
网联电动汽车信号灯控路口经济性驾驶策略
2021-02-22 04:21:22庄伟超殷国栋董昊轩
东南大学学报(自然科学版) 2021年1期
陈 浩 庄伟超 殷国栋 董昊轩
(东南大学机械工程学院,南京 210096)
智能网联汽车(connected and autonomous vehicle,CAV)技术是目前汽车领域的研究热点,《中国制造2025》要求装备自动驾驶系统的智能网联汽车综合能耗较常规汽车降低10%以上,排放减少20%以上[1].因此在大力发展自动驾驶技术的同时,实现智能网联汽车的经济性驾驶、降低车辆能耗水平是智能车发展的重要环节.经济性驾驶技术可以通过对车速的合理规划降低车辆能量消耗、减少交通污染[2-4],城市信号灯控路口是其典型场景之一[5-6].交通信号灯作为控制车辆各向通行权限的重要交通标识,有效减少了城市路口的交通事故,保障了行人出行安全.但是由于人类驾驶员无法实时获取前方信号灯相位信息、准确避开红灯相位,在路口反复进行制动、停车,因此造成了不必要的能量损失[7-8].
从控制角度,信号灯控路口的经济车速规划方法可以分为2类:基于规则[9-11]、基于优化[12-16].其中,文献[9]为了处理信号灯动态切换导致的最优控制问题的非凸性,在上层控制器中采用了模糊逻辑控制,在得到次优解的同时保证了实时应用.文献[10]采用模糊逻辑规则对当前驾驶员进行经济性评分,并及时反馈给驾驶员.文献[11]基于驾驶员操作经验,提出驾驶员应该采取合适的中度加速度,快速平稳地加速到目标车速,并尽快切换到高档位.文献[12]采用动态规划算法优化车辆在信号灯控路口的速度谱,根据信号灯变化求解输出功率.文献[13]通过在动态规划成本函数中加入表示信号灯相位的概率信息来处理相位信息丢包或缺失的情况.文献[14]利用庞特里亚金极小值原理基于简化的车辆模型分别研究了内燃机汽车和纯电动汽车经济性驾驶的节能机理,并与数值方法进行对比,两者结果具有一致性.为了更好地将经济性驾驶控制策略投入实车使用,更多学者采用了预测控制的方法,在最优性和计算实时性之间得到了平衡.文献[15]采用了双层控制策略,上层控制器在较大的网格划分下采用动态规划算法得到了期望的经济车速曲线,下层采用模型预测控制方法实现了考虑安全车距与目标车速跟踪的滚动时域优化.文献[16]采用模型预测控制方法,预测前车状态的同时考虑信号灯相位约束,通过调节安全跟车时距和最佳巡航车速提高车辆的燃油经济性.然而基于规则的经济车速控制方法虽然实现方式简单,但控制阈值的选取过于依赖人的驾驶经验,并且节能效果有限.此外,由于车辆模型的复杂性,以动态规划为代表的优化控制方法均以数值求解为主,优化结果表现为离散的数值点,尽管具有较好的节能效果,但现有文献对各种优化控制策略背后的节能原因尚不清晰,缺乏对节能机理的统一解释.
随着车路协同技术的发展,更多智能驾驶辅助系统应运而生,其中就包括信号灯信息系统[17]以及绿波车速引导(green light optimal speed advisory,GLOSA)系统[18].前者可以使车辆实时获取信号灯相位信息和位置信息,后者可以提供通过前方路口的建议目标车速.已有研究表明,在车路协同环境下对车辆实施经济性驾驶具有较大的节能潜力[19].
