
基于关联规则算法的不动产边界三维测量方法
2021-02-15 07:53:08王洪
经纬天地 2021年6期
王 洪
(福州君道空间信息技术有限公司,福建 福州 350001)
0.引言
对数字地球这一概念进行延伸,我国提出了数字中国的概念,也就是以我国整体为对象对数字地球系统进行实践。在这个十分浩大的工程中,数字城市作为应用示范和试验田应运而生,是信息化、数字化建设工作的实际切入点[1]。该项目对多种技术进行了综合应用,能够对城市的复杂系统实施虚拟仿真与网络数字化管理[2]。说得更概括一些,就是通过数字城市能够实现城市可视化和优化决策支持功能,使政府作出更加科学的决策,提升城市建设时效[3]。
随着三维可视化相关技术的不断发展,城市不动产三维影像成为数字城市中的重要研究方向。对不动产边界进行测量对于建筑物三维模型建造以及规划城市三维空间等都有很大意义,因此要重视对不动产边界三维的精确测量问题研究。
对于不动产边界三维测量问题的研究,国内外研究的方向和侧重点不同,都取得了多样化的研究成果。国外主要针对可视化、场景交互等方向进行研究。有学者通过场景交互技术进行不动产边界的三维测量与建模。还有学者通过不动产图像集合及其深度映射对不动产三维场景模型进行表示,从而实现其边界三维测量。而国内则主要针对硬件方向进行研究。有学者设计了一种不动产激光扫描仪,通过该激光扫描仪对不动产边界进行三维数据测量。还有学者通过Range scanner、结构光等硬件进行不动产边界的三维测量。由于以上方法存在应用场合受限、操作复杂、成本比较高昂等问题,所以在对不动产边界三维测量问题进行研究的过程中,应用关联规则算法进行不动产边界图像三维数据的挖掘,基于挖掘的三维数据可以实现对不动产边界的精确三维测量。
1.设计基于关联规则算法的不动产边界三维测量方法
1.1 生成不动产图像交易数据库
通过近景三维测量系统对不动产边界图像进行捕捉,并生成不动产图像交易数据库,用于进行三维数据挖掘[4]。使用的近景三维测量系统是多种先进设备的集成体,具体包括移动计算机、CCD数码相机、激光扫描仪以及全球定位系统。该系统主要将机动车辆或无人机作为扫描平台,是一种用于建筑物测量的测量系统,能够实时、迅速、动态地对不动产地理图像进行获取[5]。其中CCD数码相机负责对不动产影像图片进行拍摄,在不动产为高层建筑时,还可以对激光扫描仪的数据获取起到辅助作用。
在使用近景三维测量系统时,为构建不动产图像交易数据库,需要对扫描数据进行处理以及实施坐标转换,为实现该功能对系统的配套数据处理系统进行开发。开发的配套数据处理系统的工作模式(如图1所示):

图1 开发的配套数据处理系统的工作模式
1.2 图像边界三维数据挖掘
基于关联规则算法进行不动产图像边界三维数据的挖掘,具体包括两个步骤:(1)是频繁项集的产生;(2)是关联规则的产生。
1.2.1 频繁项集的产生
在对不动产边界图像三维数据频繁项集进行生成的过程中,需要多次扫描不动产边界图像交易数据库[6]。首先对不动产边界图像交易数据库进行遍历,寻找三维数据候选1-项集,通过C1为该三维数据项集。对单个项的对应支持度进行计算,对于那些阈值大于最小支持度的项,将其记为L1,定义为三维数据频繁项集。接着把三维数据频繁项集当作算法中的种子项集,通过种子项集的自连接实现三维数据候选2-项集的生成,记为C2。再对不动产边界图像交易数据库进行扫描,对三维数据频繁2-项集进行生成,记为L2。利用三维数据频繁2-项集对三维数据频繁3-项集进行生成,记为L3。不断重复该过程,直至无法生成新的三维数据频繁项集。
以上迭代过程具体分为两个子步骤:连接步、剪枝步。
(1)连接步。Lk-1和其自身相连接,对Ck进行生成。将Lk-1内的元素用si来表示,其中si元素的第k项用si[]k来表示。通过字典序对三维数据项集内的项进行排列,执行Lk-1的自连接。对于si来说,其可连接的条件具体如下:前(k-2)项相同,而第(k-1)项则不同。
也就是s1、s2在满足式(1)时:

则s1与s2称为可连接关系,连接时的对应结果项集如下:

