
国内外行星表面巡视器自主导航技术研究
2021-03-04 04:10解杨敏魏祥泉邹怀武
上海航天 2021年1期
解杨敏,季 力,魏祥泉,陈 萌,邹怀武
(1.上海大学机电工程与自动化学院,上海市机械自动化及机器人重点实验室,上海 200444;2.上海宇航工程系统研究所,上海 201109;3.上海市空间飞行器机构重点实验室,上海 201108)
0 引言
深空探测作为航天技术发展的前沿和趋势,是人类历史上最为复杂的系统工程之一。如图1 所示,在2013 年,随着嫦娥三号着陆器和玉兔号巡视器在月球表面的成功着陆和作业,完成了对月球进行土壤成分研究、化学元素测量、空间环境感知的科学任务,中国跨出了外星球表面勘探的第一步,成为第三个在月球上实现软着陆的国家[1]。
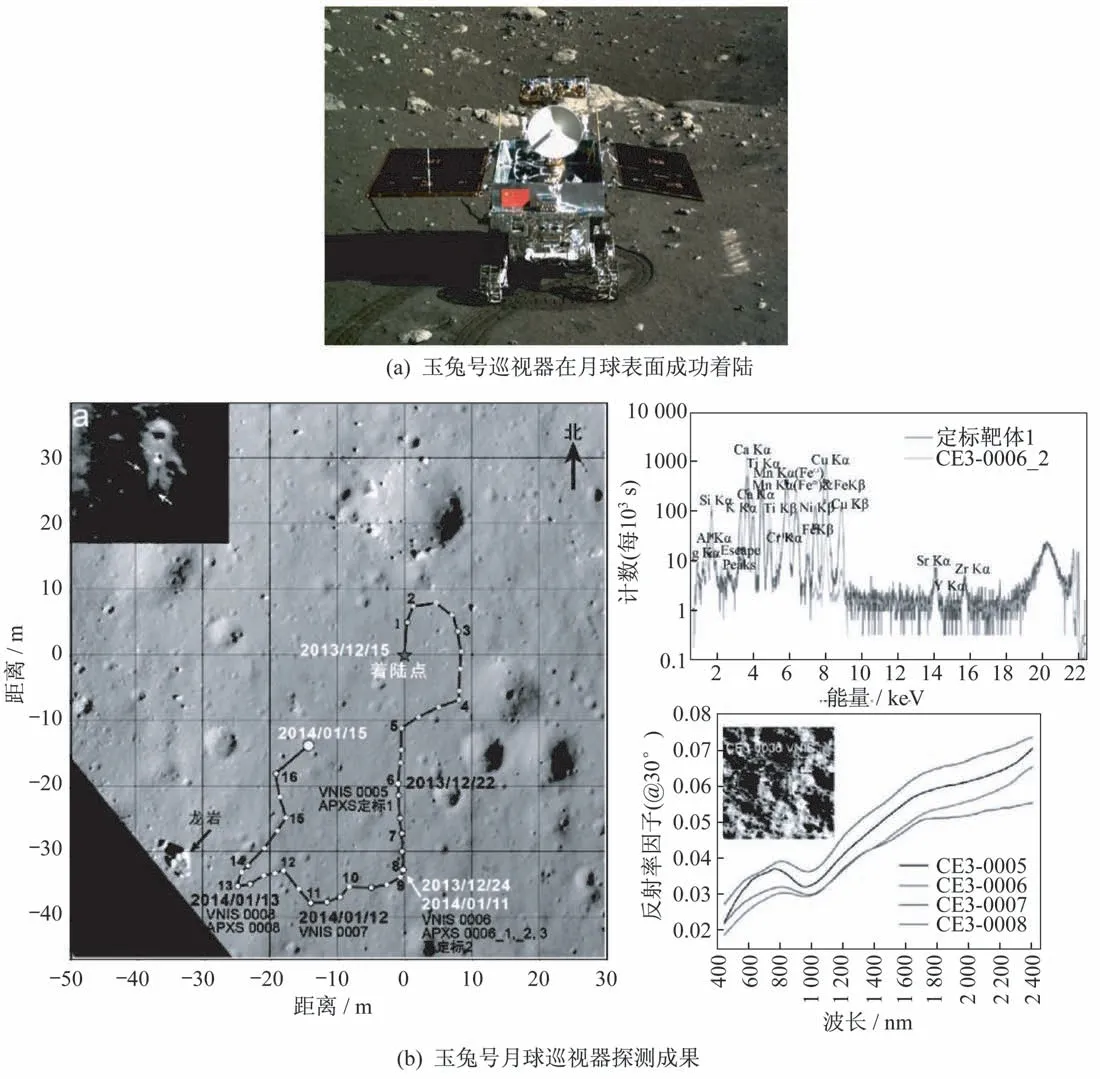
图1 玉兔号月球巡视器[1]Fig.1 Yutu lunar patrol[1]
与此同时,世界各科技强国也纷纷展开各自的深空探测计划。欧洲空间局与俄罗斯开展合作,计划于2020 年前实现火星着陆巡视[2-3]。日本发展的重点是实施多类型小行星的取样返回任务,以保持在小行星探测领域的优势地位[3]。印度计划2020年前实施月球着陆巡视探测和第二次火星探测[2]。美国则计划于2020 年再次发射火星着陆器(如图2所示),为2030 年的载人探火计划做准备[4],并同时启动了重返月球计划[5]。中国在近期和中期计划中将分别对月球和火星进行探测,实现“绕、落、回”和“绕、落、巡”工程目标[6-7]。2018 年12 月,嫦娥四号以软着陆方式登陆月球背面,将利用地月拉格朗日2 点中继卫星首次对月球背面进行巡视探测,实现采样返回任务,并将以5 年、10 年为期开展利用巡视器进行的月球南北极探测[6]。由此可见,在未来10 年的航天科技竞争中,地外星球的着陆探测作业将是深空探测的主要任务之一。
星球巡视器是在星球表面移动作业的无人探测系统,能够对星球表面进行大面积、近距离和接触式的考察,是地外星球着陆探测作业的主要手段[8]。因宇宙空间具有微重力、高真空、强辐射、剧烈变化的温度和亮度等特点,无论在前期空间探测还是后期开发利用阶段都需要依赖巡视器完成人类难以或无法胜任的任务,而其完成各项任务的自主程度则成为衡量巡视器工作性能的重要指标[9]。然而,迄今为止所有在星球作业的星球巡视器都或多或少地依赖于人工决策,自主导航能力不足成为制约其漫游能力的主要原因[10]。
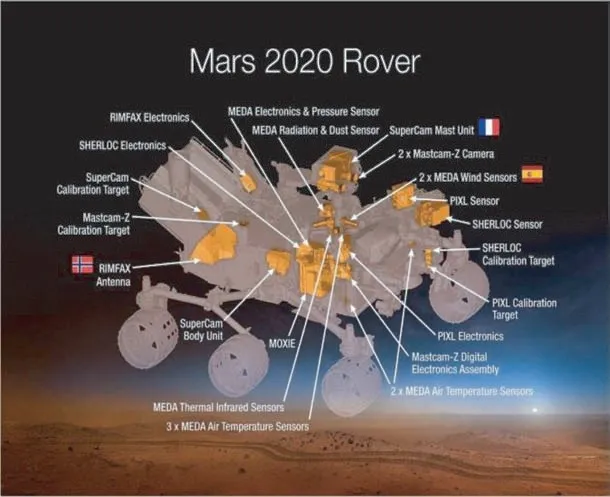
图2 美国NASA 2020 年火星表面巡视器示意图[4]Fig.2 US NASA 2020 Mars Rover schematic[4]
我国对新一代星球巡视器性能指标要求进一步提高,对构建自主、精准、自适应的智能导航系统的需求更为迫切,具体体现在以下几个方面:
