
针对残疾人士的多功能拐杖设计
2021-02-28 07:27湛江科技学院
电子世界 2021年23期
湛江科技学院 王 冠
江门东洋油墨有限公司 黄振中
这是针对残疾人出行生活不便而设计的多功能拐杖,运用单片机作为控制系统、同时内置GPS定位、GSM通信。可以实现舒适防滑、高度调节、超声波测距报警、摔倒报警、语音等功能。大多残疾人的出行都得依赖各类辅助出行的工具,而拐杖更是其中使用率最高的工具之一。盲人或下肢无力等类型的残疾人出行都得依靠拐杖,但传统拐杖缺点明显,甚至无法很好保障残疾人的出行安全。而多功能拐杖则摆脱了传统拐杖结构简单,功能单一,怕湿怕潮等问题。如今合金材料和各类高分子材料的快速发展,更为多功能拐杖的结构设计,关键性能的提升提供了很大的帮助。本文的拐杖,把手部分使用的是ABS树脂材料,杖身部分使用铝合金,底座脚垫使用防滑橡胶。从而实现防滑、舒适、耐用等目标。
残疾人安全出行问题一直是我国社会发展的主要问题之一。虽然如今在社会各界的帮助下,残疾人的出行得到了很大的帮助,但同时,城市交通也变得越来越拥挤,盲道被侵占,被破坏的程度很严重,残疾人的出行安全无法得到保障。用于辅助残疾人出行的工具拐杖,在传统意义上功能单一,结构简单,对残疾人出行所提供的帮助很有限,无法满足更多的需求。所以有必要通过新技术融合,设计一款针对残疾人士的包含定位,导航,求救,障碍检测等功能的多功能拐杖,为残疾人士出行提供便利。
1 拐杖的总体设计
拐杖的结构总体如图1所示,一般分为杖头(把手),杖身和底座。考虑到残疾人士上肢力量不足的可能,拐杖的质量最好不超过1kg。但拐杖也不能太轻,不然不一定可靠。综合人体的身高,手臂的长度等因素,拐杖的一般长度在70cm到100cm之间。对应身高从140cm到190cm。因此,多功能拐杖的总体高度初步设计从70cm~75cm到90cm~95cm,其中分为十档伸缩调节,每一档间只相差2cm,多档调节更能方便使用者找到合适自己的档位,得到更好的使用体验。在拐杖的结构设计过程时,不仅要设计合适的结构,材料的选择也很重要。适合的材料能使拐杖本身承重够强,安全性能好,不易损坏,体验好。

图1 拐杖的总体设计图
2 系统总体设计
多功能拐杖的系统由单片机负责控制、GPS模块负责定位、GSM通信实现联系、障碍物超声波感应报警、摔倒自动检测和报警、语音功能等模块组成。单片机作为控制系统,能实现这一系列的功能。当行走过程中遇到障碍物时,拐杖能通过超声波检测自动识别,同时系统会发出警示。当使用者摔倒时,拐杖能自动报警,通知周围的路人,依靠GPS定位和GSM通信模块,系统能对拐杖使用者的联系人进行及时的通知并报告准确的位置。
控制系统工作原理如图2所示:当拐杖感应到倾斜度发生变化时;立刻发出报警求援信号,报警时间持续15s;当前方有障碍物时;感应器会有相应的震动反馈,从而产生报警信号;当使用者迷失方位时;只需按下自我定位按钮即可得到语音播报;如需救援按下救援按钮即可。
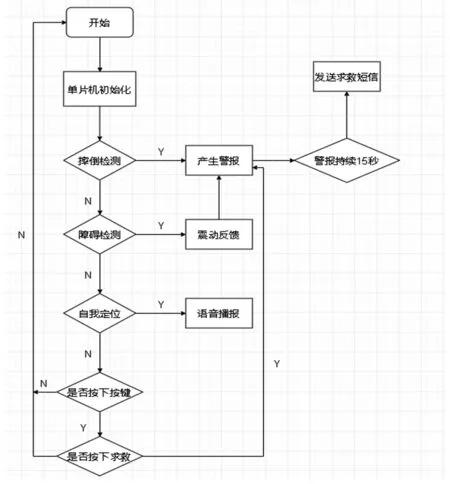
图2 系统程序框图
3 拐杖的重要零件设计
3.1 杖头的结构设计
传统拐杖把手一般呈T字形,多功能拐杖的杖头形状结构应与一般拐杖保持类似如图3所示,在与手接触的部分采用贴合人手的设计。为了保证舒适握感同时避免打滑,还应该在把手表面进行磨砂。而且多功能拐杖的性能与一般拐杖不同。为了防止误触,按钮应该设计在杖头与杖身连接处靠里的侧面。把手部分采用了贴合人手的造型,在侧面设计了紧急报警,总开关,以及其他的各类功能按钮,在旁边还配有充电插口。这里特意用了两种不同的颜色作为紧急报警和开关的按钮,其中红色是紧急报警按钮,绿色是多功能拐杖的开关。同时,紧急报警的开关的位置设计得离人手的距离最远,不容易误触。

