
基于自适应估计的机载三维激光轨迹校正研究
2021-02-15 07:53:08曾凯
经纬天地 2021年6期
曾 凯
(福州市勘测院,福建 福州 350300)
0.引言
机载三维激光扫描系统是现阶段高精度获取地面信息的新型测量技术,在激光测距的基础上融合了差分定位技术、姿态分析技术、高分辨率影像采集技术[1,2]。
三维激光扫描技术精度高、数据获取快、数据量大,凭借其优势,被广泛应用在各领域测绘工作中,尤其在数字城市、地形图测绘、文物修复等领域被广泛应用[3]。现阶段,激光三维扫描技术高度集成,设备体型已具备在无人机平台上搭载的可行性[4]。
机载三维激光扫描系统的定位精度受多个因素影响,其中轨迹解算精度对点云数据获取精度影响较大,在硬件设备限制的情况下,很多学者通过构建函数模型和动力学模型对无人机的飞行轨迹进行修正,以提高机载三维激光扫描系统轨迹解算精度,从而提高点云数据精度。
卡尔曼滤波(Kalman)数据处理算法普遍应用在动态定位数据分析中,但其原理是在高斯白噪声的基础上构建的,在机载三维激光扫描系统中,动态GNSS(Global Navigation Satellite System)的观测误差存在有色噪声,不属于高斯白噪声序列,直接将卡尔曼滤波算法应用在机载三维激光扫描系统的轨迹解算修正中,获取的数据精度较低,结果不可靠[5]。
针对机载三维激光扫描系统存在有色噪声的问题,一般通过函数模型补偿滤波或随机补偿函数滤波进行滤波解算实现有色噪声控制。本文主要以函数模型补偿滤波实现了对有色噪声的滤波控制。函数模型拟合滤波是函数模型补偿滤波的一种,利用有色观测噪声和有色状态噪声可实现函数模型拟合滤波的构建,首先利用预报有色观测噪声和状态噪声,修正观测值和状态预报值,经修正后的观测值和状态预报值可实现滤波处理,实现有色噪声控制。卡尔曼滤波算法可利用观测残差序列和状态残差序列进行模型补偿,同时观测残差序列和状态残差序列也可对有色噪声的随机模型进行调节,控制有色噪声对状态参数估值的影响。
本文针对机载三维激光扫描系统轨迹解算精度问题,首先对其机载三维激光扫描系统构成、工作原理以及精度影响因素进行了分析,并根据有色噪声的特点,基于BDS/INS紧组合的观测残差和状态预测残差,通过有色噪声建模对无人机轨迹解算过程中的有色噪声进行削弱,以四星座GNSS/INS紧组合的轨迹作为参考值,对比了顾及有色噪声与否对轨迹解算精度的影响,再通过在实验测区采集的检核点对比顾及有色噪声与否对点云精度的影响。
1.机载三维激光扫描系统
机载三维激光扫描系统是将多种技术进行融合并搭载到飞行器平台上的组合系统(如图1所示),核心构成包括用于激光发射的激光探测及测距系统,用于飞行器定位导航和坐标实时采集的差分定位系统,用于测定激光扫描仪实时姿态的惯性测量系统INS(Inertial Navigation System),用于航摄影像同步记录的CCD(Charge Coupled Device)相机设备,以及中心控制系统、存储系统、在线处理软件等。
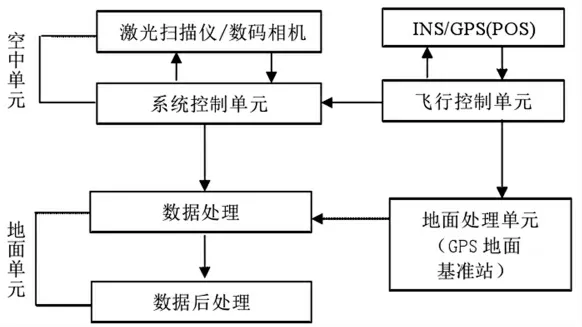
图1 机载三维激光扫描系统
1.1 载体平台
三维激光扫描系统无人机搭载平台可分为固定翼无人机平台和多旋翼无人机平台,其中固定翼无人机平台续航时间长,而多旋翼无人机平台环境适应能力较强,垂直起降功能可适用于复杂地形。
1.2 激光测距系统
激光测距技术主要依靠激光器发出激光,发射器进行激光信号发射,经物体反射后,由接收器进行信号接收,此过程包括光信号向电信号转换,结合时间延迟测量处理后进行存储。现阶段主要以脉冲测距为主,可由式(1)计算测量目标到激光测距系统距离:

