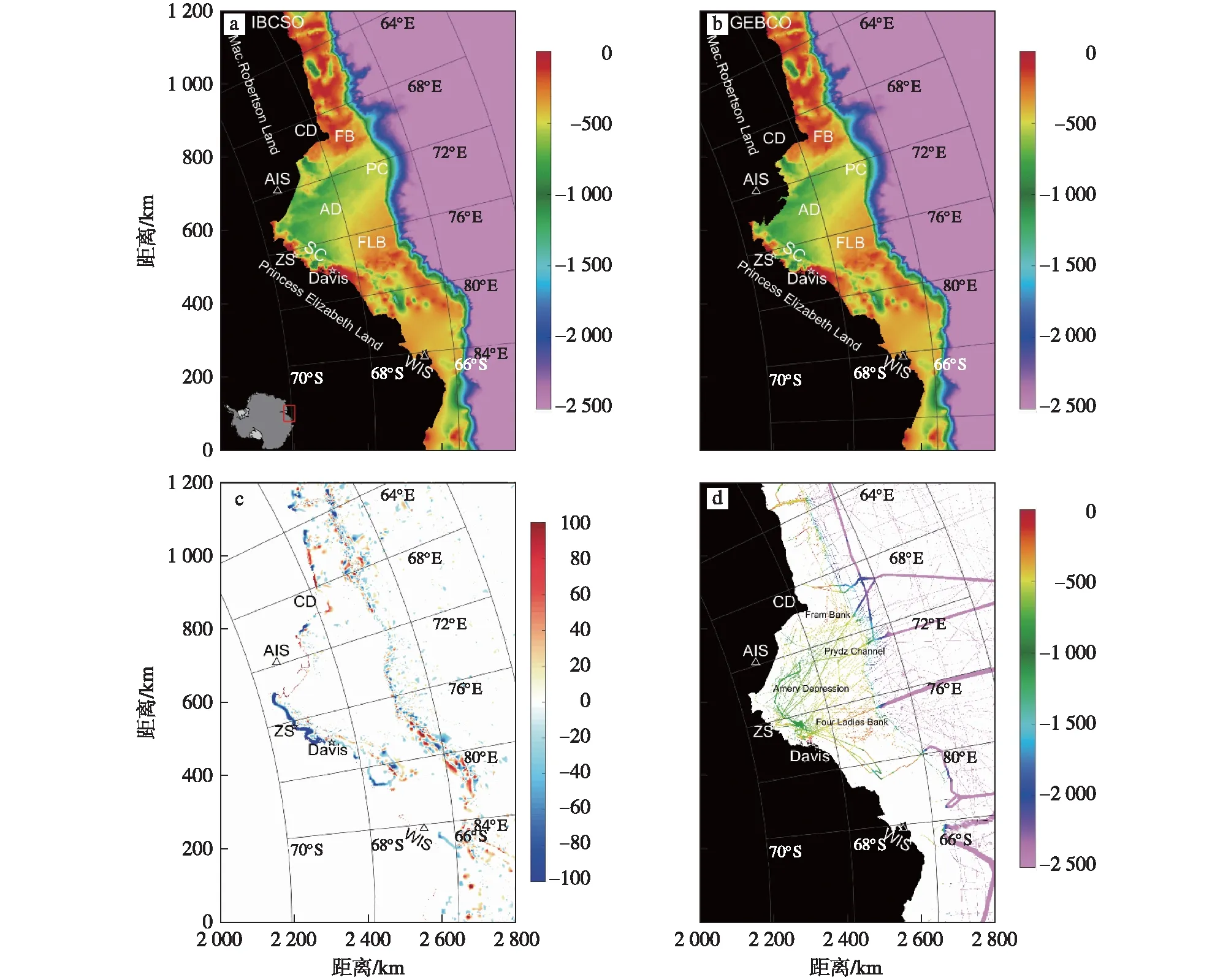
图1 IBCSO V1的海床深度(a;单位:m;黑色阴影为IBCSO V1取自Bedmap2数据集南极大陆冰盖及冰架区域(下同);左下角插图中红框显示为本研究位于南极大陆的具体位置),GEBCO_2019海床深度(b)。GEBCO_2019与IBCSO V1的海床深度的差别(c)以及IBCSO V1中来源于单波束和多波束以及数字化海图的位置的海床深度(d)Fig.1 (a) Bathymetry (m) for Prydz Bay and its adjacent seas from IBCSO Version 1.0.Topographical features marked at the corresponding locations,such as the Amery Ice Shelf(AIS),West Ice Shelf(WIS),Cape Darnley(CD),Fram Bank(FB),Four Ladies Bank(FLB),as well as so on.Grounded ice and land shaded in black.The yellow box in the inset shows the location of the region of interest.(b) Same as (a),but from GEBCO_2019 grid.(c) The difference in seabed depth between GEBCO_2019 and IBCSO V1.(d) Seabed depth at the grids in IBCSO V1 sourced from single-beam sounding,multi-beam sounding,and nautical charts
普里兹湾的主要地形特征如图1a和b所示。湾的南部与埃默里冰架(Amery Ice Shelf)相连,东西两侧分别为四女士浅滩(Four Ladies Bank)和弗拉姆浅滩(Fram Bank),水深大约为200 m。两个浅滩的中间是一块宽度约为40 km、水深约为600 m 的洼地——埃默里海槽(Amery Depression),充当了暖而咸的绕极深层水(CDW)到达冰架前缘的天然通道(Herraiz-Borreguero et al.,2015)。而普里兹海峡(Prydz Channel)和斯文纳海峡(Svenner Channel)则是湾外海水入侵海槽的两条渠道(图6)。陆架坡折处水深变化剧烈,在除海槽外的区域迅速从500 m变化到1 500 m,1 000 m等深线大致分隔了陆架海与开阔大洋。在陆地部分,埃默里冰架的东侧为伊丽莎白公主地(Princess Elizabeth Land),其沿岸区域设置有两个南极科考站,中山站(Zhongshan Station)和戴维斯站(Davis Station)。东部则是西冰架(West Ice Shelf),其中心位置大致位于84°E、67°S。埃默里冰架的西侧是麦克罗伯逊地(Mac Robertson Land),其沿岸的达恩利角(Cape Darney)通常作为普里兹湾的西边界。
