基于捷联惯性导航的煤矿监察执法系统设计与应用
2021-03-04 05:47刘梅华苗可彬
煤炭工程 2021年2期
刘梅华,苗可彬
(1.煤炭科学技术研究院有限公司,北京 100013;2.煤炭资源高效开采与洁净利用国家重点实验室,北京 100013;3.北京市煤矿安全工程技术研究中心,北京 100013)
近年来,随着煤炭生产安全日益增长的需要,煤矿井下移动智能执法成为研究的热点,但行业新技术的推广和普及较为迟缓,目前现有的井下执法设备和系统的性能指标已经远远不能满足要求,执法装备技术水平落后,功能单一,如执法人员需携带多种执法装备:环境参数检测仪、相机、执法导航装备及打印设备等;执法设备未与煤矿井上安全监控平台或当地安监主管部门融合联网形成执法系统,造成执法证据不透明、执法人员执法过程无法跟踪、执法效率无法保证以及执法过程一旦出现事故无法采取及时有效的救援措施等,因此建立一套智能化、一体化执法系统,提高监察执法的高效性、客观性、科学性,实现精准执法势在必行。
针对以上问题,本文提出一种基于捷联惯性导航的煤矿执法系统,该系统能实现规范执法、自主精准导航、井下信息同步、执法轨迹可追踪、为煤矿安全管控云平台提供可信的执法信息[1-3]。
1 执法系统组成
基于捷联惯性导航的煤矿执法系统由执法终端、安全生产执法平台与执法监管云平台组成,执法人员在安全生产执法平台上制定执法计划并导入到执法终端,执法过程采用惯性导航与蓝牙信标定位相融合的自主组合式导航,执法终端执法过程自动采集的环境多参数数据与声音、图片和视频等多种执法证据自动上传至安全生产执法平台服务器,数据经服务器后台处理后共享至执法监管云平台,同时现场生成执法文书[4-6]。执法系统架构如图1所示。
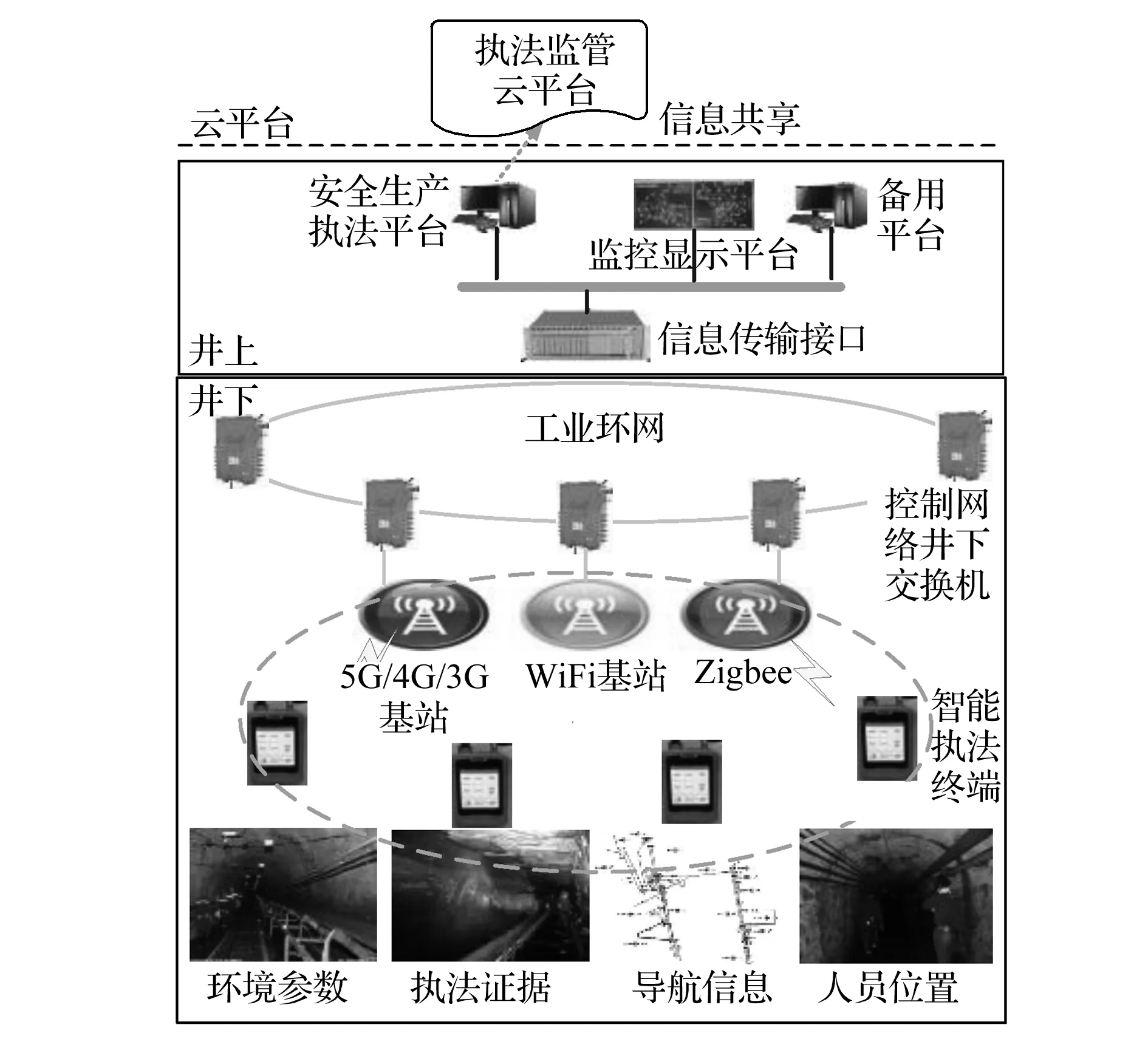
图1 执法系统架构图
2 系统设计
2.1 执法终端设计
执法终端[7]采用的是安卓操作系统,主要由执法登录管理模块、数据采集模块、摄像模块、数据存储模块、报警模块、导航系统模块、数据无线通信模块、照明模块、USB接口组成。执法终端结构如图2所示。