1)通信延时的影响。玉兔号与地球指挥中心的通信时间约为1 s,可以满足“信息回传—地面指挥中心处理决策—发送遥控指令”的遥操作序列时间要求。然而,即将进行的月球背面探测需要通过中继星进行与地面的通信,且将出现部分时间段通信中断的情况;而火星距离遥远,信号往返需要20 min 左右[11],因此,在将来的探月和探火计划中过于依赖遥控技术对巡视器进行指挥操作是不现实的。地面站只能向太空发送对星球巡视器的宏观和全局行动指令,而微观和局部的行动则需要通过其感知和导航系统来进行自主规划[9]。
2)长距离探测的任务需求。玉兔号的设计速度为200 m/h,最终活动在着陆器的20 m 范围以内,其整个活动场景和轨迹都可以被着陆器监测到。然而,下一代巡视器将远离着陆器进行工作,如美国对未来巡视器的设计要求为每天行走超过1 km[12],且要求其进行在着陆器几百公里外的探测活动[10,13]。在这样的长距离探测任务中,巡视器在大部分时间将脱离着陆器的监测范围,它必须具有对环境进行精确感知、自我定位并进行地形自适应的自主导航能力,以确保移动过程的高效和安全[12,14]。
3)取样返回的任务需求。美国NASA、欧洲航天局、中国航天局都在未来计划中要求巡视器能够从工作点进行采样返回[15],这对巡视器的自主导航系统,尤其是其全局定位能力提出了更高的要求。与现有的局部定位技术不同,巡视器必须能够在来回途中减少与着陆器相对位置的定位累积误差,根据全局地图及定位制定返回着陆器的路线,实现自主回航[16]。
综上所述,实时定位与环境建模、全局定位信息获取和地形自适应路径规划决策,是星球巡视器在弱通信条件下完成长距离、高效率探测作业和取样返回任务的必备关键技术。融合上述3 项功能的自主导航系统是保障巡视器移动过程的行驶安全、扩展其巡视探测范围、增强其对未知环境适应性、确保采样回归任务成功的前提,对我国深空探测任务目标的实现具有极其重要的意义。
1 星球巡视器自主导航技术概述
无人驾驶系统的一般功能结构流程如图3所示。
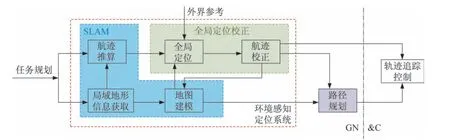
图3 巡视器无人驾驶系统功能结构图Fig.3 Function structure diagram of patrol unmanned system
总体来说,为实现一个无人系统的自主驾驶功能,需要对实时定位及地图建模(Simultaneous Lo⁃calization and Mapping,SLAM)、全局定位、路径规划和轨迹追踪控制各子系统进行算法设计,统称为导航控制技术(Guidance,Navigation,and Control Techniques,GN&C)。其中,轨迹追踪控制方案与巡视器运动机构设计方式高度相关,具有极大的系统特异性且技术相对成熟[10]。
实时定位及地图建模模块在不依赖于外界标定参考物的情况下,使用巡视器自身的传感器系统,通过运动过程前后时刻的感知差异推测相对运动关系,从而实现对航迹和地图的构建,提供实时的巡视器定位信息。