然而从整个南大洋区域来看,IBCSO V1中仅有约17%的海洋网格单元直接受观测数据约束。其中,受多波束测深数据约束的约占15.4%,受单波束约束的约占1.4%,其余83%的网格单元不包含任何现场观测值,它们是通过测量值之间的插值或融合重力卫星观测水深测量值来确定的(Arndt et al.,2013),可以说南大洋的大部分海床深度仍未得到直接的观测。这种情况在本文研究区域内更加严重,仅有4.89%和4.86%的网格单元分别受多波束和单波束数据控制。
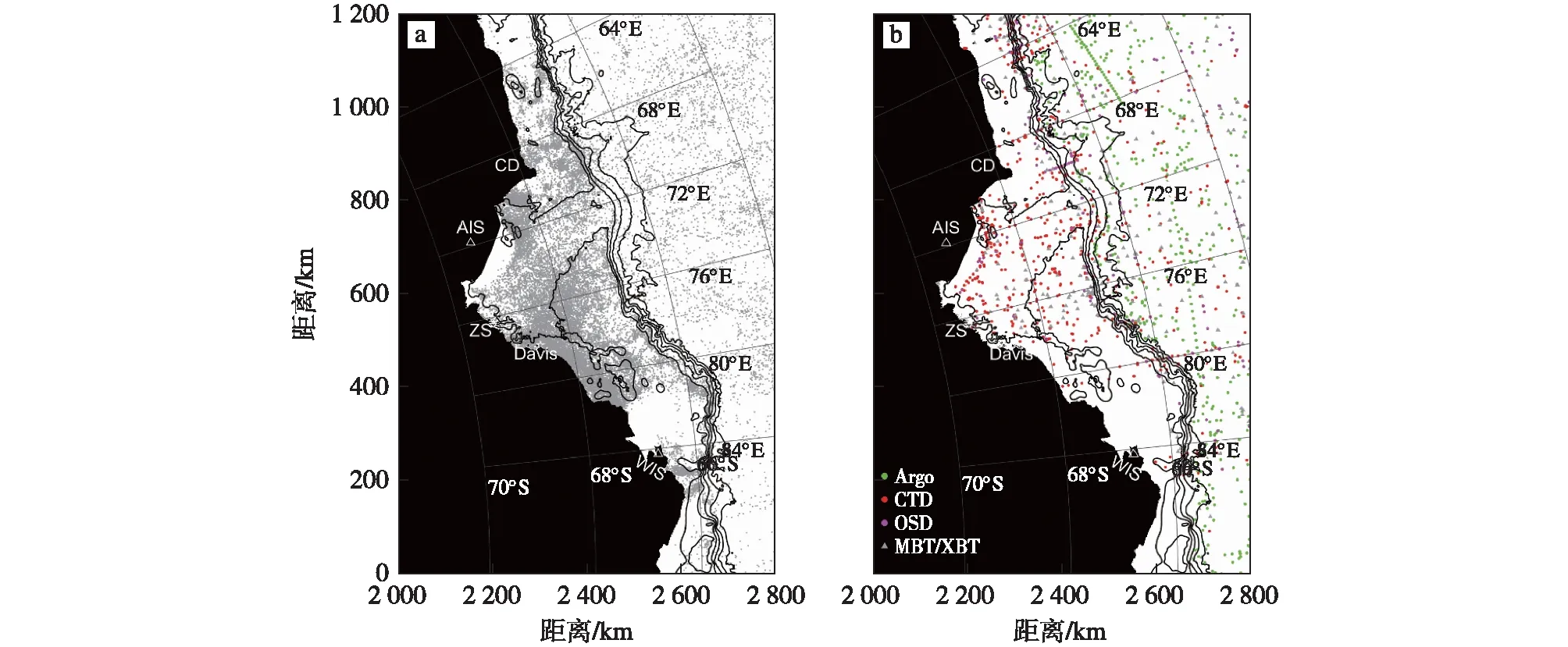
图2 水文观测站点分布:(a)海豹站点(包含MEOP和APB数据集);(b)其他水文站点(绿色圆圈:Argo和PFL;红色圆圈:CTD;紫色圆圈:OSD;灰色三角形:MBT和XBT;黑色填充部分同图1a;黑色细线表示IBCSO V1中的500 ~2 500 m水深等值线,间隔为500 m)Fig.2 Distribution of in situ hydrography observations:(a) seal-borne observations (including MEOP and APB);(b) other hydrographic stations,including Argo and PFL (green dots),CTD (red dots),OSD (purple dots),MBT and XBT stations (grey triangles).Regions shaded in black are the same as in Figure 1a.The thin black lines are bathymetric contours from IBCSO V1 from 500 to 2 500 m with an interval of 500 m
研究区域内IBCSO V1中源于现场观测的网格单元的水深情况如图1d所示,这些网格单元的值在修订后的水深模型中保持不变。其中多波束测深数据大致沿73°E、76°E的经向断面以及66°S纬向断面分布。单波束数据在普利兹湾内较为密集,多分布在埃默里海槽内以及四女士浅滩。而中山站和戴维斯站附近近岸海域的单波束观测密度在环南极区域都是相当大的(Ardnt et al.,2013)。但两者合计占海洋部分网格单元的比例仍小于10%。此外还包含有极少量源于国家地理空间情报局在1995—1997年发布的海图中的数据,占总网格数的0.11%。
