直线永磁电机的自适应容错控制
2021-03-03 09:43张涛涛张双燕李萌武力兵
辽宁科技大学学报 2021年5期
张涛涛,张双燕,李萌,武力兵
(辽宁科技大学 理学院,辽宁 鞍山 114051)
随着现代工业自动化的快速发展,具有结构简单、控制性能优越、功率密度高等众多优点的电机控制系统应用越来越广泛[1-2]。在城市轨道交通系统中,直线永磁电机不需要转换装置,就能把电能转变成直线运动机械能[3],逐步取代传统的旋转电机。特别是直线游标永磁(Linear permanent magnet vernier,LPMV)电机,效率高成本低,应用前景非常广阔。但LPMV电机系统具有强耦合特征,在长期运行过程中不可避免地会发生故障,如执行器、传感器和系统内部元件等故障[4-6]。并且LVPM电机在动力传动过程中会受到参数不确定性和外部扰动等因素的影响。传统的鲁棒控制方法不能有效地处理此类故障系统。
1991年,Kanellakopoulos等[7]针对非线性系统提出反步法(Back stepping)控制策略。作为一种倒推式设计方法,反步法将高阶系统分解为多个子系统,对每个子系统设计一个虚拟控制律,借助于Lyapunov函数连接起来,最后通过稳定性分析保证各子系统的收敛性,进而实现整个非线性系统的稳定。这种方法可以有效解决带有参数不确定性和外部扰动非线性系统的鲁棒控制问题。周丽等[8]针对一类不确定严格反馈非线性系统,结合滑模控制和反步法控制策略,使跟踪误差在有限时间内渐近趋于很小的邻域内。于金鹏等[9]采用模糊逼近(Fuzzy approximation)技术,将自适应反步法应用于永磁同步电机(Permanent magnet synchronous motor,PMSM)中,设计出具有高性能的鲁棒控制器。唐红雨等[10]结合滑模技术设计自适应控制器并应用到LPMV电机中。基于自适应迭代学习技术,陈升等[11]针对一类下三角非线性系统给出自适应容错模糊控制方法。针对带有执行器故障和参数不确定性的线性系统,Li等[12]设计鲁棒自适应容错控制器,并进行稳定性分析。牛瑞燕等[13]将自适应容错控制技术应用于带有执行器故障的双关节刚性机械手非线性模型中。蒋阳等[14]研究新型抗低频扰动反电势观测器,对直线游标永磁电机进行无位置控制。针对永磁直线同步电机系统,许德智等[15]研究基于神经网络自适应技术的超扭曲终端滑模控制策略。本文针对带有执行器故障的LPMV电机非线性系统,采用反步法设计自适应容错控制器,保证所有闭环输出信号是有界的,同时也保证系统输出能够渐近跟踪到预先给定的参考信号。
1 直线游标永磁电机数学模型
采用组合永磁体阵列的初级LVPM电机结构如图1所示。初级和次级分别对应电机的动子和定子。电机永磁体在电机的转子上,定子为凸结构。定子移动一个转子极距时,动子绕组的磁链会产生一次周期性的变化。

图1 直线游标永磁电机结构Fig.1 Configuration of linear vernier permanent magnet motor
利用反步法与自适应容错理论设计LPMV电机控制器,分为两步:第一步设计虚拟控制α1,使第一个闭环子系统达到稳定状态;第二步设计自适应故障补偿控制u,抵消掉外部扰动和执行器故障对系统的影响,并实现渐近跟踪的控制目标。
参照旋转坐标系,把初级及次级坐标系分别视为定子坐标系和动子坐标系。LVPM电机的电压方程
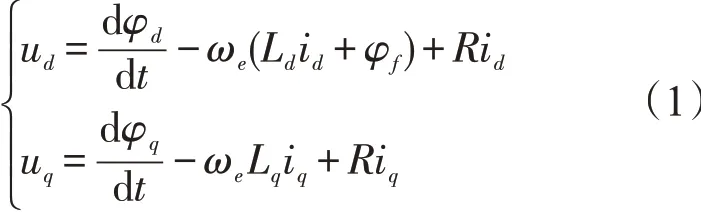
式中:q为交轴,d为直轴;id和iq为d,q轴电流;ωe为动子电气角速度;φf为永磁体磁链;R为每相绕组电阻;ud和uq为d,q轴电压;Lq为交轴励磁电感;Ld为直轴励磁电感;且φd=Ldid+φf,
忽略电阻,LVPM电机的推力方程