全局定位校正间断性地引入绝对空间中的外界参考,与实时构建的地图信息进行配准对标,消除长距离的工作中不可避免的定位漂移,校正航迹误差,实现对巡视器在绝对空间的定位。
路径规划技术则根据环境感知及定位信息,在综合考虑路径的可通过性、避障要求以及路径长度要求下,制定相关策略计算巡视器的前进路线,保障其行驶安全。由于外星球地形地貌复杂且不可预知,巡视器的路径规划算法需要对复杂地形具有自适应性,并能够满足相对于巡视器的行驶速度来讲的实时计算要求。
值得说明的是,并非所有成熟的地面传感定位技术都能用于星球巡视器自主导航[9]。举例来说,多数星球不具有地球一样特殊的大气环境,磁场强度也不稳定,因此,基于空气介质的测量技术(如超声波传感器等)和利用磁场的测量仪器均无法应用于月球等星球环境;此外,在外星球上无法在预先安装基站时对基站精确定位和定向,所以基于定向测距原理(如激光测距等)的定位方法实用性较差;由于距离遥远,地球GPS 定位系统也无法为星球探测车提供导航服务。迄今为止,在文献中记载可用于星球巡视器的车载传感器种类及功能分类如图4 所示[17-20],通过使用不同的传感器组合可以进行位置及姿态的估测,实现实时航迹推算及地图建模的功能。
2 国内外巡视器导航技术工程应用现状
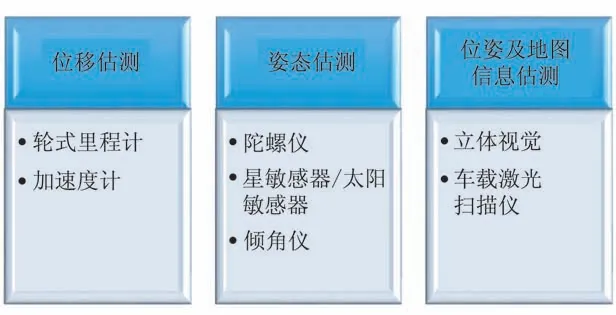
图4 星球巡视器定位及地图建模传感器Fig.4 Planetary patrol positioning and map modeling sensors
在星球巡视器技术研发应用中,美国无疑处在遥遥领先的位置。从1971 年到2012 年,美国已经向火星成功发射多台着陆器和4 台巡视器,其着陆点分布如图5 所示,4 台巡视器的外观对比如图6 所示。
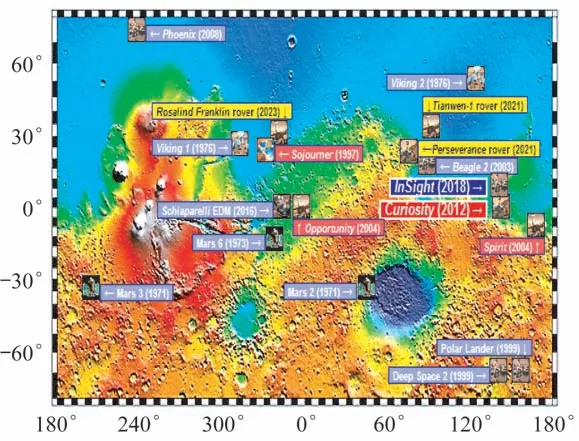
图5 美国火星着陆器及巡视器全球位置示意图[21]Fig.5 Schematic diagram of the global location of the US Mars lander and patrol[21]
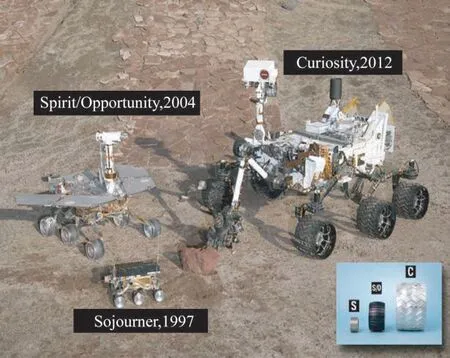
图6 美国发射的火星巡视器Fig.6 Mars patrol launched by the United States
1997 年着陆的旅行者号(Sojourner)作为第一辆成功在火星行走的巡视器,活动在着陆器的10 m×10 m 的范围内。旅行者号依赖于探路者号着陆器和地面指挥中心进行星际导航。利用其搭载的导航相机及着陆器相机,指挥中心人工计算出一条能够避障避险的安全轨迹,每次规划1~2 m 的前进距离回传给旅行者号。旅行者号则根据规划轨迹进行运动,到达局域目标点后停止行动并使用轮式里程计和陀螺仪进行航迹推算及自定位[22]。其航迹测算误差约为行进距离的10%。