图1d中的空白区域显示的通过插值手段获得的网格单元以及少量的处于深海中基于重力卫星数据的网格单元。插值点所占网格单元的比例高达89.85%,在水深小于800 m的陆架海区域(以800 m等深线为限制大致能包括陆架上除个别深槽外的大部分区域),这个比例还要更高一些。除去中山站和戴维斯站之间的沿岸海域,靠近南极大陆的沿岸,都存在着大量的空白区。如埃默里冰架前缘附近,达恩利角以西等区域,戴维斯站一直到西冰架的沿岸海域,特别是西冰架向北一直延伸到陆架坡折处,则几乎没有可靠的测深数据网格单元,水深信息极不可靠。总的来说,IBCSO V1中普里兹湾区域的部分数据不够准确,限制了探索和了解该区域极地关键海洋过程和海底形态的能力。
2.3 水文资料分布情况
引入水文数据来补充目前较为稀缺的多波束和单波束测深数据量,其分布情况如图2所示。由海豹获取的水文观测占了绝大多数,共计获得34 463次剖线。海豹观测也主要集中在陆架上,在埃默里海槽、弗拉姆浅滩、四女士浅滩的密度都比较大,更重要的是,戴维斯站附近及其以东区域(延伸到82°E附近),西冰架东北部以及陆架上的一些小型深槽内等缺少有效的现场测深数据的位置,都有比较密集的海豹观测站位分布(图2a)。Argo数据则几乎分布在陆坡以北的大洋内。其他的水文观测数据基本是通过南极科考船获得的现场观测,其分布与单波束和多波束观测位置分布有一定的一致性(图2b)。
2.4 水文观测中深度数据的评估
本文重点分析了数量上占绝大多数的海豹观测。通过给海豹搭载温盐深仪-卫星中继数据记录器(CTD-satellite relay data logger,CTD-SRDL tags),可以利用它们观测水文状况。海豹的位置信息由集成在CTD-SRDL中的Argos PTT通过Argos通信系统估计。其好处在于不仅可以传输数据,也能估计海豹的潜水位置,不需要搭载额外确定位置的传感器,从而减小了仪器的尺寸并节省能量消耗(Boehme et al.,2009)。但位置精度不是很高,大概存在2~5 km的误差(Boehme et al.,2009;Padman et al.,2010;http://www.meop.net/meop-portal/ctd-srdl-technology.html)。但当一个区域被密集采样时,海豹潜水的位置估计的整体质量会得到显著提高(Padman et al.,2010),触底的可能性也会增加。鉴于海豹资料大多分布在陆架上,本节的分析结果也限制于陆架海区域。