针对上述问题,本文以智能网联电动汽车为研究对象,一段包含信号灯控路口的直线道路为研究场景,优化信号灯控路口智能网联电动汽车的能量消耗.为了克服动态规划等数值优化算法节能机理不清晰、计算复杂度高等缺点,借助信号灯信息系统和GLOSA系统分别获得该信号灯控路口的相位信息、位置信息和建议车速,将信号灯约束转化为定点状态约束,同时考虑到动态交通场景中车辆对未来交通信息的预测能力有限、信号灯约束条件多变等特点,提出一种双层滚动距离域车速优化策略(double-layer receding distance horizon velocity optimization strategy,DRVS), 在每一步最优子问题中采用庞特里亚金极小值原理求解能量最优的车速轨迹解析解,将信号灯控路口全局能量最优控制问题转化为分段能量最优控制问题.在此基础上,借助计算得到的分段最优解析解,分析预测能力和约束特性参数对车辆能耗的影响,揭示车联网环境下车辆经济性驾驶的节能潜力,从解析分析的角度弥补现有研究在电动汽车经济性驾驶节能机理方面的不足.
1 信号灯控路口经济性驾驶问题
1.1 问题描述
在车路协同环境下,CAV车辆可以在一定预测距离内,实时获取前方信号灯相位信息,利用GLOSA系统获取建议目标车速,再加上快速准确的优化算法,从而实时规划出满足出行需求的能量最优车速轨迹,有效降低车辆通过信号灯控路口的能量消耗.本文中具体研究场景描述如下:道路全长为send,通行时间为tend,车辆从上一路口以停车状态出发,初速度为零,终点速度设定为vend,在道路中间存在一个信号灯控路口,本文期望通过优化车辆全程速度轨迹,使电动汽车通过该路口的能量消耗最小.为了分析信号灯约束对于车辆能量消耗的影响,简化优化问题,忽略前方交通流对自车车速的影响.灯控路口经济性驾驶问题如图1所示.

图1 信号灯控路口经济性驾驶问题
1.2 最优控制问题
上述信号灯约束下车辆能量最优的车速轨迹优化问题可以转化为最优控制问题.仅考虑车辆纵向的受力情况,根据牛顿第二定律得到车辆纵向动力学方程,即
(1)
式中,Ft为车辆纵向力,包括驱动力和制动力;m为车辆质量;g为重力加速度;f为滚动阻力系数;α为道路坡度角;ρ为空气密度;CD为空气阻力系数;A为迎风面积;v为车辆纵向速度;δ为旋转质量换算系数.
选取车辆位移和纵向速度为状态量x={s,v},车轮上的单位质量纵向力为控制输入u=Ft/m,车辆的状态空间表达式为
(2)
为了降低优化求解的复杂度,使优化结果具有解析表达式,从而揭示信号灯控路口经济性驾驶的节能机理,做出如下假设:1) 车辆在城市街区中行驶,车速较低,空气阻力可忽略;2) 车辆在平直道路上行驶,道路坡度角α=0.状态空间表达式可以简化为
(3)
本文以电池功率作为成本函数,起点时刻t0,终点时刻tf.车辆在t0~tf时间段内的能量消耗表示为J,则有
(4)
式中,Pb为电池功率,与电机功率Pm和电池荷电状态SOC有关.本文假设电动汽车具有理想的再生制动,制动能量能够全部被回收,当u为正时表示驱动,当u为负时表示制动.根据文献[20],在经济性驾驶的研究中,电池的能量效率可以看作定值,本文忽略电池能量损耗,从而有Pb=Pm.为了推导出经济车速的解析表达式,不同于普遍采用的查表法,电机功率采用了文献[21]中的近似表达式,即
Pm=wmTm+Ploss
(5)
(6)
(7)
式中,i为传动系统传动比;r为车轮半径.因此,最优控制问题的性能指标可以简化为

(8)
式中,c=c1(r/i)2m2.