相对于行动效率低下、自主能力差的旅行者号,2004 年着陆的勇气号和机遇号在自主导航技术上有了划时代的进步。它们利用惯性单元和轮式里程计估算位姿,同时加入太阳定位技术提高姿态估计准确度。更为重要的是引入了多对立体视觉里程计,通过前后帧图像中的特征点(石块顶端)检测与其分布模式匹配,利用光束平差法(Visual Odometry⁃Bundle Adjustment,VO-BA)计算两个邻摄像点的位姿关系,大大减少了崎岖路段轮式里程计由于滑移产生的定位误差[23](如图7 所示,横坐标为行进距离,纵坐标为定位误差,橙色部分表示光束平差法所引进的误差,紫色部分表示非光束平差法所引进的误差)。同时立体视觉能够自动检测定位危险区域特征,生成三维地形图,通过石块或者台阶的高度及密度、地形的倾斜度及平整度标记可通过区与危险区,在所有可行弧线路径中选择最短最安全的路径进行自主避障(如图8 所示,绿色部分表示可通过区,红色部分表示危险区)[24]。在勇气号和机遇号的行动过程中,全自主导航已经被应用于部分路段(如图9 所示,绿色线段表示全自动导航的路段),这表明其定位精度和避障可靠性大大增强,使得它们在火星上的行走里程达到了约8 km 与20 km,并能在地形复杂崎岖的山区环境行动(如图9 所示,机遇号在Sol 304 进行的24°爬坡运动)。然而由于参数设定不合理或阴影处理不当,机遇号在Sol 137、141 和235 分别出现了几次定位错误[25],且在图像特征不丰富地区,仍然需要大量依赖人工导航。
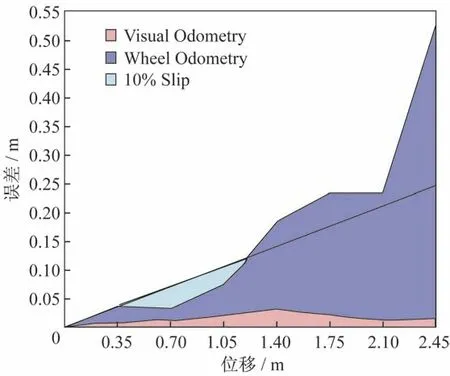
图7 勇气号和机遇号视觉里程计与轮式里程计精度对比[25]Fig.7 Accuracy comparison between the visual odometer and the wheel odometer for the Courage and Opportunity[25]
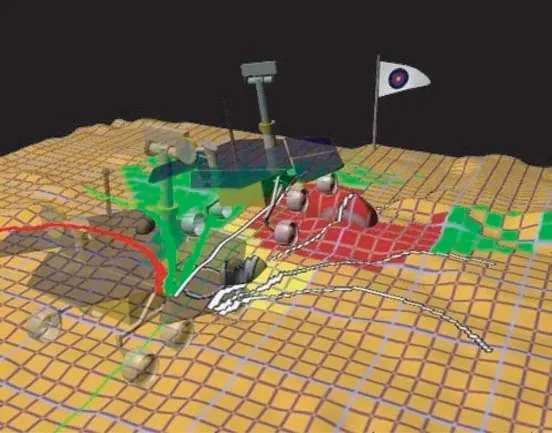
图8 勇气号和机遇号自主避障策略与路径规划示意图[24]Fig.8 Schematic diagram of autonomous obstacle avoidance strategy and path planning for the Courage and Opportunity[24]
2012 年着陆的好奇者号采用了核动力技术,其自动导航系统原理基本与勇气号与机遇号一致,利用了立体导航相机与立体避障相机的组合进行自定位与避障,达到了相对快的行驶速度(人工导航模式下140 m/h、自主避障模式下45 m/h、全自主导航模式下20 m/h),但仍不能全程脱离人工导航进行自主行动[26]。为了更好地用于地形三维建模及导航,好奇号装载了彩色全景摄像机以获得图像等信息,喷气推进实验室(JPL)地面中心的科学家可以通过这些信息发掘科学探测目标,完成好奇号的火星探索任务。