式(1)中,R为测量目标到激光测距系统距离;c为光速;t为激光发射到接收的时间间隔。
1.3 差分GPS与惯性导航组合系统
在测量范围内均匀设置多个参考站,构建差分GPS系统(DGPS,Differential Global Position System),工作原理如下:飞行器平台上的接收机实时接收卫星信号,计算其空间三维位置,基准站独立观测,为用户提供卫星星历校正数、钟差改正数和大气延迟模型。其优势在于能够高精度实现定位和测速,误差不累计,但其数据输出频率较低,无法记录姿态参数,容易失锁。
惯性导航系统(INS)内安置有陀螺、加速计等设备,根据空间力系原理,可测定飞行器三个坐标的加速度与角速度,以此计算飞行器飞行状态下的姿态、位置和速度等信息。其优势在于能够高精度实现定位和测速,可实现姿态参数记录,输出频率高,可瞬时记录,但其误差存在累计。
差分GPS系统与惯性导航系统结合,互相弥补短板,克服了INS系统误差累计的情况,进而提高了姿态参数的测量。
1.4 定位原理
结合式(1),可计算出激光发射器到待测目标的距离(如图2所示),利用IMU(Inertial Measurement Unit)系统记录的相对位置、姿态、速度参数,DGPS系统记录的飞行器位置数据,利用式(2)、(3)即可计算点P三维坐标(Xi,Yi,Zi)。

图2 机载三维激光扫描系统定位原理
式(2)中,φ,ω,κ分别为IMU系统提供的俯仰角、侧滚角、航偏角;β为扫描角;R为激光向量的模,即距离。
由上述可知:待测点的三维坐标由上述8个参数计算可得,即待测点坐标精度取决于这8个参数测量精度,同时参数精度受激光扫描仪机架的翻滚角、俯仰角和航偏角,IMU机体同载体坐标轴间的视轴偏心角等系统误差影响,在系统误差不可避免的情况下,为提运动轨迹观测精度,通常利用函数模型和运动学模型进行参数修正。
2.基于有色噪声及其协方差矩阵的自适应估计算法
将BDS/INS紧组合系统的待估参数,设为状态矩阵x,对卡尔曼滤波进行线性化处理结果,如式(3)、式(4)所示:

式(3)、式(4)中,Lk为观测向量;Hk为观测设计矩阵;xk分为k时刻的系统状态;xk-1为k-1时刻的系统状态;Φkk为k时刻的状态转移矩阵;Φk-1为k-1时刻的状态转移矩阵;wk为统计特性为零的状态噪声;ek为统计特性为零的观测噪声。当wk、ek为统计特性不为零时,可表示为一阶自相关模型。
根据卡尔曼滤波线性估计可知,新息序列和观测残差与观测值有色噪声可以相互体现,利用多个历史观测历元的观测残差作为有色观测噪声样本,状态残差序列作为有色状态噪声样本,分别计算有色观测噪声估值和有色状态噪声估计,有色噪声修正后的观测值以及修正后的状态预报值的协方差矩阵。
差阵的拟合精度具体计算方法:把有色噪声样本值的每次观测历元都进行更新,每次都将最新的N个观测历元观测残差作为样本。当k>N时,即可得到N组观测残差序列,由最小二乘求得,如式(5)所示:

由式(5)可得:有色噪声系数矩阵估值以样本Vk-1替代ek-1,将有色观测噪声相关系数矩阵估值带入,计算有色观测噪声估计和有色状态噪声估值。将ri作为噪声ηi的样本值,将开窗法自适应的估计ni的协方差矩阵应用在卡尔曼滤波解算中,利用状态残差序列结合开窗法自适应的估计应用在卡尔曼滤波解算中,可求解有色状态噪声wˆk和协方差矩阵Qˆk,其公式如式(6)所示:


式(7)中,

3.实验与分析
测区位于福建省福清市,以将近3km的现状硬化道路为项目,两侧地形主要是居民地、农田。根据项目要求,现状道路高程精度要求较高,需低于3cm,通过上述理论对无人机飞行轨迹解算精度进行改进,以此提高点云精度。
外业数据采集使用大黄蜂多旋翼无人机,搭载RIGAL VUX-1LR激光雷达,测量距离可达920m,激光测距精度为1cm,点频达到50万点/s。具体航线(如图3所示),飞行高度为150m,来回航线间距为60m,飞行速度设置为7m/s,为确定无人机精确位置,需通过地面GNSS、CORS基站进行数据获取采集,完成GNSS/IMU数据和激光数据的外业采集。在测区中间选取已知点架设GNSS基准站(基站位置如图3中绿色三角形所示),与激光雷达系统中的定位模块同步进行采集,高度截止角可设为15°,基站接收机采样时间间隔可设为1s。完成外业数据采集后,利用后差分BDS/INS紧组合模式进行无人机轨迹解算,在解算过程中应注意,需顾及有色噪声的卡尔曼滤波算法和不顾及有色噪声的标准卡尔曼滤波,再以四星座GNSS/INS紧组合的轨迹作为参考值,对比顾及有色噪声与否对轨迹解算精度的影响。