不失一般性,分别用v0、s0表示车辆在t0时刻的速度和位移,用vf、sf表示车辆在tf时刻的速度和位移,则求解车辆在t0~tf时间段内能量最优车速轨迹的问题可归纳为如下的最优控制问题:
(9)
s.t.
v(t0)=v0,v(tf)=vf
s(t0)=s0,s(tf)=sf
2 信号灯控路口经济性驾驶策略
在过往的研究中,人们总是假设车辆能够实时获取前方动态交通信息,例如前车车速、信号灯相位等.然而在实际交通场景中,车辆对这些信息的预测距离总是有限的,本文提出了一种双层滚动距离域车速优化策略(DRVS),如图2所示.首先,根据道路终点状态约束解析求解出不考虑信号灯约束下的全局经济性最优车速轨迹.在下层优化策略中,车辆若在预测距离内接收到信号灯信息,则以信号灯状态为目标约束,规划出局部经济性最优车速轨迹,否则跟踪上层优化速度曲线.定义信号灯约束如下:
(10)
式中,tgre为绿灯相位开始时刻,slig为信号灯位置,均可由信号灯信息系统获取;vlig为信号灯控路口的建议目标车速,由GLOSA系统获取.整个求解过程将距离域划分为N段,以步长 Δd=(sf-s0)/N向前滚动优化,k=0,1,…,N-1表示当前步数,从而实现信号灯控路口车辆能量最优车速轨迹的快速求解.

图2 双层滚动距离域车速优化策略原理图
2.1 上层车速优化策略
首先求解1.2节中的最优控制问题,将式(3)代入式(8),计算得到整个行程所需的能量,即

(11)
由式(11)可知,等式右边仅第1项与控制输入有关,其他项均与行程的起点位置和终点位置有关,只能通过合理选取行驶路径(eco-routing)而无法采用速度规划的方式节省能量.因此将式(11)右侧第1项记作Jn,作为新的性能指标,即

(12)
分别引入位移状态协量λ1和速度状态协量λ2,并定义哈密顿函数
(13)
根据庞特里亚金极小值原理的必要条件,得到如下微分方程组:
(14)
同时满足起点和终点的等式状态约束:
s(t0)=s0,s(tf)=sf
v(t0)=v0,v(tf)=vf
因此,网联电动汽车经济性最优控制问题便转化为求解上述两点边值问题.求解微分方程组(14),得到最优控制输入u*(t)
u*(t)=at+b
(15)
其中
(16)
(17)

(18)
将式(18)代入式(11)中,得到总的最优能量消耗J*

(19)

2.2 下层车速优化策略
在下层车速优化策略中,首先跟踪上层规划出的全局经济性最优车速轨迹,同时为了满足信号灯约束和避免在信号灯控路口停车,车辆以一定的预测距离实时预测信号灯相位信息,并向前做滚动优化.通过信号灯信息系统和GLOSA系统分别获取信号灯位置信息slig、相位信息tgre及建议通行车速vlig.
经济性驾驶的节能效果与车辆对未来交通情况的预测能力直接相关,若能够更好地处理交通约束,则可以避免更多的能量消耗.为此,本文考虑了2种交通信息预测能力:无限预测(infinite prediction)和有限预测(finite prediction).
2.2.1 无限预测
假设车辆装备有理想的车载传感器和通讯设备,车辆在确定目的地和行驶路径后,便能够完美预测前方道路的信号灯位置及相位信息,获取GLOSA系统的建议车速.根据信号灯约束条件,整个行驶过程可以分为2个阶段:第1阶段车辆从起点出发,以获取的信号灯信息为目标约束条件,优化车速轨迹,此阶段称为调整阶段;第2阶段车辆驶离路口,以终点状态为目标约束条件,跟踪上层优化速度轨迹,此阶段称为跟踪阶段.在调整阶段,起点时刻、起点速度、起点位移均为零,终点时刻为tgre, 终点速度为vlig, 终点位移为slig.在跟踪阶段,起点时刻为tgre, 起点速度为vlig, 起点位移为slig, 终点时刻为tend, 终点速度为vend, 终点位移为send.