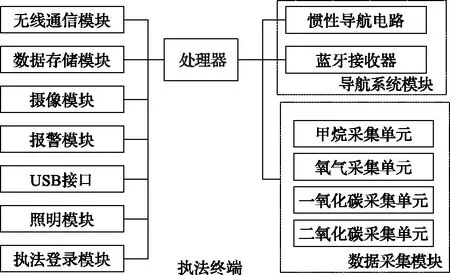
图2 执法终端结构图
其中,执法登录管理模块基于虹膜识别技术[8]与超声波指纹识别技术,兼容多种身份认证登录方式,完成对执法人员身份识别,成功开启执法界面;数据采集模块,采用催化原理和电化学原理集甲烷、氧气、二氧化碳、一氧化碳于一体,构成检测单元,采集执法点环境参数信息;摄像模块采用低照度数字式USB摄像头,照明探头及终端主机上各集成1个USB摄像头,用于录入执法现场视频及照片证据;数据存储模块采用SD存储技术[9],可按执法项目分类实时存储环境气体参数、现场图像、视频、语音信息等执法证据;报警模块采用模块化设计,通过视觉听觉实现环境参数报警与求救报警;导航系统模块硬件上由惯性导航模块和蓝牙模块构成,实现整个执法过程自主精准导航;数据无线通信模块支持Wi-Fi、Zigbee、3G/4G/5G和DTU通信方式用于向服务端发送、接收信号并与之建立无线连接;照明模块采用低功耗,LED冷光源照明,照明方式为主灯与辅灯两种,根据环境切换灯的工作方式。
执法人员依据执法对象制定执法计划,并将其导入执法终端,然后开启执法终端,启动惯性导航,预定执法起点,通过Wi-Fi定位导航初始信息,按导航依次向井下规定执法点执法;到达预定执法点,环境参数模块自动采集各项数据信息,执法人员拍摄图像、视频进行取证(必要时采集音频信息),终端对获取的信息及证据自动存储并上传至井上服务器,执法产生的数据及证据经服务器处理,上传至安全生产执法平台,系统产生执法文书,同时安全执法平台将执法证据及执法文书通过云平台分享到执法监管云平台,用户通过云平台查询执法实时情况。
2.2 导航系统设计
本文提出的导航由惯性导航[10,11]和蓝牙定位组合构成的自主导航系统,基于MEMS[12,13]技术,由MEMS芯片通过组装生产的惯性组合(IMU Inertial Measurement