无接触配送机器人设计与仿真
2021-02-28 07:27:06辽宁石油化工大学信息与控制工程学院佀秀杰吴俊吉
电子世界 2021年23期
辽宁石油化工大学信息与控制工程学院 郭 栋 佀秀杰 吴俊吉
2020年,由新型冠状病毒(2019-nCoV)疫情导致全球公共卫生安全事件,引发各国的高度关注。疫情之下,人们的生活节奏被打乱,就连日常的快递都无法正常配送。在这样的背景下,“无接触配送”成为疫情下人们生活的刚需。
“无接触配送”是物流公司末端配送所提供的一种新颖服务实现方式。在新冠疫情引起民众的广泛关注之前,“无接触配送”已在许多领域被广泛应用,包括无人机配送、无人车配送、无人机器人配送等。2016年,亚马逊(Amazon)获得了应用无人机进行运输快件的专利。全自动无人配送机器人则已由硅谷机器人公司Nuro推出。2018年6月,在北京京东快递将无人驾驶的配送车应用到了日常配送业务中;同一年的上半年,阿里巴巴在杭州总部对由其自主研究并开发的第三代菜鸟配送机器人,进行了道路实测并获得成功。
目前,对于无接触配送的研究重点主要集中在自动驾驶技术的研究上,对于目前突发的疫情所引起的最后100m物流在配送服务上所需要改进的模式和实现方法,还没有给予足够的关注。如果将目前研究的无人配送机器人直接应用于实践中,主要存在两个方面的不足:(1)运营成本高,无法实现大范围的无接触配送;(2)在研的无接触配送机器人一般都没有消毒功能,无法满足疫情下人们对无接触配送的高要求。
本文设计了一款基于单片机的无接触配送机器人,其具有自动开箱、自动消毒等功能,以较少的成本实现无接触配送,使其能够满足目前对物流配送的实际需求。
1 系统设计
本文设计的无接触配送机器人,主要实现两个功能,即自动开箱和自动消毒,这两个功能能够确保安全可靠地将快件送到客户手上。自动开箱采用红外线遥控的方法,这种方法简单且易于实现。
自动消毒采用紫外线消毒的方法。根据国家卫健委发布的《新型冠状病毒感染的肺炎诊疗方案(试行第五版)》,可知新型冠状病毒对紫外线和热敏感。为在新冠疫情下作好防护,紫外线消毒被医疗机构和普通家庭作为主要的消毒方法之一。但是由于技术原因,很多紫外线消毒设备采用手动的机械开关,操作人员在使用过程中无法避开近距离与紫外线接触,这些情况都可能对操作人员的人体皮肤和眼睛造成损害。因此,本文采用一种紫外线消毒后延时允许开启仓门的方法,配送人员可根据配送时间提前对其进行消毒处理。
本设计是在普通智能小车上加装了货仓,通过单片机对货仓仓门进行红外遥控控制,并在仓内增加了紫外线消毒装置并进行控制。系统设计框图如图1所示。整个系统以单片机为核心,通过系统控制模块完成配送机器人的基本功能,如按收指令即行进或停止等;通过红外避障和超声波避障模块可以检测路线上的障碍物,并改变行进方向;通过红外遥控模块接收开启仓门指令并执行;通过消毒模块对仓内物品进行有效消毒。