根据式(18)和(19),无限预测情况下与控制输入相关的能量消耗记为JnI,其中调整阶段和跟踪阶段的能量消耗分别记为JnIA和JnIT,总能量消耗记为JI,则有
JnI=JnIA+JnIT
(20)
(21)
2.2.2 有限预测
(22)
由此可以计算出tT.调整阶段的起点状态为跟踪阶段T1的终点状态,调整阶段结束时车辆应到达信号灯控路口,用tA表示调整阶段结束时刻,则有
tA=tgre
(23)
调整阶段的终点速度为vlig,终点位移为slig.跟踪阶段T2的起点状态为调整阶段的终点状态,跟踪阶段T2结束时以期望的时间、速度到达目的地,终点时刻为tend,终点速度为vend,终点位移为send.

(24)
(25)
根据式(18)和(19),有限预测距离情况下与控制输入有关的能量消耗记为JnF,其中跟踪阶段T1、调整阶段、跟踪阶段T2的能量消耗分别记为JnFT1、JnFA和JnFT2,总能量消耗记为JF,则有
JnF=JnFT1+JnFA+JnFT2
(26)
(27)
2.3 DRVS策略流程
综合2.1节和2.2节,可以通过DRVS策略实现车辆在信号灯控路口的经济性最优驾驶.策略流程如下:
① 依据驾驶员的出行需求,确定终点状态约束,包括终点位移send、终点时间tend、终点速度vend.
② 滚动距离域划分.将整个行驶距离平均划分为N段,滚动步长为Δd,k= 0,1,…,N-1表示当前步数.
③ 初始化,k=0.

⑤ 交通信息获取.车辆在预测距离spre内,若发现信号灯,令wf=1,同时通过信号灯信息系统获取信号灯相位信息tgre、位置信息slig,通过GLOSA系统获取建议目标车速vlig.

⑦ 滚动优化,k=k+1.
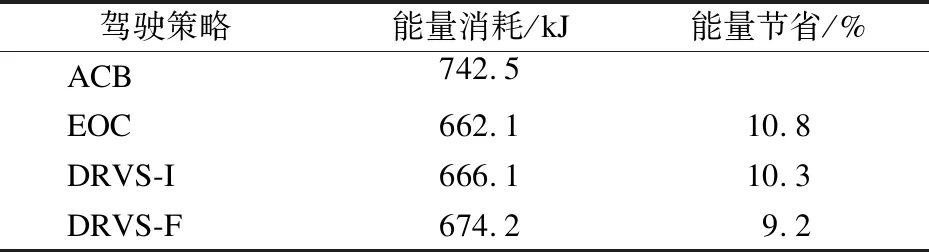
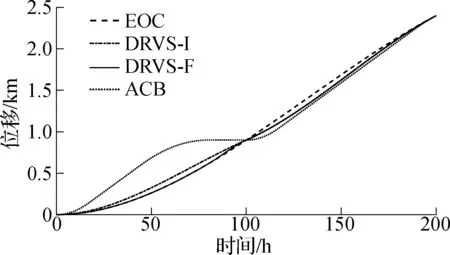
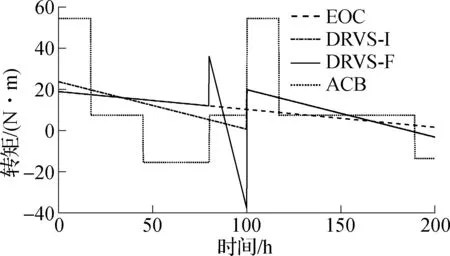