图3 杖头部分结构设计图
3.2 杖身的结构设计
多功能拐杖杖身上方设有超声波传感器和播音喇叭等。杖身中空,以便各种电子元器件的安装。且有十档调节的长短伸缩管。下方设有旋转锁扣,在拐杖高度调节好以后再固定旋转锁扣,形成双重保险,保障拐杖的安全可靠。
杖身装配好后的主体形状初定为直径约2cm的圆柱形,杖身壁厚参考市面上的工艺取0.12cm。杖身具体分为上下两部分的空心圆柱形,上下部分之间采用过渡配合,上杆直径比下杆略大。上杆长度初定为45cm,外壁直径2.20cm,壁厚0.12cm。其中上杆的顶部与手柄连接固定,安装有测距传感器和播报喇叭,底部有十个调节高度档位用的小孔和一个旋转锁扣(如图4所示);杖身下杆长度初定35cm,外壁直径1.9cm。下杆与底座相连接,上面设有用于实现管伸缩的一个弹珠,下面设有与底座连接用的两个弹珠(如图5所示)。初定两杆组合后最短长度为50cm,最长长度为70cm。

图4 杖身上部分

图5 杖身下部分
3.3 底座结构设计
底座结构采用四脚底座,这种底座的特点是承重能力高,适合行走不稳的人。四脚底座稳定最好,在进行充电的时候能够稳稳立住,而单足的底座就无法完成这一点。这次多功能拐杖设计的底座高约为12.30cm。上方是半径约为4cm的圆柱形,与杖身的下部分配合连接。四角底座的每个脚半径为1cm。每个脚都安有底座脚垫,脚垫半径从最短1.50cm~2.76cm。底座结构初步设计如图6、图7所示。

图6 底座正面

图7 底座底面
4 拐杖强度校核
一般来说,人的体重都在300kg以下,考虑到使用者可能还会背上一些东西出门,取拐杖的载荷W为5000N。把手直径为3.5cm,且为实心,材料为ABS树脂。所以:
把手截面积:
A1=πr12=3846.5mm2
ABS树脂材料拉伸强度:
[σ]≧34Mpa
根据正应力公式:
σ1 =1.30Mpa≦[σ]
所以,半径为3.5cm的ABS树脂材料符合设计要求。
空心杖身半径为4cm,组合后最短长度lmin为50cm,材料是铝合金6061。
杖身截面积:
A2=lminr2=800000mm2
铝合金6061拉伸强度:
[σ]≧205Mpa
根据正应力公式:
σ2 =0.00625Mpa≦[σ]
所以铝合金材料符合设计要求。
下面是我用Pro/e的Mechanical模块对其进行有限元分析,取拐杖的载荷W为5000N,材料为ABS树脂,其有限元分析云图分布如图8所示。
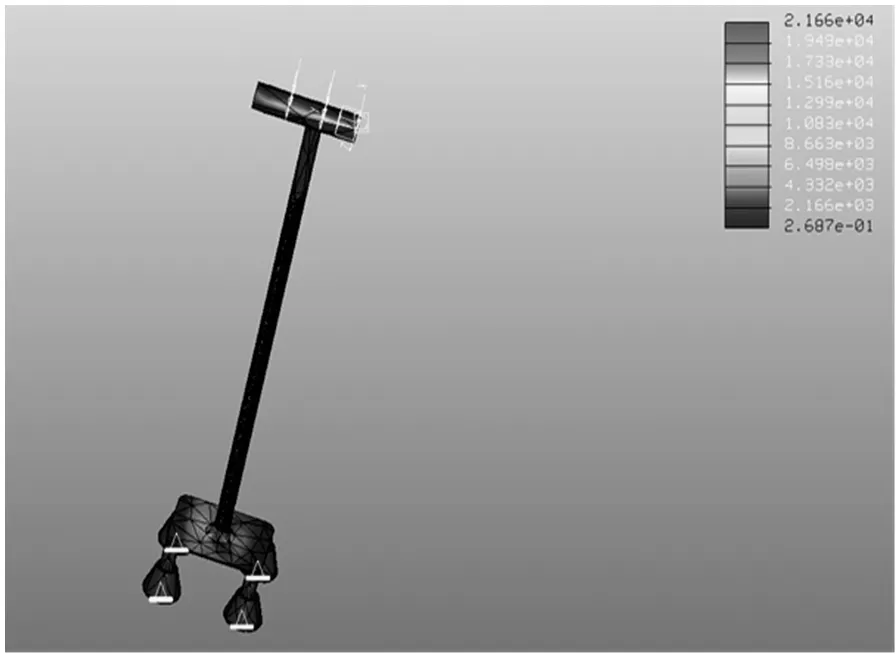
图8 拐杖应力有限元分析图
从有限元分析的云图中可以看到,整个拐杖应力最大的地方主要分布在底座的铝合金板的中间,而且数值相对比较小,不会造成过大的形变,基本达到设计要求。
本文设计的多功能拐杖为T字型,总长70cm到90cm,杖身半径分别为2.2cm和1.9cm。把手部分采用ABS树脂材料,杖身和底座采用铝合金材料,底座脚垫为防滑橡胶材料。把手舒适防滑,杆身长度分为十档调节,底座部分稳定可靠。在功能方面基于单片机的控制,有GPS定位、障碍检测报警、摔倒检测自动报警、GSM通信紧急联系、语音播报等。为各类型残疾人和老年人做了充分的考量,在想法设法降低拐杖重量的同时,还增加各种各样的实用功能。从提高使用者的体验,提高拐杖安全性,耐用性,制造成本等多方面综合考虑设计。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
一重技术(2021年5期)2022-01-18
青年文学家(2021年25期)2021-11-01
老年博览·上半月(2020年1期)2020-02-10
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
装备制造技术(2018年10期)2018-12-24
好日子(2018年5期)2018-05-30
中国新闻周刊(2016年33期)2016-10-27
大众健康(2016年8期)2016-09-28
中学科技(2015年11期)2015-11-25
