自适应粒子群算法的高压直流输电控制器设计
2021-02-28 07:28:08中国南方电网超高压输电公司天生桥局
电子世界 2021年23期
中国南方电网超高压输电公司天生桥局 张 杰
在高压直流输电过程中,控制器在此过程中发挥的作用是至关重要的,相比常规的控制结构,输电控制器结构简单、鲁棒性能较优,具有较强的实用性与操作性。目前,80.0%以上的闭环电力系统,均在运行中,以输电控制器作为支撑,进行其运行的调控。因此,可以认为控制器的综合性能、结构参数等,可以直接影响到前端输电控制效果。例如,结构优化、性能完善的控制器可以提升输电响应速度,确保高压直流输电转换的稳定性;结构不合理、功能缺失的控制器则会造成输电响应异常或传输的电流不稳定。目前,相关技术研究领域大多使用经验法进行控制器参数的调整与设计,尽管此种设计方式可以满足对终端输电的响应与控制,但控制的效果却不一定可以达到预计效果或理想效果。因此,有必要在早期相关研究的基础上,对控制器进行优化设计,使用一种较为科学的方法进行参数的设置。为了满足提出的设计需求,在本文的研究中,引进了自适应粒子群算法,此算法在应用中又被称之为APSO算法,在设计过程中,利用前端MatLab软件作为支撑,通过对动物群体觅食过程模拟与仿生,进行全局的随机检索,可以将此算法的检索过程近似看成智能群集的过程。基于此过程的应用,对高压直流输电控制器展开设计研究,从而为前端输电提供更加稳定的支撑设备。
1 基于自适应粒子群算法的高压直流输电控制器设计
1.1 选择高压直流输电控制器控制方式
为了实现对前端输电的有效调控,在进行控制器设计时,应先进行控制器控制方式的选择。在此过程中,可参照VSC-HVDC输电模型,调整控制器输电线路,明确VSC之所以可以实现对交流与直流的独立控制,主要是其可以有效地识别前端输电的有功状态或无功状态,其中VSC输电的等效电路如图1所示。
图1 中:P表示为直流侧输入的有功运行功率;U表示为直流侧电压;R表示为等效电阻;I表示为输入端电流;L表示为阻抗电感;C表示为交流电路。在上述提出的输电线路中,换电站整体结构排布较为紧密,可满足本文控制器的设计需求。因此,可参照此电路结构,进行本文控制器电路的集中设计,为了在此基础上实现对后端控制方式的优化,可在图1中增设K个控制点,设定每个控制点的整定值,即在控制时,根据输入点电能的具体值,对整流侧的功率进行信号推导,得到一个内环向外环输出的功率值,实现基于控制点宏观调控的控制器控制方式选择。
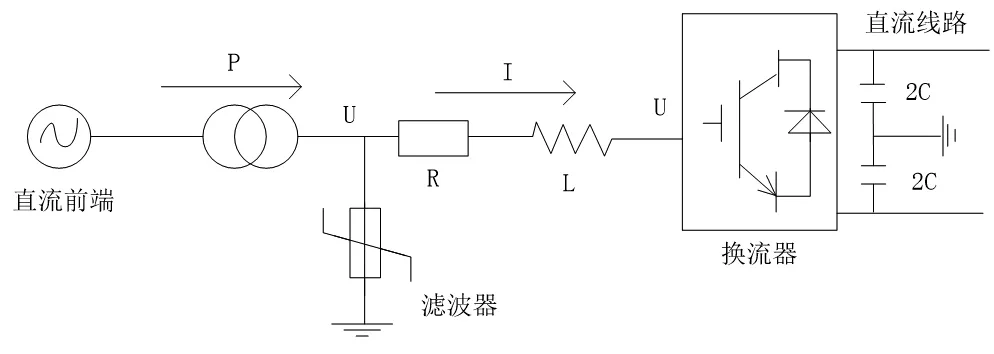
图1 VSC等效输电线路示意图
1.2 建立内环电流控制器小信号模型
在完成上述对前端控制方式的选择后,建立一个针对控制器内环电流有效控制的小信号模型,在此模型中,通过对输电基波分量的计算,掌握前端有功耦合与无功耦合之间的差值,并以控制点的电压U作为建模节点,构建一个符合基准参数的输电稳态旋转坐标系。
将控制器发出的信号分为有功信号与无功信号两种类型,根据信号的整定值,进行外环等效函数的推导,以d-p轴作为小信号模型建模的依据,进行电信号的整合。其中d与q表示为信号在两个不同方向下的分量。根据直流电的传输理论可知,当前端控制器在扰动状态下与非扰动状态下的整流电压为0时,在d-p轴中,瞬时无功功率符合线性化电路理论,此时,由内环输入的交流电在控制器中进行的作业行为属于无功功率。因此,可以认为此时的有功小功率信号完全集中在等效开环中,可直接按照控制器在此区段的有功做功,对内环传递电流的方向进行等效替换,即可得到一个针对控制器的小信号模型。
1.3 基于自适应粒子群算法控制器参数优化
在掌握控制器在运行中的基本原理与控制方向后,本章引进自适应粒子群算法,对控制器参数的优化展开设计。