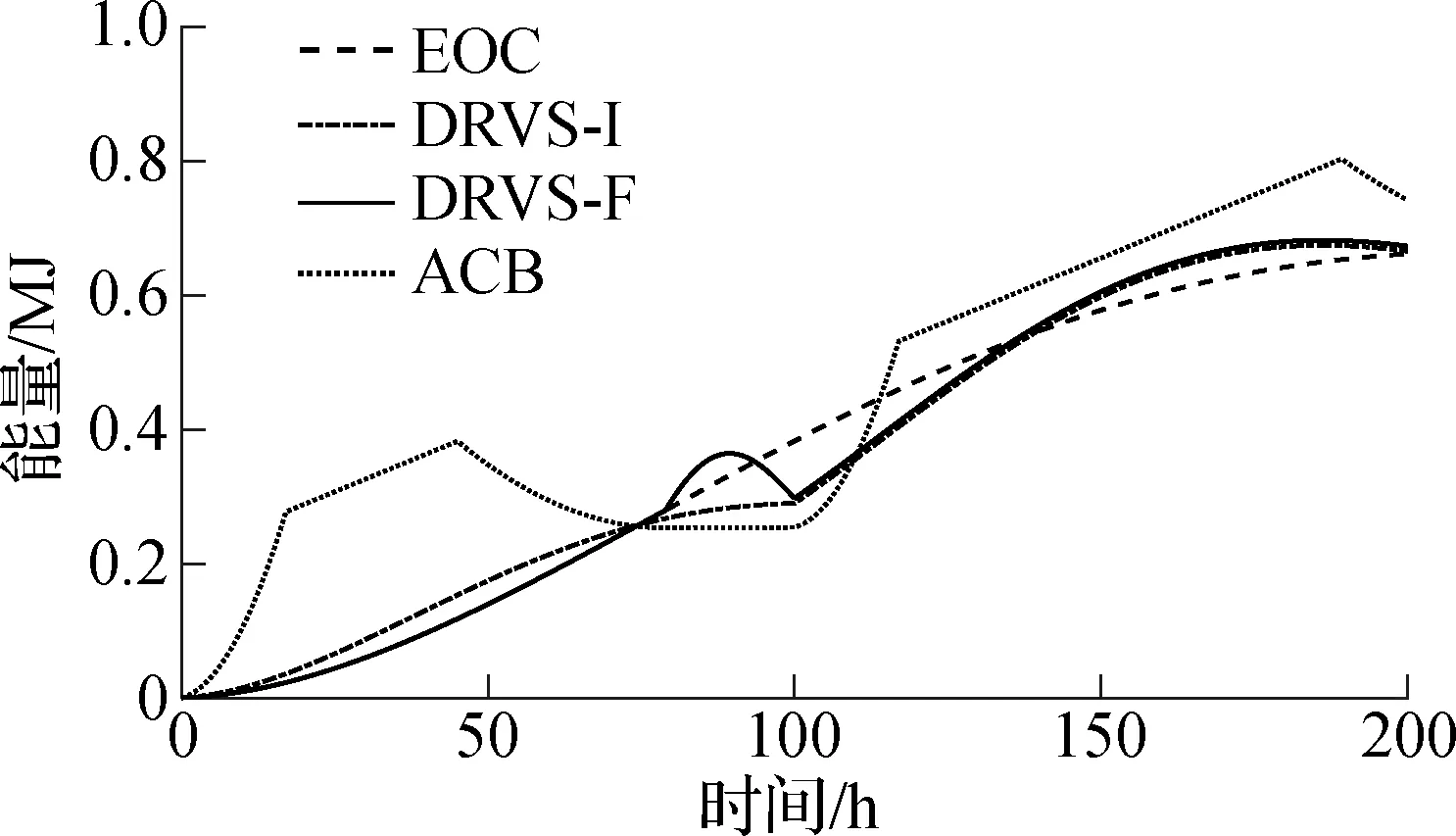
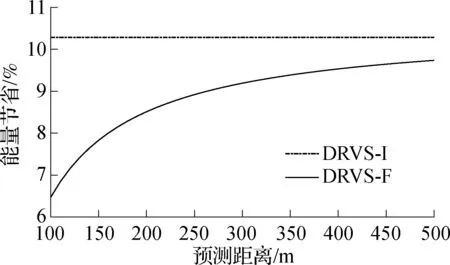
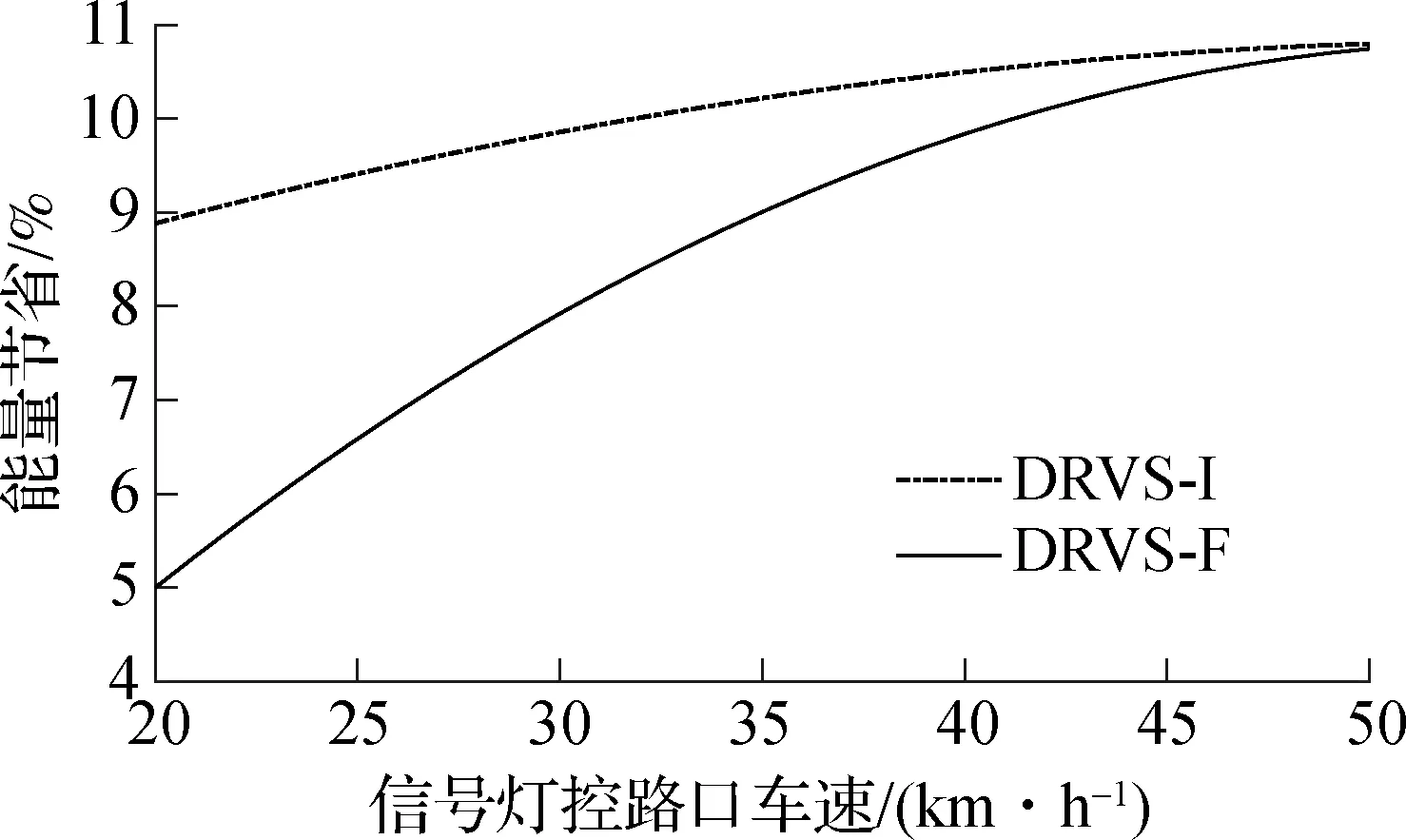
⑧ 判断循环终止条件.若k ⑨ 记录下分段最优车速序列(v*(0),v*(1),v*(2),…,v*(N-1)). 得到的分段最优车速序列具有封闭的解析解形式,可以实现信号灯控路口快速实时的经济性最优驾驶策略优化. 本文仿真环境设置如下:道路全长send=2.4 km, 通行时间tend=200 s, 终点速度vend= 12 m/s, 电动汽车整车质量m= 1 421 kg, 滚动阻力系数f=0.016, 传动系统传动比i=9.81, 车轮滚动半径r=0.325 m, 旋转质量换算系数δ=1.022, 电机特性参数c1= 0.873 0.在DRVS策略中,预测距离spre=300 m, 滚动步长Δd= 1 m, 整个行驶路程划分为N=2 400段.从GLOSA系统获取的路口建议车速vlig=10 m/s, 通过信号灯信息系统获取信号灯相位信息,绿灯开始时刻tgre=100 s, 信号灯位置信息slig=900 m, 重力加速度g= 9.8 m/s2.仿真建模软件采用MATLAB(R2018a),电脑配置为Intel Core i7-10510U@1.80 GHz CPU和16 GB RAM. 为了得到能量消耗的解析表达式,分析预测距离和信号灯约束特性参数对DRVS策略节能效果的影响,采用摄动法求解式(21),并代入仿真参数,确定有限预测下跟踪阶段结束时刻,即 (28) (29) 式中,P表示各种策略相对ACB策略的能量节省;Jt表示能量消耗.不同策略的能量消耗对比见表1. 