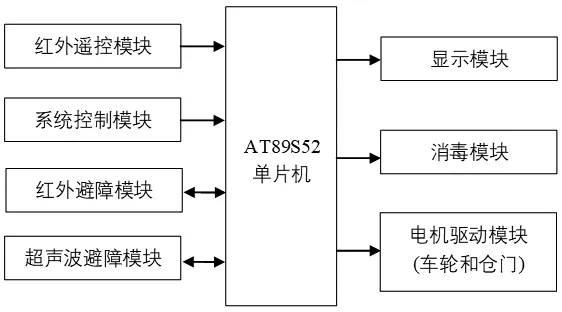
图1 系统框图
2 系统控制流程
此次小车的设计主要是使用循迹及避障模块来实现小车的自主循迹及避障这两个功能。小车的主控芯片采用STC89C52RC单片机去构成控制系统,小车的避障功能主要采用超声波接收器去发送/接收信号,当超声波在传输过程中遇障碍物时则会反弹,这时超声波接收器就是在收到信号之后对其进行计算,通过反弹的时间和速度来测量其测距,以此为基础获取一辆小车所要到达的障碍物之间的差值。在这个程序设计中,当一辆小车被检测到左右的位置与其他障碍物之间的距离超过15cm时,小车则可能会继续沿一条直线方向前进,而是当一辆小车被检测到左右的位置与其他障碍物之间的距离超过了小于15cm时,小车将可能会自动地旋转寻找一个方向以便避开其他障碍物,在躲藏或者逃脱障碍物后,小车则可能会继续沿一条直线方向前进,当小车被检测到与当障碍物的最前端相对高度小于15cm处,小车将自动停驶不在其中。
对于循迹模块功能来说,小车则主要是通过循迹模块对黑色线路进行探测,使得小车能够顺着设定的环境下按照黑色线路继续循迹地行驶和前进,当传感器发射出的红外线没有被传感器反射返回或被传感器反射返回但是强度不够大时,红外传感器的接收管将会一直保持在关断的状态,此时该模块的传感器从输出端发送到高电平的信号,这种情况下传感器就是用来指示二极管将永远都会保持在熄灭的状态;当被检测到的物体暴露在检测区域之内时,红外线被激光反射了回来而且其强度已经足够大,这时候红外线接收管就会达到饱和,此时模块的输出端输出低电平信号,在这种情况下指示二极管将被点亮,进而反馈到单片机上去控制小车按照设定的程序方式进行循迹。
为了实现仓门自动打开,以及紫外线延时开启等功能,在软件方面作了如下设计:
首先,单片机实时检测红外遥控模块是否有信号输入,为了保证不在消毒过程中开启仓门,单片机在接收到红外遥控模块信号后,需要检测消毒是否完成,若同时达到这两个条件则开启门,只要有一个条件不具备,仓门就不能开启。
其次,为了保障对货品的有效消毒和操作人员不受紫外线的危害,紫外线消毒时需要通过单片机检测仓门是否关闭,消毒完成后延时允许开启仓门。若消毒期间由于特殊原因需要开启仓门,需要按下强制开启键,该键按下后结束紫外线消毒程序,并延时可以开启仓门。
3 仿真及结果
为了验证所设计的系统的有效性,对该系统进行了仿真实验。