为了获得海豹下潜触底的概率,参考Padman et al.(2010)的做法,将一次海豹下潜的最大深度(D)与一定搜索半径r范围内的多波束或单波束测深数据进行了比较(图3)。在陆架上活动时,海豹有时在海底或海底附近觅食,因此它们一部分潜水活动能够触及到海底(McConnell et al.,1992;McConnell and Fedak,1996)。绝大多数海豹潜水观测都位于陆架上,潜水深度最大值的平均值为352.91 m,仅有252次海豹潜水观测点超过了1 000 m,占海豹观测总数的0.63%。搜索半径r的选取考虑到以下几个方面:找到足够多的传统测深数据和海豹数据;海豹潜水位置估计的不确定性(2~5 km);搜索半径r的增加会导致由真实水深变化而造成的水深不确定性增加(Padman et al.,2010)。最终将搜索半径r确定为2 km,搜索以一次海豹潜水位置为中心的2 km半径内的传统测深数据,计算其平均值Hav和最大值Hmax。共计在14 729个海豹站点附近搜索到了传统测深数据观测,占海豹观测数量的41.96%。由于每次海豹下潜不一定需要触底,陆架上的D大多数都远小于Hav和Hmax(图3a、b、d)。Hav和Hmax之间差异的平均值约为19 m(图3c)。如果将D与Hav相差在20 m以内视为海豹观测触底,对于Hav<800 m的情况下,约有24%的触底概率。值得注意的是,除去触底观测的情况外,有18%的海豹站点的D超过Hav,甚至有836个站点的差异达到了百米以上(图3d)。造成这种较大差异的原因固然有海豹观测位置定位存在2~5 km的误差(Boehme et al.,2009;Padman et al.,2010),以及由此造成的真实水深变化的影响,但也确实存在着目前传统测深数据没有探测到的小区域深水点的可能。同时普里兹湾区域分布较为密集的单波束测深数据本身的质量也值得去验证。
比较位于陆架上的除海豹观测之外的其他水文资料,与海豹观测的情况较为类似。但其他水文资料多基于科考船观测,位置的精度要远远高于海豹数据,所以搜索半径设定为500 m,与IBCSO V1网格间距一致。36.5%的观测站点触及到了海底,绝大多数D小于Hmax,但也存在极少数站点的D深于Hmax约50~100 m(图略)。
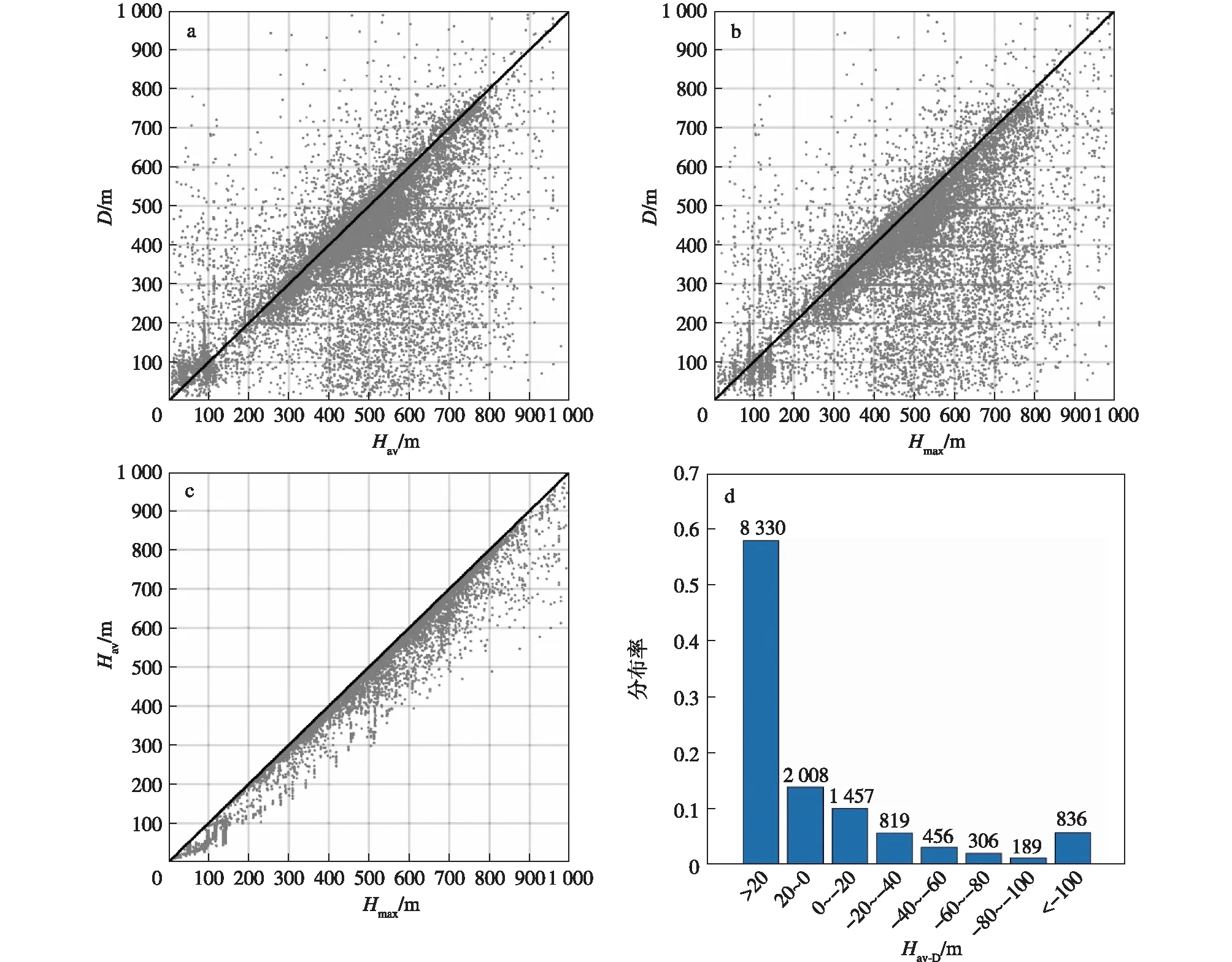
图3 海豹站点观测深度最大值D和其半径2 km范围内传统测深数据平均值Hav(a)。海豹站点观测深度最大值D和其半径2 km范围内传统测深数据最大值Hmax(b)。海豹站点半径2 km范围内传统测深数据平均值Hav和最大值Hmax(c)。Hav<800 m情况下,Hav和D差异概率分布(Hav-D)(d)Fig.3 (a) Plot of maximum seal dive depth (D) vs average depth from traditional-sounding data measurements (Hav) within 2 km of each seal dive location for all seal dive locations.