表1 不同策略能量消耗对比 从表1中可以看出,不考虑信号灯约束的EOC策略能量消耗最低,图3(a)中EOC速度曲线是一条光滑的抛物线,图3(b)中EOC转矩输出没有大的跳变,从尽可能减少加减速的角度考虑,EOC策略的结果是合理的.其他策略相较于EOC策略引入了信号灯约束,能量消耗均有增加,这主要体现在为了满足信号灯约束,车辆进行了额外的制动、加速操作,造成了转矩的大幅度变动,这表明尽管驾驶员可以通过车路协同技术提前获知前方路口的交通信息,做出一定程度的预判,但信号灯控路口的存在还是会导致车辆能量消耗增大,这也是车辆在城市道路中行驶能耗大的原因之一.ACB策略的能量消耗最高,达到了742.5 kJ,从图3(c)和图3(d)可知,ACB策略转矩变化较大,车辆从静止开始加速,由于无法获取前方信号灯相位信息,前期过多加速,在红灯相位内到达路口并制动停车,造成了不必要的能量损耗.本文提及策略均考虑了理想的制动能量回收,在图3(d)中出现了能耗下降的情况,在非理想制动能量回收的情况下,路口制动停车带来的能量损失更大,DRVS策略的节能效果会更加明显.在DRVS-F策略中,由于预测距离有限,车辆不能及时获取信号灯相位信息和GLOSA建议车速信息,相较于DRVS-I策略能量消耗有所增加,DRVS-F策略和DRVS-I策略相比ACB策略能量消耗分别减少了9.2%和10.3%.从图3(a)可知,DRVS-I策略能够更早地获取信号灯相位信息,提前规划车速,避免在接近路口处进行速度调整,整个过程分为上文所述的2个阶段:调整阶段和跟踪阶段.而DRVS-F策略由于预测距离有限,在接近路口时进行了速度调整,为了在绿灯相位到达路口,进行了加减速操作,造成了一定的能量损失,整个过程分为3个阶段:跟踪阶段、调整阶段、跟踪阶段.在速度曲线上,DRVS策略较ACB策略速度变化较小,减少了不必要的加速与减速,从而降低了能耗.