对于所要实现的循迹功能,对左右循迹传感器进行控制,同时将循迹功能与驱动电机控制智能小车运动配合在一起使用。当小车进行运动循迹功能工作时,循迹传感器在运动过程中检测到黑线,那么小车延时60ms后小车自动左转直到检测不到黑线为止,然后继续前进。同样,当右边循迹传感器在运动过程中检测到黑线,那么延时60ms后小车自动右转直到检测不到黑线为止,然后继续前进。若这两种情况都没有发生(即小车左右循迹模块均为检测到黑线),那么小车将一直保持前进,直到遇到黑线后,小车再一次循环之前的循迹运动,自动左转或右转进行运动去躲避黑线。
对于所要实现的避障功能,本次设计主要是通过超声波模块配合驱动电机以及单片机进行避障功能的实现。本次设计中将超声波模块连接舵机进行去全方位的勘察。当小车运动并开启超声波避障模式,那么根据程序中所设定的,当小车检测到前方无障碍物时蜂鸣器输出低电平不响,小车将信息传输回单片机,经10ms的延时后,小车继续前进。当超声波模块检测到小车右前方有障碍物时蜂鸣器输出高电平进行报警,小车将信息回传给单片机,经100ms的延时后,小车自动进行左转,直到超声波模块检测不到前方有障碍物后,小车继续前进。同样,当超声波模块检测到小车左前方有障碍物时蜂鸣器输出高电平进行报警,小车将信息回传给单片机,经100ms的延时后,小车自动进行右转,直到超声波模块检测不到前方有障碍物后,小车继续前进。当超声波模块检测到小车左右前方均有障碍物时蜂鸣器输出高电平进行报警,小车将信息回传给单片机,经50ms的延时后,小车自动停车。然后小车停车反冲自动后退,直到小车与障碍物之间的距离足够大后,经300ms的延时后,小车将自动右转,直到超声波模块检测不到前方有障碍物后,小车继续前进。
仿真实验中,仓门以电机代替,可正转或反转,表示仓门的开启或关闭;紫外线消毒以紫外线灯管为例,仿真中以LED小灯表示。仿真电路图如图2所示。
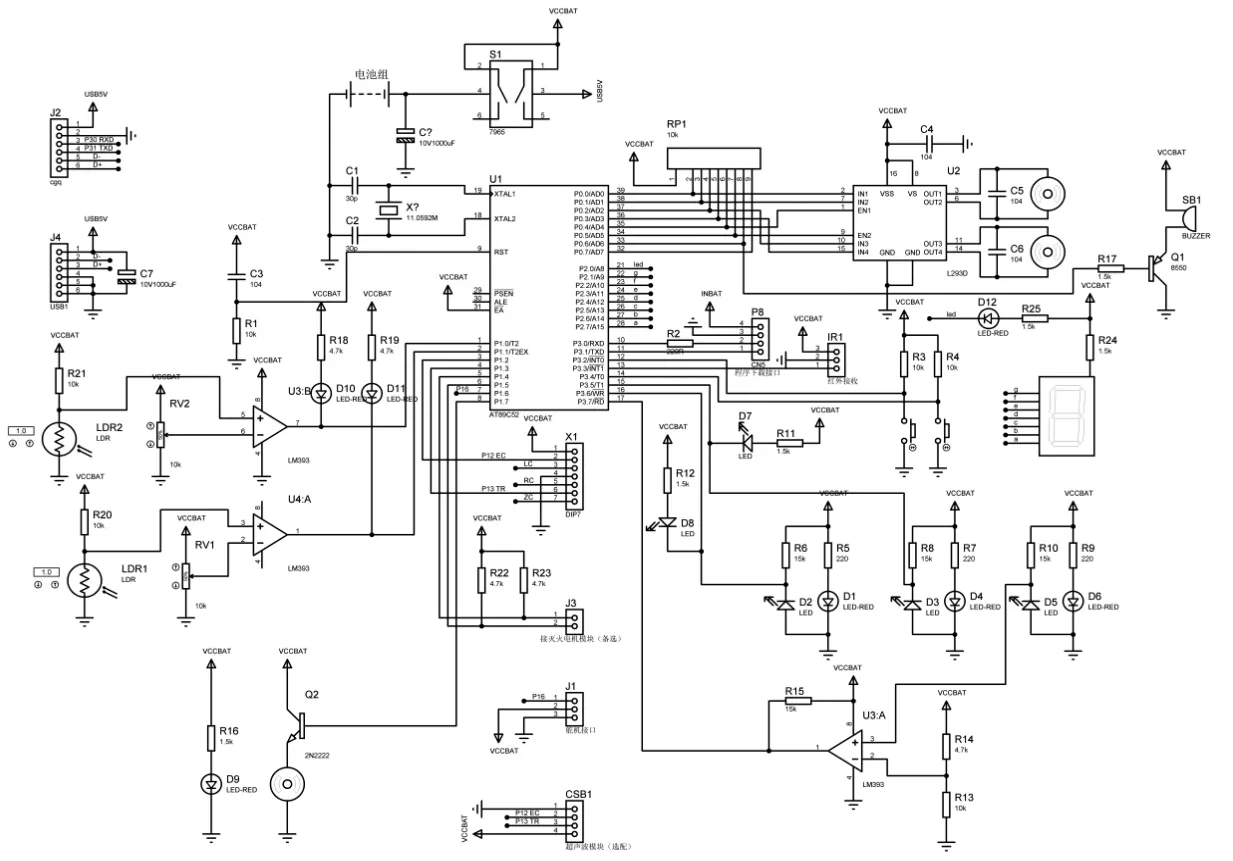
图2 电路仿真图
通过仿真实验验证了本设计的功能能够实现。本设计采用了比较简单的方法,就能够基本实现疫情下对无按触配送的要求,具有较好的实用性。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
文苑(2018年22期)2018-11-19 02:54:18
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2018年8期)2018-06-26 06:43:02
电子制作(2017年1期)2017-05-17 03:54:20
电子制作(2016年11期)2016-11-07 08:43:49