Unit)测量物体三轴角速率以及加速度,加速度计检测物体在载体坐标系统三轴的加速度信号和角速度信号,并以此解算出物体的姿态,然后根据获取的运动轨迹和速度,配合陀螺仪和三轴加速度传感器测量移动的角度和加速度,计算下一刻的位置,并通过电子地图显示,为消除因时间累积产生的位置误差,本文采用惯性导航与蓝牙信标融合定位,运用蓝牙室内定位技术[14,15],通过决策层的融合策略,周期性地纠正惯性导航的误差,同时为了减少轨迹波动,通过改进型Kalman快速滤波算法平滑导航系统融合后的轨迹,以提高系统测量的精度和稳定性。蓝牙信标定位系统框架结构如图3所示。
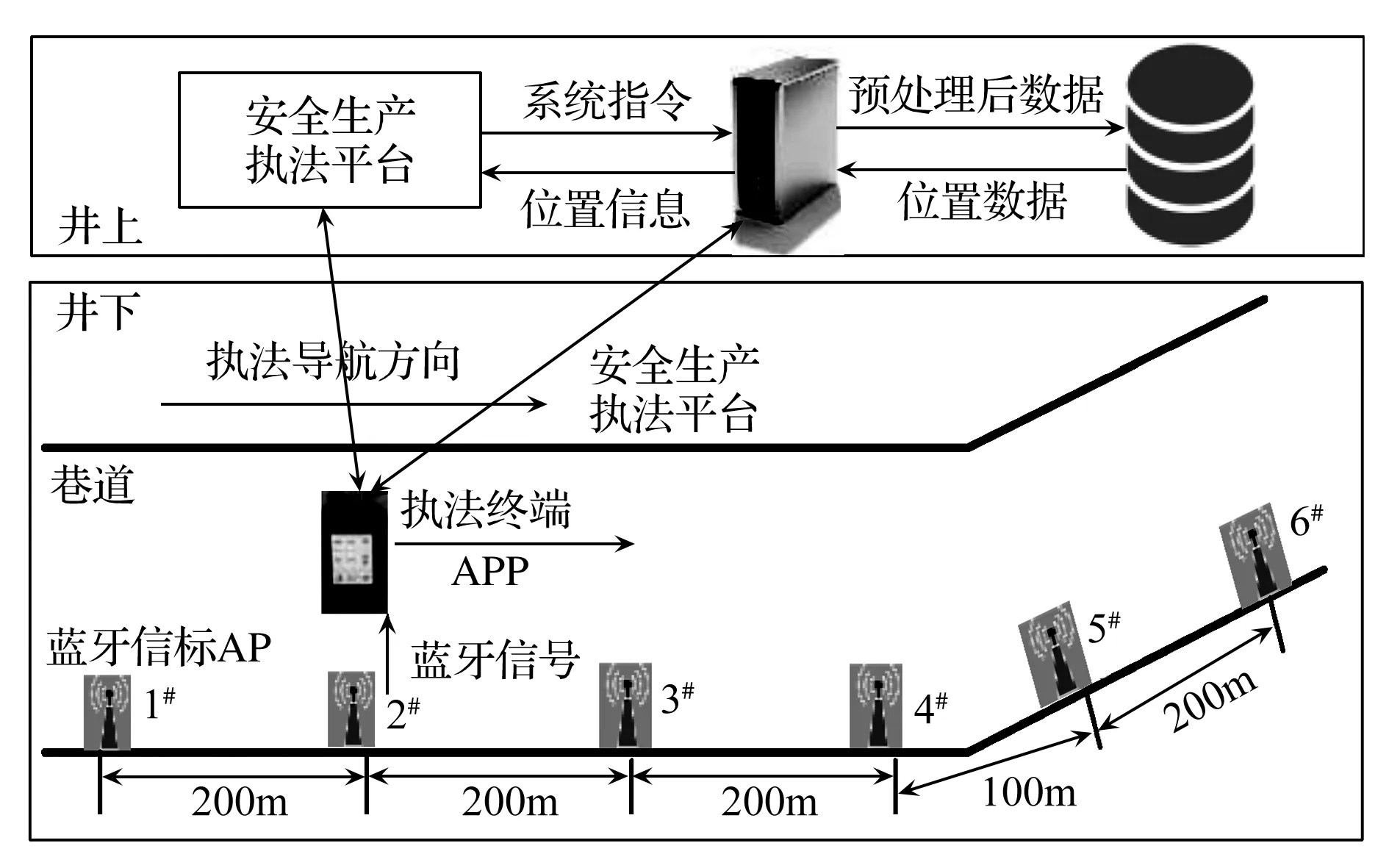
图3 蓝牙信标定位系统框架结构
蓝牙信标定位设计利用执法终端上的蓝牙模块接收布置在巷道上的蓝牙信标AP发送的位置报文,执法终端将接收的报文解码并发送至系统服务器,服务器将接收的信息转换成位置数据并发送至执法终端App,捷联惯性导航系统将接收到的位置数据与自测的位置数据进行融合,获取执法终端的位置信息并显示于导航地图上。
蓝牙信标AP的布置是蓝牙定位设计中非常关键的步骤,依据煤矿井下巷道特性,蓝牙信标在井下无遮挡无转角条件下,蓝牙信标AP间位置按200~300m间隔部署,在有遮挡或转角情况下100m间距部署:预先在后台服务器上,在执法路径的地图上部署蓝牙信标AP,给与每一个蓝牙信标AP唯一标识,依据生成的报表在井下部署蓝牙信标AP,并进行测试,根据测试效果对蓝牙信标AP位置进行调试,同时对后台服务器执法路径地图上的相应蓝牙信标AP位置进行更新。
设计中惯性导航与蓝牙信标定位的融合目标是提供一种井下定位精度更高和鲁棒性更好的捷联惯性导航系统/蓝牙信标融合导航方法,从而达到提供一种精准、过程可跟踪的煤矿井下执法系统,蓝牙与惯性导航融合系统流程如图4所示。具体过程:
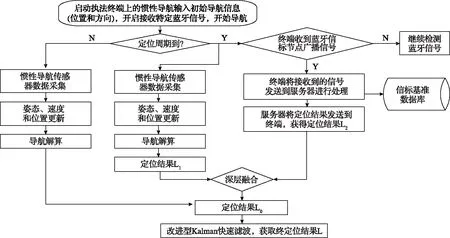
图4 蓝牙与惯性导航融合系统流程
1)对执法终端进行预热,惯性导航输入初始位置信息,开启终端蓝牙接收模块,惯导各传感器采集数据。
2)根据惯性导航传感器采集的终端姿态、速度和位置信息建立捷联式惯性导航状态方程并建立量测方程,计算出定位结果L1;终端将接收到的蓝牙报文解码并发送至系统服务器,经运算,服务器将位置信息(定位结果)L2发送至执法终端APP。