采用庞特里亚金极小值原理求解信号灯控路口的经济性驾驶问题,最优控制率、最优车速轨迹均具有普遍性和封闭表达式,在DRVS策略中,将每一最优子问题 (a) 速度变化曲线 (b) 位移变化曲线 (c) 转矩变化曲线 (d) 能量变化曲线 的边界约束条件代入通用表达式中,便可确定当前的能量最优车速轨迹,有效避免了动态规划等数值算法的复杂计算,实现了经济车速的快速规划.DRVS-F策略的计算时间为16.584 s,平均每一次迭代计算的时间为6.91 ms,在计算时间上优于动态规划等数值算法[22]. 由于EOC策略不考虑信号灯约束,ACB策略是模仿驾驶员的加速—匀速—制动策略,均不受预测距离和信号灯控路口车速的影响,因此仅对比2种DRVS策略.为了分析预测距离对车辆节能效果的影响,令路口建议车速vlig=36 km/h,不同预测距离的能量节省情况如图4所示.随着预测距离的增加,DRVS-F策略相较于传统ACB策略的能量节省也逐渐增大,预测距离从100 m增加到500 m,能量节省提高了4%,若预测距离进一步增大,同时考虑多信号灯控路口的车速优化,能量节省效果将进一步提高.这表明能够对未来交通信息做出预测的智能网联汽车存在巨大的节能潜力,并且预测能力越强,节能效果越好. 图4 不同预测距离下的仿真结果 通过信号灯控路口的车速同样会影响车辆的节能效果,令预测距离spre= 300 m,如图5所示,随着信号灯控路口建议目标车速的提高,2种DRVS策略的能量节省逐渐增加.当车速由20 km/h提高到50 km/h,DRVS-I策略和DRVS-F策略的能量节省分别提高了2%和5%.如上文所述,本文考虑了理想的制动能量回收,在实际情况下,当通过信号灯控路口的车速降低时,能量消耗会进一步增大.因此,以较高的车速通过信号灯控路口、避免停车是车辆在城市道路中节能的关键. 图5 不同路口车速下的仿真结果 1) 本文基于信号灯信息系统和GLOSA系统将信号灯约束转化为定点状态约束,提出了一种双层滚动距离域车速优化策略.采用庞特里亚金极小值原理求解每一阶段的最优子问题,并根据预测距离和信号灯约束将车辆在信号灯控路口的全局能量最优问题转化为分段能量最优问题进行解析求解,从理论上分析了预测能力和约束特性参数对车辆能耗的影响,揭示在车联网环境下的经济性驾驶的节能潜力. 