
基于无人机低空航摄的典型地质灾害识别研究
——以滑坡、泥石流、崩塌为例
2021-02-10 07:35潘文明王德高
宿州学院学报 2021年12期
潘文明,王德高
安徽工业经济职业技术学院地质与建筑工程学院,安徽合肥,230051
高精度无人机遥感技术随着无人机技术和航空摄像机技术的发展而兴起。全面准确获取灾害点现状、受灾区域面积、位移量和塌方量是地质灾害应急调查的关键难点。传统调查方法要求人员到达地质灾害现场进行一系列的地质调查、变形测量及地质结构调查等,具有难度大、低时效、高风险、高损耗等缺点。对比传统方法,现代无人机航空摄影在地质灾害调查中主要有以下优势:第一,无须人员亲临现场,安全性提高;第二,无人机采用飞行模式,可以到达人难以到达之处,同时时效性较高;第三,无人机可全天候作业;最后,无人机训练使用维护成本低。基于以上优点,无人机在地质灾害调查领域意义重大,所以,针对大规模的滑坡、持续变形的坡体以及大范围的塌陷区,必须引进快速、高效且对山区地形条件有很强适应性的调查技术。
本文利用无人机低空航摄技术获得三维可视化数据,通过解译特定地质灾害的影像特征,结合实地验证,建立典型地质灾害体(滑坡、泥石流和崩塌)快速识别的标志。根据已建立的地质灾害识别标志,分辨山区地质灾害的类型、灾害涉及范围、灾害造成的损失,达到全天候、无盲区提供山区地质灾害区影像数据,为救援提供地质灾害发生区的信息支持,最大程度为减小地质灾害造成的经济损失和人员伤亡,为突发性地质灾害防治工作提供有力的技术支持。
1 无人机低空航摄系统组成
研究中无人机低空航摄系统主要由四个部分组成:无人机飞行平台、机载传感器、地面监控系统和遥感数据处理系统。其功能如图1所示。