(b) Same as Figure 3a,but for maximum depth from traditional-sounding data measurements (Hmax) within 2 km of each seal dive location.(c) The plot of Hav vs Hmax for all traditional-sounding data measurements within 2 km of each seal dive location.(d) Probability distribution map of the difference between Hav and D(Hav-D) under the condition of Hav<800 m
针对陆架上位于IBCSO V1插值网格单元的水文观测站点,做了进一步分析。经过上述一定搜索半径r内的水文观测深度最大值和传统测深数据的比较,确定水文观测深度最大值达到海床深度,即水文观测触底的概率约为25%。假设触底的水文随机分布在样本中,则需要10个或更多的水文站点来保证在一个随机样本中有95%的概率水文观测最大值触及到海底。和与测深数据比较一样,以一个水文观测站点为中心,依旧定义该中心站点深度最大值为D,在其半径r=2 km范围内搜索N个水文观测站点。若N≥10且位于中心处的D是这组水文资料中最大的,将该观测深度确定为触底深度。如果N<10,则不做记录(Padman et al.,2010)。与Padman et al.(2010)的做法稍有不同,本研究仅对位于IBCSO V1插值网格单元且观测深度最大值大于原始值的水文观测站点进行了上述处理,一定程度上避免了一些虚假的触底深度点。该方法确定的触底深度点基本分布在戴维斯站以东一直到82°E的南极大陆沿岸,少量分布在埃默里冰架前缘西部和西冰架前缘东部,这也与海豹资料分布最为密集的区域一致(图4)。站点数量的高密度分布也降低了海豹站点位置信息估计的误差,使得利用水文资料的深度对这些网格单元的修正较为可靠。触底深度与原网格单元的值差异约为100 m(图4b)。而对于极少数位于陆架坡折附近的确定为触底观测的站点,由于陆架坡折处等深线密集,地形变化剧烈,定位误差带来的影响很大,值得在以后的研究中进一步确认。总的来说,触底观测密集分布的戴维斯站以东至82°E的南极大陆沿岸、埃默里冰架前缘西部和西冰架前缘东侧是与当前地形数据集相比,海床深度需要加深的可能性最大的区域,而该区域目前也缺乏有效的传统测深数据,迫切地需要在未来有关普里兹湾的调查中针对性地进行现场观测来加以验证。
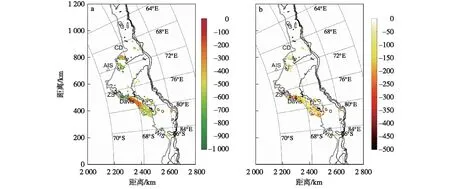