图3 无人机飞行航线
在改正有色噪声的情况下得到的误差较未改正有色噪声的要更接近零值(如图4所示),且无人机轨迹的波动更小,有效抑制了一些无人机机动或扰动的误差,尤其是无人机中间转弯部分,高程出现明显误差,顾及有色噪声进行改正可以明显降低误差,提高无人机轨迹解算精度。顾及有色噪声的定位精度较未顾及有色噪声的定位精度在三个方向分别提升了14.5%、17.8%、15.5%,三维点位精度提升了17.7%。(如表1所示):
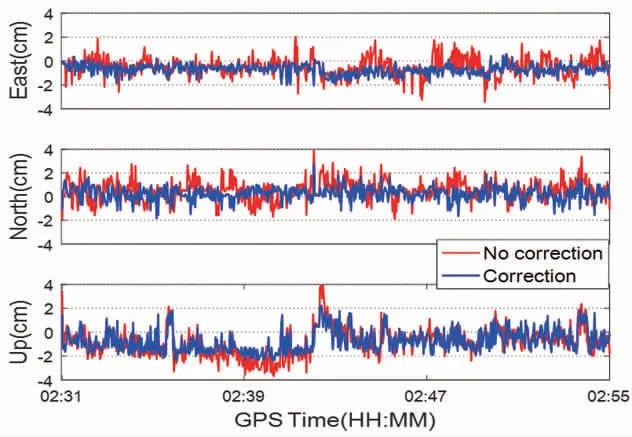
图4 无人机轨迹精度对比

表1 道路形态不同时顾及有色噪声与否的定位误差单位:cm
为检验两种方法解算精度,采用检核点四等水准测量结果与每种解算方法进行精度对比分析,具体方法是在硬化地面内均匀布设80个地面检核点,分别计算每种方法点云数据相应检核点的高程值,并进行对比分析。
首先将顾及有色噪声改正解算的轨迹数据与激光雷达点云数据融合,再将正常解算出的轨迹数据与激光雷达点云数据融合,生成有位置信息的激光点云数据。
分别将四等水准测量所获取的检核点高程数据,在上述融合后的点云数据中进行点云内展点,部分检核点展点结果(如图5所示)。完成展点后,即可获取顾及有色噪声改正算法融合点云和正常轨迹解算融合点云的检核点所在位置高程。分别提取两种算法下的检核点位置高程,并与四等水准测量检核点高程进行对比,并取差值记为dz。

图5 部分检核点在点云中位置
计算80个检核点四等水准测量高程和检核点两种算法高程差值dz,得到统计结果(如表2所示)。由表2可知:顾及有色噪声改正的点云与检核点之间的高差明显比未顾及有色噪声改正的高差更小,有71个检核点高差小于3cm,只有9个点的高差超过3cm,而改正之前超过3cm的点有22个,可见顾及有色噪声可以提高点云精度。

表2 不同检核点高差分布 单位:个
分别计算80个检核点四等水准测量高程与检核点两种算法高程差值dz的平均差和中误差,结果(如表3所示)。由表3可知,顾及有色噪声改正的高差dz较未顾及有色噪声改正的高差dz在平均差方面降低了32.3%,在中误差方面降低了31.3%,由此证明了基于有色噪声及其协方差矩阵的自适应估计算法可以削弱有色噪声的影响以提高无人机轨迹精度,进而提高点云精度。

表3 点云误差 单位:cm
4.结束语
无人机机载三维激光扫描仪的航测技术相比传统测绘方式缩短了工作时间,可获取海量数据,但点云精度受多个因素影响,本文主要探讨了无人机轨迹解算对点云的影响情况,并提供了解决方法。本文将基于有色噪声及其协方差矩阵的自适应估计算法应用于无人机轨迹解算中,通过削弱有色噪声的影响提高无人机轨迹精度,进而提高点云精度。实验表明顾及有色噪声的定位精度较未顾及有色噪声的定位精度在三个方向分别提升了14.5%、17.8%、15.5%,三维点位精度提升了17.7%,顾及有色噪声改正的点云高差dz较未顾及有色噪声改正的点云高差dz在平均差方面降低了32.3%,在中误差方面降低了31.3%。这证明基于有色噪声及其协方差矩阵的自适应估计算法可以有效提高点云精度。
猜你喜欢
雪豆月读·低年级(2023年3期)2023-09-06 18:12:26
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
装饰装修天地(2020年7期)2020-06-01 18:43:59
自动化学报(2019年6期)2019-07-23 01:18:32
Coco薇(2017年8期)2017-08-03 02:06:57
工业设计(2016年7期)2016-05-04 04:01:15
新校长(2016年8期)2016-01-10 06:43:49
河南科技(2015年8期)2015-03-11 16:23:52