(2)剪枝步。通过关联规则对三维数据候选k-项集进行性质压缩,接着计算压缩以后Ck的支持度,从而对三维数据频繁k-项集进行确定。
在迭代时,每次生成三维数据频繁项集时都要对不动产边界图像交易数据库进行扫描,以便对三维数据候选项集的对应支持度进行计算,从而发现全部三维数据频繁项目集[7]。然而每次都对支持度进行计算需要极大工作量才能完成,因此需要对三维数据候选项集的实际数量进行缩减处理,也就是对搜索空间进行压缩。
1.2.2 关联规则的产生
这一步骤是在三维数据频繁项集中对与最小置信度阈值相符合的规则进行寻找。其实现步骤具体如下:
(1)用FI表示各三维数据频繁项集,对其全部非空子集进行生成,用SFI来表示。
(2)对于SFI来说,当满足式(2):

式(2)中,Support_count代表出现事务数;minConf代表最小置信度阈值。
则会产生以下的规则,如式(3)所示:

式(3)中,规则即为所生的关联规则。
对最小支持度阈值进行设定后,开始运行关联规则算法,首次对不动产边界图像交易数据库进行扫描时,仅对各项目实际值的具体数量进行计算,从而对三维数据大型1-项集进行确定[8]。之后对不动产边界图像交易数据库进行遍历的时候,需要实施连接和剪枝,一直到所产生的Lk是空集,则停止算法,实现不动产图像三维数据的挖掘。
1.3 边界三维测量
在挖掘的三维数据中对扫描点进行提取,接着对扫描线进行提取,实现不动产边界的三维测量。在对扫描点进行提取的过程中,首先对粗差点进行剔除,将剩下的点用[Hi,Hi+1...Hj](1≤i≤j≤n)来表示,并对对应最高点进行寻找,用[Ti,Ti+1...Tj](1≤i≤j≤n)来表示。对于Ti和Hi间的点,以扫描点的角度值和距离为依据,对是否有突变存在进行判断[9]。在某时刻有Dm这一扫描点和该点的相邻点Dm-1,当成立式(4):

式(4)中,Am、Am-1为Dm和Dm-1间的随机点;ε为突变阈值。
此时认为Dm和Dm-1是可疑特征点。
对实际特征点进行选择时,需要参照下式,如式(5)所示:

式(5)中,Lm、Lm-1为Am和Am-1间的随机点。
在Am和Am-1间对较小的点进行选择,将其作为特征点,也就是选择不动产上比较突出的、距离扫描仪有着较短中心水平距离的点,将其当作特征点。其中ε需要以不动产的具体表面情况为依据进行取值,具体取值范围为0.3~0.6。用H表示提取出的扫描点。
接着对不动产边界的扫描线进行提取。对于H来说,用T表示该点对应的扫描线顶部点,对全部扫描线的对应水平点,通过拉依特准则实施粗差处理,实现扫描线的提取[10]。其中粗差处理具体步骤如下:
等精度对某量实施N次观测,获得x1,x2,...,xn。当其中某数据xk所对应的vk能够满足下式,如式(6)所示:

式(6)中,x为观测值算术平均值;σˆ为测量标准差的对应估计量。
此时认为xk内含有粗差,需要将其剔除。
2.实例应用
2.1 近景三维测量系统布设
在实景中对设计的基于关联规则算法的不动产边界三维测量方法进行应用与测试。首先使用近景三维测量系统对不动产边界图像进行捕捉。对近景三维测量系统进行设置与安装,其具体构成(如图2所示):
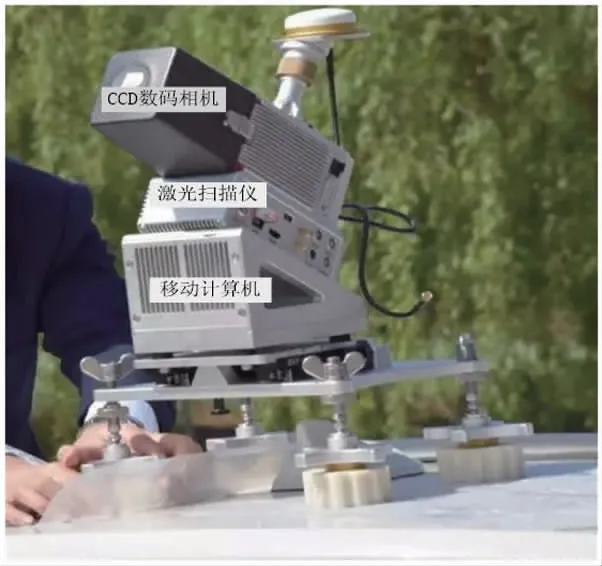
图2 近景三维测量系统具体构成
在实验中,将移动计算机、CCD数码相机、激光扫描仪安装于无人机上,由于该无人机自带全球定位系统,因此不再额外对该系统进行设置。完成近景三维测量系统的布设以后,设置一些飞行扫描站点并对其测量路径进行选择。
2.2 中层不动产建筑侧面测量误差测试
生成实验地区的不动产图像交易数据库,在数据库中选择某区域图像作为实验数据集。
首先对数据集中某中层不动产建筑侧面的边界进行三维测量,调用的侧面数据集图像(如图3所示):