式中:第一项为永磁磁链与q轴电流产生的力;第二项为d轴跟q轴电感不相等引起的推力,如果采用隐极机形式或者i=0控制策略,则此项不存在;第三项是由d轴和q轴之间的互感产生的推力,通常情况下,互感都比较小,此项可以忽略不计。
角速度ωe=pπv/t,并且采用id=0控制策略,则推力方程简化为

LVPM电机动力方程为

式中:p为极对数;τ为极距;v为动子线速度;ωe为动子机械角速度;F1为直线电机的负载阻力和电机本身的定位力之和;Bv为粘滞摩擦系数;M为动子总质量。
设v为实际速度,s为动子位移;令,以及u=iq。根据式(3)与式(4)将LVPM电机的数学模型转化为状态空间表达式
由于系统建模过程中存在参数不确定性,且在长时间运行过程中不可避免地发生执行器故障,因此采用如下容错控制系统

式中:执行器失效因子ρ∈(0,1];d是系统外部扰动;θ=[θ1,θ2,…,θr]T∈Rr为未知的参数不确定向量;g(x1,x2)=[g1(x1,x2),g2(x1,x2),…,gr(x1,x2)]T∈Rr为相应的向量函数。
对于系统(6),采用自适应反步容错方法,使非线性系统的所有闭环控制信号是有界的,并且系统输出x1在执行器发生故障时依旧能渐近地跟踪到给定的参考信号xr。
假设1 外部扰动d是有界的,即|d|≤d*;
假设2 参考信号xr及其一阶和二阶导数和都是有界的;
假设3 控制增益b≠0,且其符号是已知的。
2 自适应容错控制器设计
容错控制系统(6)为二阶系统,采取反步法倒推出要求的容错控制器。