美国“火星2020”计划中,NASA 设计的新一代火星车,在好奇号的硬件基础上,加装了测地雷达、X 射线光谱仪、紫外线激光器等传感器,新一代火星车的视觉系统载有多达23 个相机,在全自主导航模式下,预计行驶速度可达42 m/h,40 d 即可赶超机遇号14 a 的行驶记录。由此看来,利用多类传感器信息融合,实现星球巡视器的环境感知和自主导航,从而提高系统可靠性是巡视器自主作业能力提升的关键和发展方向。
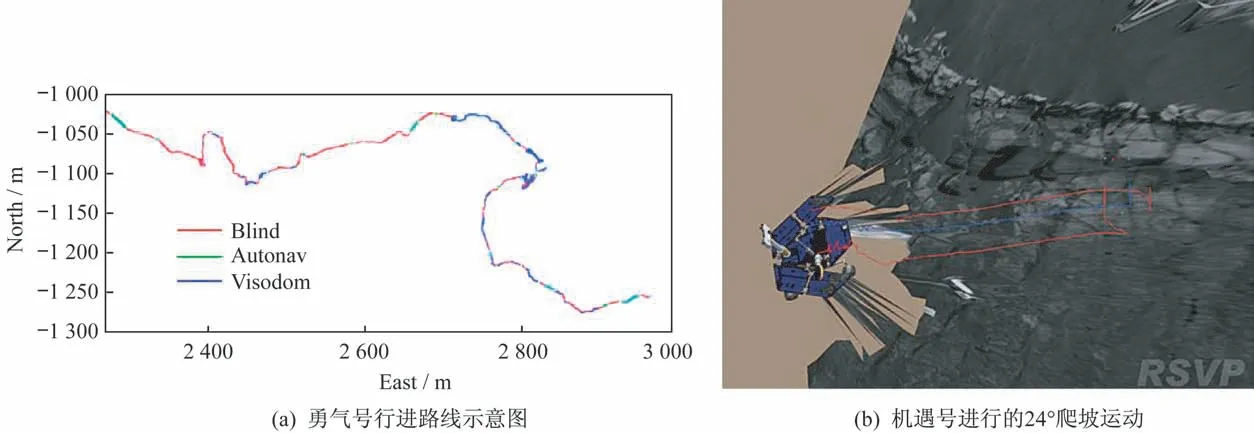
图9 勇气号和机遇号全自主导航示意图[25]Fig.9 Schematic diagram of fully autonomous navigation for the Courage and Opportunity[25]
2013 年着陆的中国玉兔号月球巡视器采用了地面遥操作的方式进行导航定位、月面地形重构和行驶路径规划。玉兔号配备的相机可供地面指挥中心进行视觉定位并进行月面三维地形建模,并基于此信息进行人工轨迹规划,完成导航避障策略。其总行进距离小于20 m[1],导航定位技术水平基本与旅行者号一致。2019 年着陆的嫦娥四号所携带的巡视器在其自主巡视技术和能力上与一代玉兔相似,采用的仍是短距及人工参与的巡航技术。
近10 年实现星球巡视车在外星环境成功工程应用的国家只有美国和中国。在实时定位及地图建模方面,美国研发了基于立体视觉的航迹推算和地图信息获取技术,在路径规划方面实现了基于地形信息的避障避险算法,两者综合的全自主导航技术在部分火星区域成功应用。但因缺少全局定位算法只能小范围使用且不能完成采样取回任务,而已有算法也存在着可靠性不足、受环境参数影响大、效率低的问题,因此,只能部分地替代人工导航技术,自主性和地形适应性不足成为制约巡视器的行走速度与探测距离的瓶颈。而中国的自主导航技术与美国还存在着十几年的差距,其应用现状不能满足国家提出的深空探测战略发展需求。
3 国内外巡视器导航技术研究现状
针对应用现状的不足,各国研究者们在近年来将新技术新算法引入星球巡视器自主导航技术的研发。在下面的内容中,将按照图3 中的技术构架对近年星球巡视器自主导航技术研究作逐一梳理。
3.1 实时定位与地图建模
实时定位与地图建模技术要求系统根据多种车载传感器(如图4 所示)的测量对巡视器的位姿进行测算并实时更新地图信息。这一方向在实际星球巡视中的技术应用最为成熟。国内外相对于实际工程技术有特异性的研究成果代表,按照传感器技术使用发展脉络的总结见表1。
轮式里程计精度受运动滑移影响较大,以及惯性单元存在大的零点漂移误差不能单独用于长时定位,因此,需要配合其他测量手段进行可靠定位。代表性的方法如文献[20]中给出的将惯导与星敏深度融合算法,将误差测量漂移控制在20 m 以内。