图3 调用的侧面数据集图像
对于单一边界的测量,对扫描不动产边界图像交易数据库中相关图片的次数和产生的频繁项集个数进行调整,对实验方法的单一边界测量误差进行测试。在图像边界三维数据挖掘中,当扫描不动产边界图像交易数据库中相关图片的次数为30次时,分别在产生频繁项集的个数为18、20、22、24、26、28个时对实验建筑侧面的上边长、下边长以及高度进行测量,也就是分别对a、b、c的值进行测量。
此时测量结果具体如下:
产生的频繁项集的个数为18个时,a、b、c的测量值为15.203m、16.901m、11.801m;
产生的频繁项集的个数为20个时,a、b、c的测量值为15.202m、16.903m、11.802m;
产生的频繁项集的个数为22个时,a、b、c的测量值为15.203m、16.904m、11.804m;
产生的频繁项集的个数为24个时,a、b、c的测量值为15.206m、16.906m、11.805m;
产生的频繁项集的个数为26个时,a、b、c的测量值为15.205m、16.907m、11.806m;
产生的频繁项集的个数为28个时,a、b、c的测量值为15.206m、16.908m、11.807m。
a、b、c的实测数据为15.2m、16.9m、11.8m,根据实验方法测量数据和实测数据对每种测量距离的平均测量误差进行计算,具体误差计算结果如下:
产生的频繁项集的个数为18个时平均测量误差为

产生的频繁项集的个数为20个时平均测量误差为

产生的频繁项集的个数为22个时平均测量误差为

产生的频繁项集的个数为24个时平均测量误差为

产生的频繁项集的个数为26个时平均测量误差为

产生的频繁项集的个数为28个时平均测量误差为

接着将扫描不动产边界图像交易数据库中相关图片的次数调整为50次,同样在产生频繁项集的个数为18、20、22、24、26、28个时对a、b、c的值进行测量。
此时测量结果具体如下:
产生频繁项集的个数为18、20、22、24、26、28个时,a、b、c的测量值分别为15.202m、16.902m、11.801m;15.202m、16.903m、11.802m;15.203m、16.903m、11.804m;15.204m、16.905m、11.804m;15.205m、16.905m、11.804m;15.205m、16.906m、11.805m。
计算的平均测量误差(如表1所示):

表1 焦距为19mm时的平均测量误差
综合以上实验结果,扫描不动产边界图像交易数据库中相关图片的次数是50次时,其平均测量误差整体低于扫描30次,证明多次扫描不动产边界图像交易数据库中相关图片能够提升测量精确度。
同时,在产生频繁项集的个数较少的时候,测量结果更接近真实值,而在产生频繁项集的个数变多后,实验中的平均测量误差越来越大。这说明设计方法在产生频繁项集较少时可以进行更加精准地测量。
2.3 低矮不动产建筑顶部测量误差测试
接着针对低矮不动产房屋顶部实施边界三维测量。在实验数据集中选择一片较为低矮的房屋,调用的顶部数据集图像具体(如图4所示):

图4 调用的顶部数据集图像
对其中五个比较低矮的房屋的屋脊实施边界三维测量,如图4中的标记所示。对五个房屋屋脊的平均测量误差进行计算,具体如式(7)所示:

由式(7)计算结果表明:对低矮不动产房屋顶部实施边界三维测量的平均测量误差较低。此次测量误差的计算结果表明,设计的基于关联规则算法的不动产边界三维测量方法适用于多种场景下的不动产边界三维测量,满足了设计需求。
3.结束语
近年来,数字地球和信息化技术的发展,为不动产边界三维测量问题带来了更加广阔的发展空间,该技术对于不动产的修复重建和三维建模均有重大意义。应用关联规则算法对该问题进行研究,主要是利用关联规则算法进行不动产图像边界三维数据的挖掘,实例验证了该算法的应用能够达到较低的测量误差,也证明设计方法可以实现近距离的不动产边界三维测量。今后将针对较远距离的测量精度提升问题进行研究。
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
小学生学习指导(低年级)(2021年9期)2021-10-14 07:57:00
应用数学(2020年2期)2020-06-24 06:02:40
中学生数理化·七年级数学人教版(2019年10期)2019-11-25 07:34:00
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:46
电测与仪表(2015年18期)2015-04-12 00:45:28
卷宗(2014年5期)2014-07-15 07:47:08
雷达学报(2014年4期)2014-04-23 07:43:09
计算机工程(2014年6期)2014-02-28 01:26:12