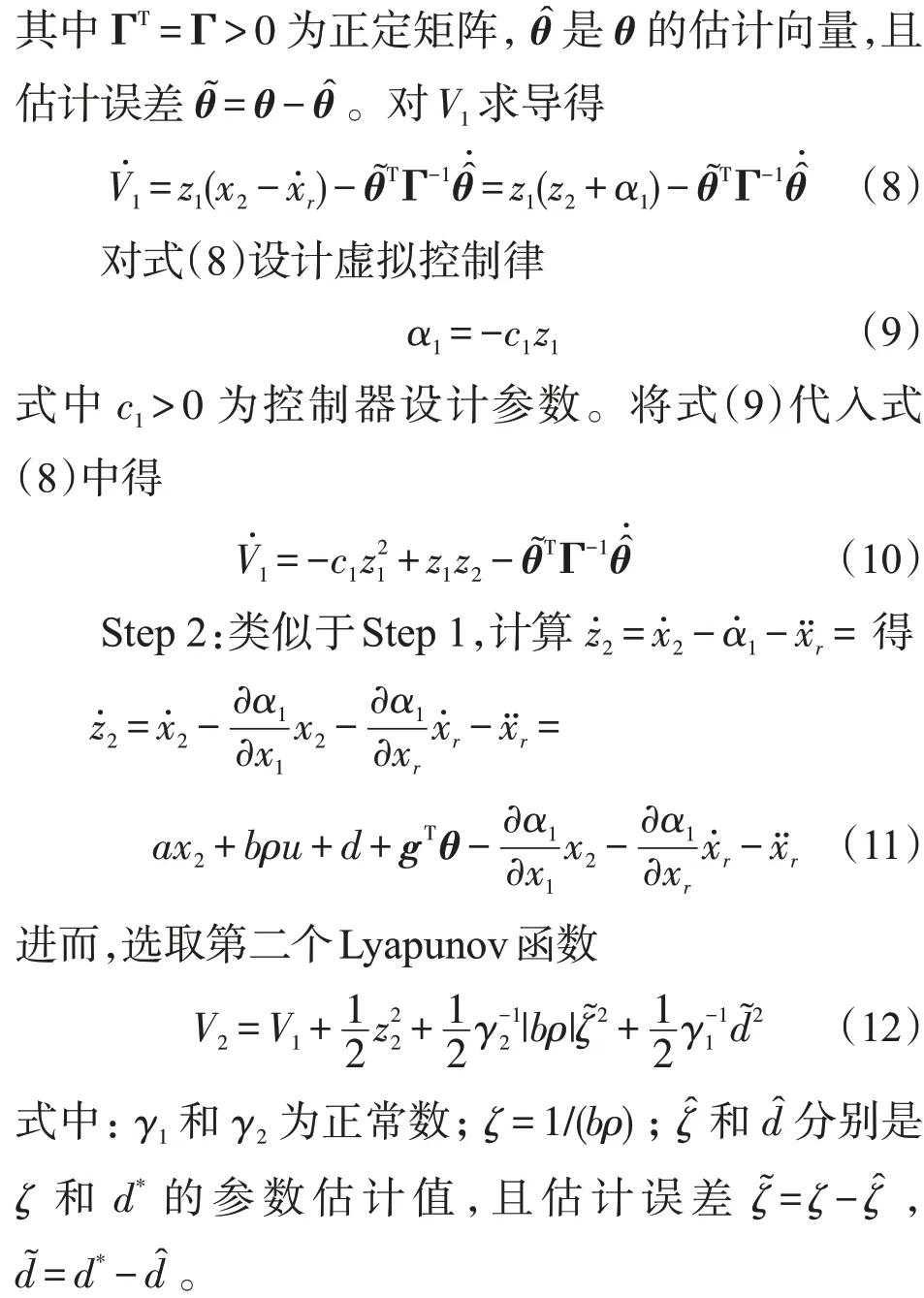
对V2求导得

选择自适应容错控制器以及相应的参数更新律


选择参数更新律

定理1对于带有执行器故障和参数不确定性的LPMV非线性系统(6),在假设1~3的条件下,自适应容错控制器(9)、(14)和(15)连同参数更新律(17)~(19)能保证所有闭环信号一致有界,并且输出信号渐近地跟踪到期望的参考信号。

3 仿真实验
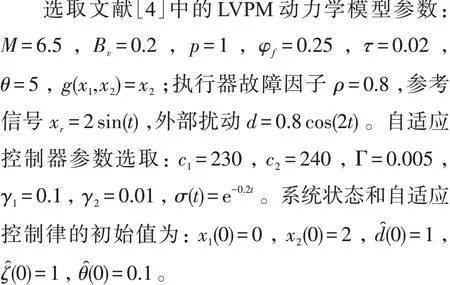
为了验证LVPM电机反步自适应容错控制策略的有效性,采用MATLAB程序设计仿真计算。
位移x1与跟踪信号xr的时间响应曲线如图2所示。位移x1的轨迹从(0,0)点开始做周期性正弦运动,振幅有界区间为[-2,2],说明位移在运行过程中是稳定的。跟踪信号xr的位移轨迹与系统输出位移x1几乎完全重合,说明自适应渐近跟踪控制精确有效。
LVPM电机系统动子线速度x2的轨迹如图3所示。线速度x2从(0,2)开始做周期性余弦运动,振幅有界区间为[-2,2]。说明动子线速度x2在运行过程中是稳定的,电机控制系统是有效的。

图2 位移x1与跟踪信号xr的时间响应Fig.2 Time response of displacement x1 and tracking signal xr
图3 动子线速度x2的轨迹Fig.3 Trajectory of linear velocity x2 of mover
外部扰动d^的运动曲线如图4所示。在电机刚开始运行时,外部扰动d^为最大值1,随后迅速下降,在电机运行10 s后达到稳定状态,在区间(0.6,0.65)之间细微起伏,仿真曲线后期有界,说明控制系统自适应补偿有效。