图4 位于插值网格单元的水文观测数据中的触底观测深度(a;单位:m)。触底观测深度和距离该水文站点最近的IBCSO V1网格单元值的差异(b;灰线为IBCSO V1中的陆地和冰架边缘线;黑色细线表示IBCSO V1中的500~1 500 m等深线,间隔为500 m)Fig.4 (a) Bottom depth (m) of hydrography stations considered as benthic observations (see section 2.4).(b) Difference between the bottom depth of benthic remarks and the nearest IBCSO V1 grid value.Bathymetric contours from IBCSO V1 are drawn every 500 m from 500 to 1 500
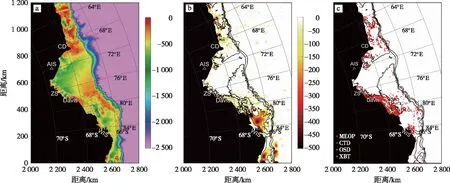
图5 修正后的地形(a;单位:m)。新修正的海床深度减去IBCSO中原始海床深度(b)。用于订正IBCSO V1且深度大于原始值100 m的水文资料站点(c;黑色填充部分同图1a。图5b和c中的黑色细线分别为修正后的地形数据和IBCSO V1中500~1 500 m等深线,间隔为500 m)Fig.5 (a) Revised bathymetry (m) for Prydz Bay and its adjacent seas.(b) Difference between the revised bathymetry and IBCSO V1.(c) Distribution of hydrography observations that result in the bathymetry difference in (b) of above 100 m.The region shaded in black in (a),(b),and (c) is the same as in Figure 1a.The thin black lines in (b) and (c) are bathymetric contours drawn every 500 m from 500 to 1 500 from the revised bathymetry and IBCSO V1,respectively
2.5 修正后的地形
利用提取到各插值网格单元中的水文观测深度的最大值,对IBCSO V1海床深度进行修正。由于采用不同的仪器且数据采集时间跨度大(1980—2019年),因此导致水文资料提取的水深数据质量参差不齐,在处理中删去了与周围数据差异明显的离群点。考虑到海浪、潮汐等作用引起的海平面波动,以及实际水文站点的位置与IBCSO V1网格的中心点存在的距离差异,忽略差距在10 m以内的,最终用于地形修正的水文资料共计8 879个,源于MEOP的有7 903个,源于APB的897个,剩下的79个则是由CTD、OSD和XBT提供。用于订正地形的水文资料深度与IBCSO V1中原始值差异在100 m以内的占63.36%,而差异超过100 m的水文修正深度站点,主要分布在弗拉姆浅滩、中山站和戴维斯站以东一直延伸到82°E的沿岸区域以及西冰架前缘附近(图5c)。