视觉里程计已经被证明能够提供更加准确的相对位姿估算,同时也能提供稀疏的地图信息[17]。但相对来说其匹配算法存在鲁棒性不强的难题[27-28]。文献[29-30]分别从特征点权值调整和利用结构特征对象出发减小远像点误差及摄角误差,但还未见能够减小多变光源和环境对视觉传感精度影响的通用技术。
激光三维扫描特点是可以快速获取大量高精度地形测量点,被引入到巡视器的地图建模及匹配融合中。文献[18]提出了加入曲率和法向量构成的7 维迭代临近点(Iterative Closest Point,ICP)匹配算法,能够解决部分重合数据匹配问题。文献[19]利用尖点特征检测加特征稀疏及稠密DARC⁃ES 法[31](Data Aligned Rigidity-Constrained Exhaus⁃tive Search)双重匹配的方法,得到很高的里程计和地图精度(见表1),但其结果都依赖于特定地形特征且计算量大。

表1 巡视器SLAM 算法相关代表文献Tab.1 Patrol SLAM algorithm related representative literatures
总的来说,经过大量实验验证,国外的SLAM技术相关研究趋势为应用多传感器融合技术提高定位和地图建模的精度和可靠性,其技术相对成熟,但因各类传感器在不同工作条件下精度差异较大,算法通常对适用的环境有要求,还未能解决在多种非结构化复杂环境下的多传感精确融合问题。而国内的研究仍大量局限于视觉领域,且更多局限于定位技术的讨论,还不能证明其在长程连续运动过程中能够形成准确的航迹及地图信息。然而,大量的视觉里程计相关研究表明其在未来的局部定位系统中将发挥越来越重要的作用。文献[45]表明,在美国的下一代ExoMars 火星车系统中,视觉里程计导航将取代轮式里程计成为主要定位技术手段。
3.2 全局定位
全局定位需要依靠外界参照物信息与巡视器本体测量进行匹配,从而在全局坐标系定位当前位置,校正航迹。
由于巡视器全局定位能够控制长距离航迹推算漂移误差,作为返回式作业的使能技术在近年来得到了学界的关注。巡视器全局定位算法相关代表文献见表2。
文献[32]提出的天际线匹配方法VIPER(Virtual Intelligent Planetary Exploration Rover)是早期在实验中得到验证的星球车全局定位方案。其原理为将视觉图像的天际线特征与在全局地形DEM(Digital Elevation Map)提取的天际线形状进行贝叶斯最大似然估计匹配,确定全局地图与巡视器相对位姿关系。虽然其使用的原始数据分辨率较差,导致原文中定位误差相对较大,但因其经过大量地面实验验证,在许多后继文献中被用来作为对标标准。