3)以捷联惯性导航系统测量的定位结果L1与蓝牙信标系统测得的定位结果L2为观测量,采用决策层融合策略,建立捷联惯性导航系统/蓝牙信标融合导航系统,获取定位结果。
4)利用改进型Kalman快速滤波算法减少捷联惯性导航系统/蓝牙信标融合导航系统定位轨迹的波动,提升定位精度和稳定性,实现信标节点校正和自主轨迹推算的融合导航定位,执法终端APP上显示整个执法运动轨迹,相应的信息同步在系统监控平台地图上显示。
2.3 安全生产执法平台设计
安全生产执法平台采用C/S架构和实时分布式数据库技术,实现对执法数据实时监控与安全管理,具体可分为数据查询、实时在线监测、执法计划/文书管理与系统管理。安全生产执法平台功能模块如图5所示。

图5 安全生产执法平台功能模块
数据查询单元可实现对历史执法案件信息、执法过程采集的环境参数、音视频、文本信息、执法文书、相关执法对象企业信息等进行调取查看;实时在线监测单元可在线监测执法人员执法位置与路径、执法点获取的执法数据与现场音视频证据以及报警信息;执法计划/文书管理单元根据不同执法对象提供执法计划与执法文书的参考模板,对执法文书编号进行管理,执法人员可在本单元编辑执法计划并导出;系统管理单元可使超级管理员对执法平台的业务系统进行管理和控制,主要实现对平台用户、权限、安全、共享、运行等内容的管理。
2.4 执法监管云平台设计
执法监管云平台基于执法终端、安全生产执法平台的信息共享基础上主要实现监管执法的知识数据服务、安全控制服务、系统展现服务等功能,具体分为监督管理、专家管理、知识库与安全管理。执法监管云平台功能模块如图6所示。
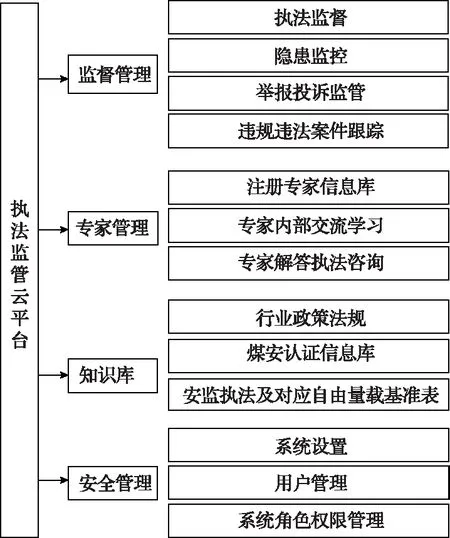
图6 执法监管云平台功能模块
监督管理模块主要对执法进行监督、各类隐患跟踪、监管举报投诉以及对执法过程中发现的违规违法案件全程跟踪处置措施及效果;专家管理模块用于接收注册的专家的资料信息,并将专家的资料信息进行聚类处理,在此基础上形成多个专家交流学习的交互端,同时为了充分利用专家资源开放平台解答执法咨询;知识库模块提供目前行业内有效的行业政策法规以供参考查询、提供矿用设备煤安认证信息查询窗口、提供不同检查目的、检查对象和检查形式的安监执法对应的自由量裁基准表以供查询;安全管理模块主要对系统日常运行进行设置维护、管理员对用户及其权限进行管理。