修正后新的普里兹湾及其周围海域的水深地形图如图5a所示。与IBCSO V1相比,除了单波束测深数据分布较为密集的埃默里海槽和四女士浅滩区域外,其他区域均有一定的改动。上一节介绍的确定为触底观测的站点所处位置是新的地形图修正最为可靠的地方,普遍加深约50 m。陆架坡折附近零星的深槽点可能是由于海豹观测位置信息误差造成的,此处真实水深变化剧烈,尽管不确定性较大,但依然在修正后的地形中予以保留,为以后进一步修正地形提供线索。达恩利角以西的陆架区域(64°~68°E)是改动较为明显的区域,其在IBCSO V1中存在一些小洼地的区域的海床深度有了进一步的加深,洼地范围也有所扩大。而西冰架的附近则是差异最大的地方,这片区域缺少测深数据的限制,地形深度修正值达到了400 m甚至以上。修正后的地形显示西冰架前缘附近出现了一个与四女士浅滩南侧海槽连通的洼地,平均深度约为600 m。并且原本在四女士浅滩东南侧存在的位于80°~81.5°E的海槽宽度有所扩大,深度加深不是很明显。82°E附近出现的深槽有待于进一步验证,这可能是由于插值方法处理过程中产生的虚假地形特征,但也值得在以后的现场观测中进一步考证。
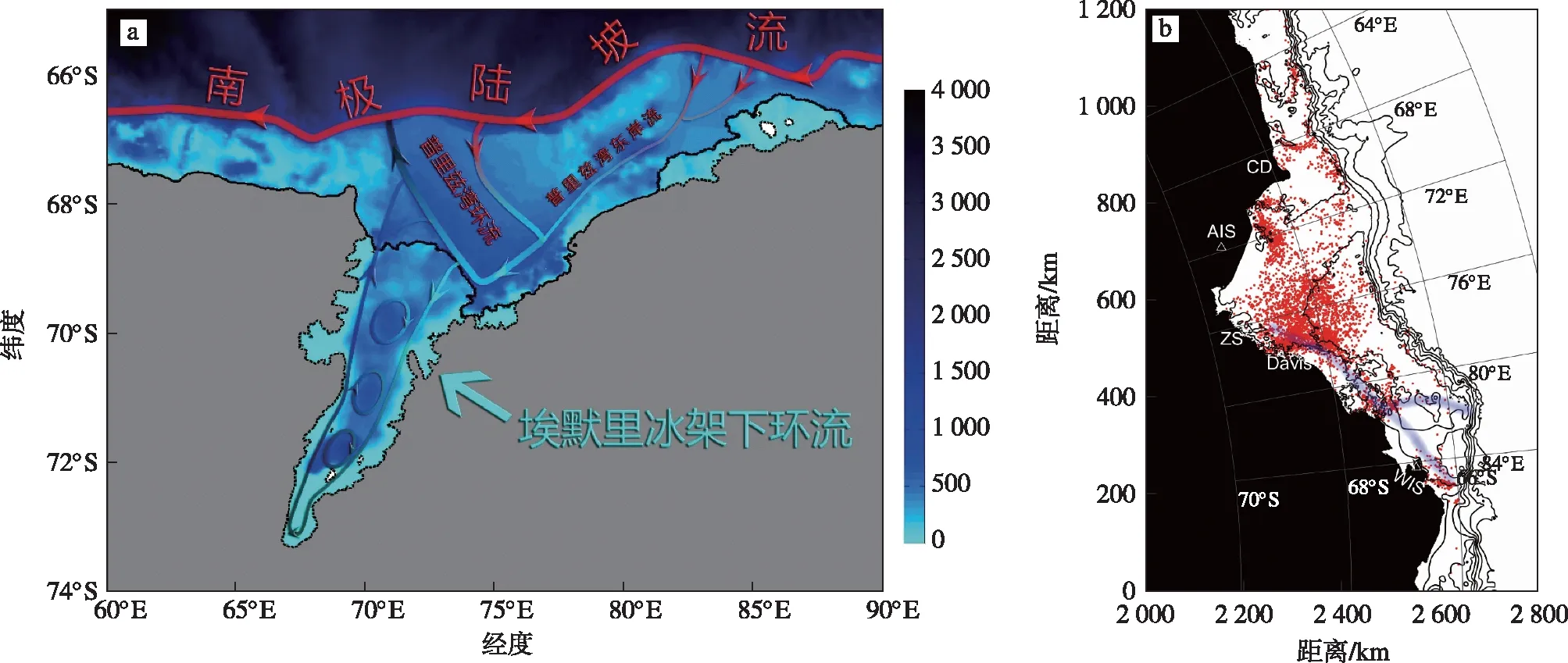
图6 普里兹湾及其周围海域环流示意(a),普里兹湾内mCDW的分布(b;红色圆点;以整个水柱最大位势温度进行判别,显示了mCDW的入侵路径)Fig.6 (a) Schematic diagram of the flow pattern in our study region.(b) Distribution of Modified circumpolar deep water (mCDW).Maximum potential temperature (θ in ℃) associated with intrusions of mCDW (red circles,27.72<ρ<27.85 kg·m-3,-1.85<θmax<-1 ℃) into Prydz Bay
此外,修正后的地形图中可以较为清晰地看出西冰架附近的洼地在82°E和85°E的陆架坡折处与外海存在两个深度约500 m的狭窄通道,使得暖水能够跨越陆坡入侵到陆架上,而这一点在IBCSO V1中体现得不明显。通过普里兹湾内环流示意(图6a,Liu et al.,2017)可以发现,普里兹湾暖水入侵的两个关键方式,一个是沿着四女士浅滩西侧气旋性普里兹湾环流的东支;另一个则是由上游西冰架北部陆架形成的绕行四女士浅滩南侧普里兹湾东岸流(Liu et al.,2017)。