另外,一种经过大量实验验证的方法则是利用LiDAR(Light Detection and Ranging)扫描生成局域地图地形特征,并利用地形特征进行匹配,相关工作见文献[10,16]。不同的是,文献[10]的匹配特征为自动检测的地形尖点,而文献[16]的特征为手动选取,两者都经过了大量的户外移动平台动态实验,并取得了可以相比拟的全局定位精度。两者都与VIPER 方法进行了对比,得出了相同的结论,即在不同的地形条件下基于LiDAR 地形和天际线匹配的方法各有优势。然而,由于局域地形探测的视觉和激光传感器在遇到近距离障碍物时会出现严重遮挡,故而在某些遮挡严重的地形,如峡谷地形工作时匹配效果不佳。同时,如果地形缺乏相应特征,也会影响匹配的鲁棒性和准确度。
在全局匹配方面还有一些值得关注的前瞻性和研究性工作。如文献[33]利用了视觉特征点,通过粒子滤波优化算法与LiDAR 地图进行稠密点匹配,达到了像素级匹配精度。文献[13,34]利用立体视觉与HiRISE(High Resolution Imaging Science Experiment)系统地图进行物理特征或图像特征匹配,在现有的火星数据库数据进行验证时得到了亚相素级的精度。文献[48]利用立体视觉与HiRISE系统地图进行基于灰度、纹理等多特征向量的兴趣区提取,并利用DARCES 穷举搜索算法进行兴趣区星座分布的模式匹配进行定位,其在类火星地面实验图像上取得了3 km 距离最大定位误差小于50 m的定位精度。文献[35]利用两组立体视觉进行最高值点匹配,在试验场地静态图形测量定位精度达到2 m。这些文献提出的方法因还未在移动平台及多类地形上进行动态过程实验验证,其可靠性、准确性和对抗环境干扰的鲁棒性还有待进一步检验。

表2 巡视器全局定位算法相关代表文献Tab.2 Patrol global positioning algorithm related representative literatures
3.3 路径规划
路径规划的主要任务是根据任务规划,依赖当前定位及地图信息对巡视器在地形上行驶的安全性进行评估,并通过优化方法得到满足避障、防倾倒、路径短的能够到达目标位置的安全行驶路线。因此,路径规划技术的核心要素有两个:一为如何设计行驶安全性的评估函数从而得到可通过性评价地图;二为如何根据可通过性评估结果进行路径规划和优化。
在可通过性研究方面,因为星球表面为环境复杂的非结构化地形,用于传统室内避障的二维地图不足以支持可通过性分析要求,因此常使用规则或不规则网格的高程地形图。在早期的研究中,对可通过性的评价基本基于对地形本身危险要素在待选路径上的分布评价[37-38],而后期逐渐引入了车体与地形交互的姿态分析[14,12,40],从而使 行驶安全性的评估更加准确,然而由于其栅格密度大,计算效率低。为此,文献[39]提出用规则网格构建可通过性数据图,用地形云点数据计算车位姿数据从而量化可通过性的方法。其优势在于兼顾了规则栅格数据处理量小而云点数据信息量大的特点。可惜的是此种可通过性分析方法未能用于路径规划,因而没有实验验证其实用性及可行性。