在此过程中,选择对应带电粒子对其进行种群初始化处理,初始化处理的参数包括控制迭代行为发生的实际次数、最大与最小迭代次数、粒子占比权重、控制加速常数、电离子个体极值、全局控制量与控制点的初始化值、控制点的有效控制范围等。在掌握待优化的具体参数值后,可假设每一个参数表示为一个粒子,将其表示为Pi,对Pi的处理步骤如下:假设控制器的控制空间维度为d,在d中存在m个随机有效控制粒子,每个粒子的飞行方式与经过的位置均是无法预测的,此时每个粒子的适应值范围可以被描述为优化的最佳范围,以粒子的飞行速度作为控制依据,可以通过更新粒子在空间内的飞行有效范围,进行Pi的优化,优化的项目为位置与参数。在完成与此方面相关的设计后,根据粒子的集中趋向性,对Pi的适应度与有效适应值进行计算,通过此步骤计算可以得到一个具体的适应值,将此数值表示为J,假定J的实际数值优于Pi,则可以认为此时的J值为Pi当前位置值,假定J的实际值无法作为Pi的有效适应值,或计算的结果值超过Pi的有效范围区域,则需要更新控制器周边离子的方式,进行Pi当前最优位置的全局检索。设定阈值条件,当识别终止条件时,输出当前状态下的Pi值,以此种方式,完成对控制器参数的优化,实现对控制器的优化设计。
2 对比实验
选择国际电网直流标准输电控制测试系统作为集成对象,将本文设计的控制器,按照标准安装在系统中。选择基于POS算法的控制器设计方法作为对照组方法,以相同的方式安装在测试系统中。
对接测试系统与前端PC设备,设备中的电压传感器与电流传感器将自动进行实验中相关数据的记录。在此基础上,按照优化后的参数,进行控制器的集中调控,并将参数值输入到MatLab操作软件中。系统左侧为电高压直流输入装置,即用于向需求端传输电流,对应的系统右侧为接收端,前端流入的高压直流电流较高,经过测试系统中的控制器集中调试与控制后,电流与电压将根据输出端需求,以一个较低的稳定值输出。
在掌握对比实验的原理后,将整流侧有功功率值作为评价控制器控制效果的指标,实施此次对比实验记录控制器在接收前端电流与电压后,对其的控制情况,并输出控制前与控制后的有功功率值,将结果绘制成折线图,如图2所示。
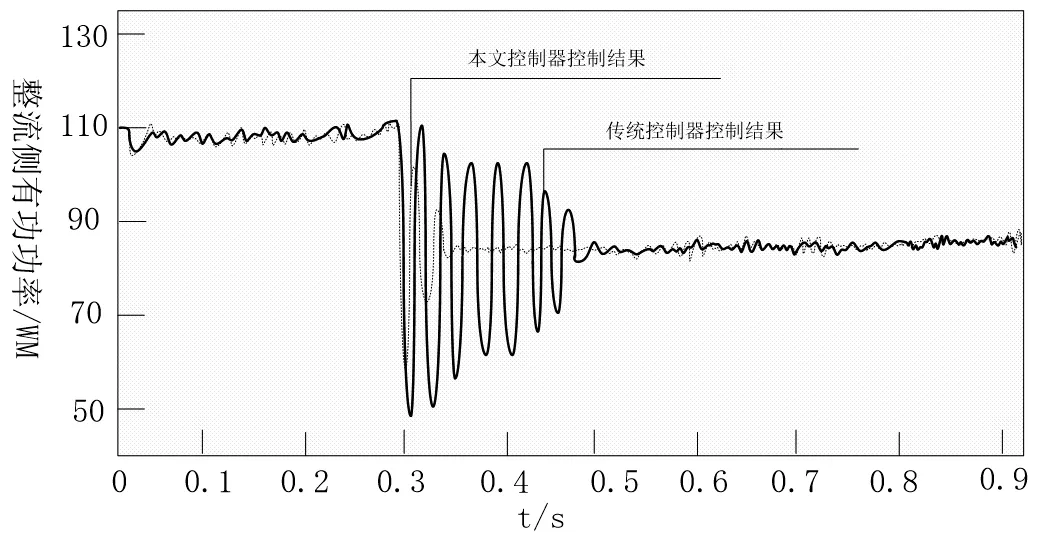
图2 整流侧有功功率控制效果
根据上述图2所示的结果可以看出,本文设计的控制器与传统控制器均在接入0.3s时发生控制行为,图2中虚线表示为本文控制器的控制效果,实线表示为传统控制器的控制效果。尽管两种控制器均在1.0s内,实现了对整流侧有功功率从110.0MW到85.0MW的控制,但显而易见的是,本文控制器的有效控制时长在0.3s~0.35s时间段内,传统控制器的有效控制时长在0.3s~0.5s时间段内,即本文控制器在一个较短的时间内,实现对前端输入电流与电压的调控,使整流侧有功功率的输出趋近于稳定。综合上述实验,得出实验结论:相比常规的控制器设计方法,本文提出的方法,在集成于测试系统后,实现对整流侧有功功率的控制时间更短,即控制效果更优。
结束语:本文基于自适应粒子群算法的应用,从控制方式、构建小信号模型、控制参数优化三个方面,对高压直流输电控制器展开了设计研究。实验结果表明:本文提出的方法对整流侧有功功率的控制时间更短,即控制效果更优。表明提出的算法可以实现对控制器参数的优化。
猜你喜欢
测控技术(2021年10期)2021-12-21 07:10:20
测控技术(2018年10期)2018-11-25 09:35:54
通信电源技术(2018年3期)2018-06-26 06:33:32
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
电源技术(2015年11期)2015-08-22 08:50:36
电测与仪表(2015年10期)2015-04-09 11:48:02
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15
电子设计工程(2014年17期)2014-02-27 11:59:52