利用海豹观测数据绘制的普里兹湾mCDW分布图(图6b)也能够证明这一点。暖水入侵会导致冰架底部融化速率变大(Rignot et al.,2013),对冰川流动和稳定性起着重要的控制作用(Millan et al.,2017)。目前埃默里海槽作为暖水入侵的通道已广为人接受,但修订后地形图所揭示的西冰架北侧与外海连接的洼地的存在以及四女士浅滩南侧海槽的变宽变深可能揭示了对这条暖水入侵通道作用的低估。
3 讨论和结论
以IBCSO V1地形数据为基础,通过引入多源历史水文观测中获得的水深数据,优化了普里兹湾及其附近海域的水深地形分布,揭示了目前较为先进的地形数据中未能给出的一些地形特征,得到的主要结论如下:
1)目前研究区域内传统测深数据比重小,主要集中在埃默里海槽、四女士浅滩以及中山站至戴维斯站的沿岸海域。大量插值点的存在使得地形特征不够准确,限制了理解该区域关键海洋和海底过程的能力。
2)水文观测中的水深数据可以为海底地形的优化提供数据支撑,也为开展物理海洋学方面的其他研究提供了重要的观测依据。水文资料的组成上,基于海豹的观测在数量上占绝对优势。从分布来看,多分布于陆架上,在一定程度上可以改善目前传统测深数据数量不太充足、分布也不均匀的情况。位于IBCSO V1插值点网格单元中,水文观测深度最大值大于网格原始值的水文观测被用于修正地形。这些观测站点基本上为海豹观测,其中确定为触底观测的站点集中分布在埃默里冰架前缘西侧和西冰架前缘附近,以及从中山站一直延伸到82°E的四女士浅滩南侧的沿岸区域,这也是与IBCSO V1相比,需要加深可能性最大的区域。
3)订正后的地形图细化了普里兹湾附近海域的地形结构。表明目前IBCSO V1中存在普里兹湾东侧沿岸区域深度较浅的问题,并揭示了西冰架前缘附近可能存在IBCSO V1中未展示的洼地,拓宽了81°E附近与洼地相连的通道。修正后的地形图更清晰地展示了普里兹湾东岸流连通外海的通道。这条通道的作用在目前的普里兹湾暖水入侵的研究中可能被大大地低估了。
期待订正之后的普里兹湾及其附近海域水深地形数据对解释东南极普里兹湾及其附近海域环流变化发挥重要作用,有助于改进冰-海-气相互作用的区域数值模式。这套数据也将为今后进行更详细的海洋现场调查提供指导。但是需要指出的是,用于订正IBCSO V1的水文资料大都是基于海豹的观测,而其存在着2~5 km的定位误差,所以结果在某些区域有较大的不确定性,更精确的地形还需要由大量的现场单波束或多波束回声测深结果去支撑,也呼吁基于海豹的观测平台能够搭载精度更高的定位装置,提高海豹观测定位的精度。
猜你喜欢
中外文摘(2020年11期)2020-06-29
儿童故事画报·自然探秘(2019年10期)2019-01-14
中外文摘(2017年18期)2017-11-14
中华女子学院学报(2017年4期)2017-09-12
小朋友·快乐手工(2015年6期)2015-07-01