在路径规划算法方面,用做巡视器路径规划的数学方法与一般的路径规划几乎相同,可通过性作为一项权值加入路径优化计算中,从而得到行驶安全性与路径效率兼顾的优化结果。如表3 所示,文献[37-38]通过用于火星车的Morphin 算法(也称作GESTALT 系统[41])在备选曲线中做出选择,路径规划常见的各类图形搜索算法[12,14,37,42-43]也被用于巡视器路径规划中。
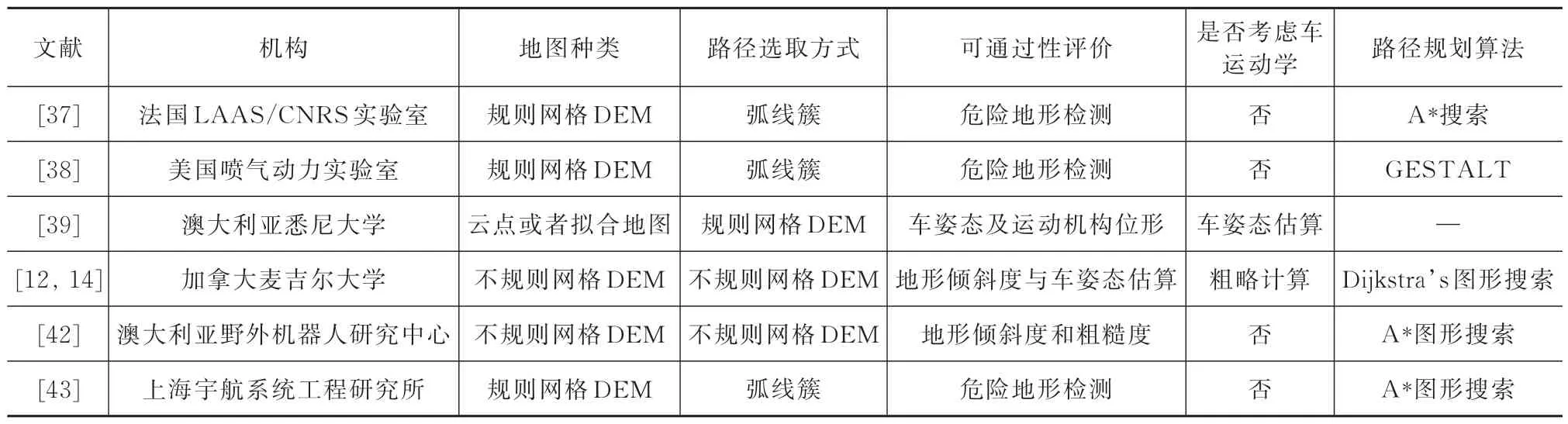
表3 巡视器路径规划算法相关代表文献Tab.3 Patrol path planning algorithm related representative literatures
4 结束语
由以上国内外研究现状分析可知,巡视器的自主导航系统应用水平远远跟不上深空探测工程发展的需求[47]。同时虽然各国学者在巡视器自主导航系统关键技术的各方面都进行了长期的研究,但总的来说还不够全面和成熟[44],我国的相关研究尤为落后。总结来说,对以下几个方面关键技术进行研究突破的需求十分迫切:
1)具有环境和工况自适应性的多传感器融合定位。多种传感器的联合使用能够使定位的准确度得以提高,然而现有的算法对融合定位策略应用的环境条件依赖性强,不能在多种工作情况下保证融合定位精度。研发一种能够适应各种典型外星地形环境的传感器融合策略,能够使巡视器在变化的工况下进行准确自定位,从而保障其在多种复杂环境的自主安全作业。
2)基于非完备局域地图的可适应多地形环境的全局定位。由于巡视器的局域地图不可避免的非完备性和典型地貌特征差异性,基于全局地图进行特征匹配的全局定位算法在各地形条件下的性能差异巨大,从而有可能带来大的全局定位偏差。因此,对现有的特征匹配算法进行改进,从而使其能够在信息部分缺失情况下适应各种典型外星地形环境,是保障其远距离作业及采样取回任务成功的关键。
3)实时安全的路径规划算法。路径规划的安全性评估包含了避障可靠性及行驶稳定性,因此,必须考虑车体与多变地形的交互位姿关系并量化其可通过性。然而,现有的考虑交互关系的评价方法计算复杂且不能满足路径规划的实时性要求,因此,需要加以改进以解决路径规划计算实时性与可靠性之间的矛盾。
针对现有星球巡视器面临的诸多挑战,开展巡视器多传感器融合定位、可适应多地形环境的全局定位、实时安全的路径规划算法等领域的创新研究,提升巡视器的智能化、自主化程度,可为我国未来的星球巡视器深空探测提供有价值的参考方案和开放的学术思路。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国医院院长(2022年13期)2022-08-15
国际太空(2021年8期)2021-11-05
伙伴(2019年12期)2019-01-17
环球时报(2019-01-12)2019-01-12
金桥(2018年4期)2018-09-26
漫画月刊·哈版(2017年8期)2018-01-29
漫画月刊·哈版(2016年5期)2016-07-11
中学科技(2015年7期)2015-07-03
文学少年(小学版)(2014年1期)2014-12-01