图4 扰动d^的轨迹Fig.4 Trajectory of disturbance d^
故障补偿参数轨迹如图5所示。在电机刚开始运行时,为最大值1,与扰动在此时的最大值1相对应;随后迅速下降,与扰动的下降对应,说明电机控制系统故障补偿的及时性和准确性。随后开始做振幅逐渐变小的周期性运动,振幅区间为(0.9986,1),说明扰动的变化是周期性的;在故障补偿律的作用下,扰动趋于稳定,故障补偿参数也逐渐变小趋于稳定。仿真曲线后期有界,说明控制系统自适应补偿机制有效。

图5 故障补偿参数ζ^的轨迹Fig.5 Trajectory of fault compensation parameterζ^
自适应参数θ^的轨迹如图6所示。θ^恒正,轨迹从(0,0.1)开始做周期性正弦运动,振幅有界区间为[0.09,0.11],说明自适应参数θ^是稳定的。在运行过程中,θ^与位移x1和跟踪信号xr同步,说明电机控制系统能精确有效地进行在线自适应容错控制。

图6 自适应参数θ^的轨迹Fig.6 Trajectory of adaptive parameterθ^
控制输出u的轨迹如图7所示。u从(0,0)开始做周期性简谐运动,振幅为(-4,2),电机控制系统的控制输出稳定,说明LVPM电机非线性系统的自适应容错控制模型有效。
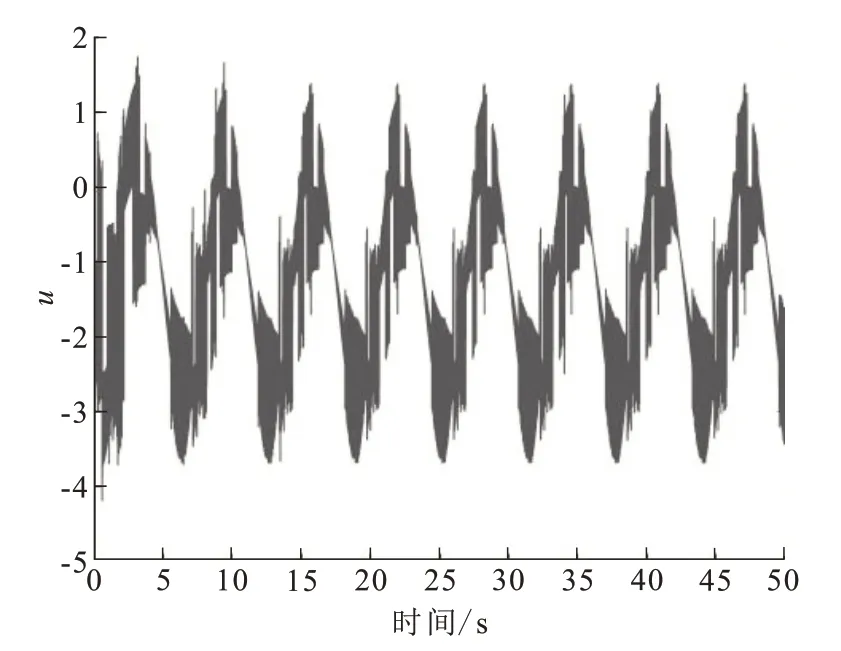
图7 控制输出u的轨迹Fig.7 Trajectory of control output u
4 结论
本文综合考虑参数不确定性、外部扰动和执行器故障对直线游标永磁电机非线性系统的影响,运用反步法设计自适应控制器和相应的故障补偿律,并进行Lyapunov稳定性分析和仿真实验,取得良好的渐近跟踪效果,从而验证容错控制方法的有效性和优越性。未来将进一步研究带有状态约束的LVPM电机系统的事件触发控制问题。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
微特电机(2020年7期)2020-07-28
微特电机(2020年3期)2020-03-24
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28