3 系统工业实验测试与效果
基于捷联惯性导航的煤矿监察执法系统在煤矿进行工业试验,实验人员根据执法计划,携带执法终端,在井下不同执法场所如大巷、变电所、工作面等不同区域执法,执法过程可实现精准导航、各执法点采集的井下环境参数、执法证据:图片、视频、语音信息等均符合设计要求,并能在线传输至安全生产执法平台,同时相应的数据共享到执法监管平台,系统运行稳定,达到设计目标。
对捷联惯性导航系统性能进行测试,捷联导航定位测试表见表1,执法路径1为井口-避难硐室:执法路面较平坦,导航误差为2.5‰;执法路径2为井口-变电所:执法路面有起伏路段,导航误差为2.7‰;执法路径3为变电所-工作面:执法路面起伏较大,导航误差为3.0‰。由测试数据得出:煤矿井下巷道路况不同,蓝牙信标AP的布置间距需要调整,并且路面的起伏程度与巷道转角都会影响导航误差,在井下本导航的最大误差不超过3‰。

表1 捷联导航定位测试表
4 结 语
基于捷联惯性导航的煤矿监察执法系统提高了矿山安全生产监察执法信息化水平和执法信息的可信度,提高了安全监察执法公信力,同时也实现了安监执法的节约化和便捷化,对推动安监执法信息化建设有一定的作用。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
河南科技(2022年7期)2022-05-23
军民两用技术与产品(2021年7期)2021-10-13
舰船科学技术(2021年7期)2021-08-11
科学与财富(2021年33期)2021-05-10
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
发明与创新(2016年17期)2016-12-22
发明与创新·大科技(2016年5期)2016-05-17
汽车文摘(2015年9期)2015-12-10