2) 所提出的DRVS-F策略和DRVS-I策略相较于传统车辆驾驶员的ACB策略分别有9.2%和10.3%的能量节省,说明所提出的车速优化方法能够对车辆通过信号灯控路口的车速进行合理规划,减少能量损失.随着预测距离的增大,DRVS-F策略的节能效果也越好,说明车路协同环境下车辆具有巨大的节能潜力,在经济性驾驶的基础上,借助车路协同技术实时预测未来交通变化,获取交通信息,可以进一步降低车辆的能量消耗. 3) 本文基于信号灯信息系统和GLOSA系统对信号灯约束进行简化,实现对最优控制问题的分段求解,旨在对电动汽车经济性驾驶问题提供一种解析的处理方式.所提出的DRVS策略的经济性最优控制率以及最优车速具有封闭的解析形式,可以揭示智能网联电动汽车的预测节能机理,分析特性参数对能量消耗的影响,实现经济车速的快速规划.3 仿真结果与分析
3.1 驾驶策略对比


3.2 预测距离与信号灯参数的影响
4 结论
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21 03:20:00
体育科技文献通报(2022年3期)2022-05-23 13:46:20
房地产导刊(2022年4期)2022-04-19 09:04:10
汽车工程师(2021年12期)2022-01-17 02:29:58
作文中学版(2020年1期)2020-11-25 03:46:21
小学科学(学生版)(2019年3期)2019-03-30 01:39:28
小天使·一年级语数英综合(2018年6期)2018-06-22 10:25:54
华人时刊(2016年19期)2016-04-05 07:56:05
四川电力技术(2015年5期)2015-12-19 11:04:54
减速顶与调速技术(2015年4期)2015-03-16 03:39:41