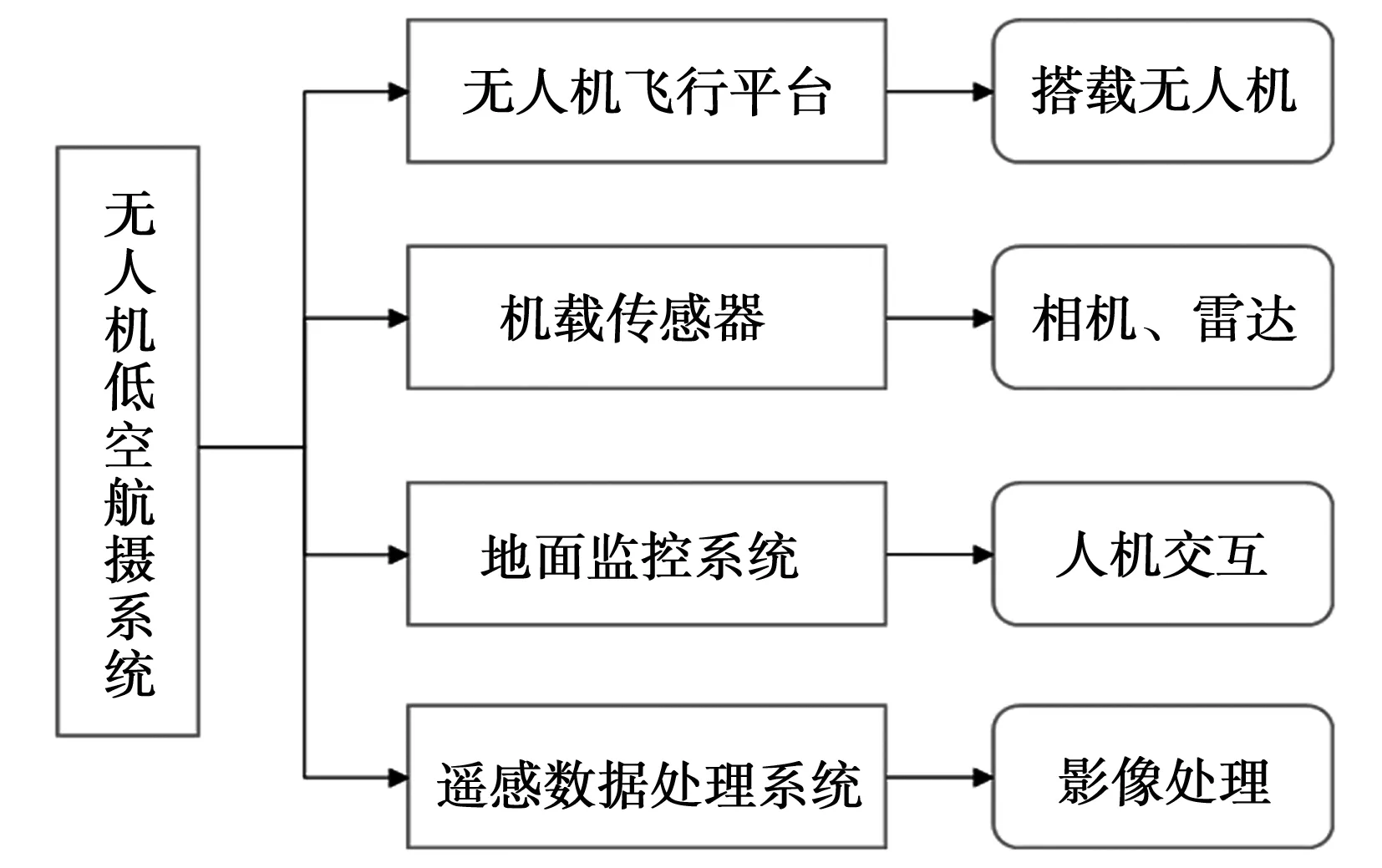
图1 无人机低空航摄系统组成及功能
2 基于无人机低空航摄的山区地质灾害快速识别方法
2.1 山区无人机航摄外业
山区无人机低空航摄外业需要提前做控点布设、航线设计,准备工作完成再进行航摄飞行。飞行结束后,检查本次飞行获取的航片,对于不满足要求的航拍影像,须及时剔除并当场重新补拍。
一般山区的地形地貌复杂,植被覆盖率高。在山区布摄像控点,要结合遥感图像选取相控点,并实地勘察相控点的可行性,勘测航测区域的地质和地貌条件。在设计航线时,为避免山区中树木遮挡或地势遮挡,要提高航向重叠度和旁向重叠度,并提高航行高度。
山区中天气情况复杂,海拔高度、山脉走向、坡向和地形都会影响局部的山区天气,所以需要提前获取气象情况。外业航摄飞行要根据实时天气情况安排飞行的时间和范围。
2.2 航摄内业数据处理流程
首先利用专业数字摄影测量工作站将山区航摄影像制作成数值正射影像图;再测量相邻相对上的相控点,根据相控点的位置关系,生成测区的数字高程模型(DEM);最后仍须进行影像的倾斜误差修正和投影误差修正,输出高精度数字正射影像和高程数字模型。流程如下图2所示。拼接经过修正后的数字影像图,再根据测区范围裁剪出所需的研究区。
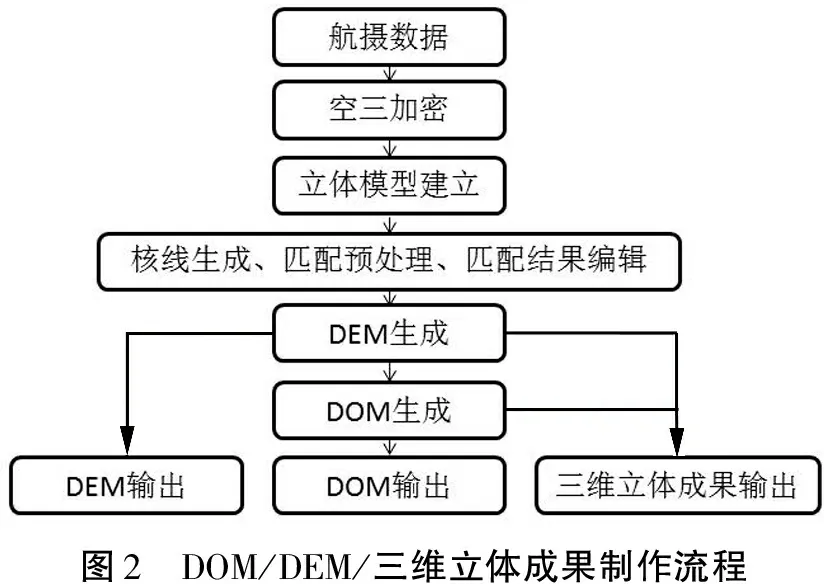
图2 DOM/DEM/三维立体成果制作流程
航空影像处理流程中空三加密利用少量地面控制点,计算航摄影像的外方位元素,加密控制点坐标。空三加密是根据摄像机的参数、控制点文件数据和影像数据,纠正相片中像素在相片坐标系中的位置,纠正航线的偏移量,对纠偏后的航片提取同名像点和控制点进行平差,满足预设条件则可进行成果输出[1]。
2.3 山区地质灾害遥感解译
通过研究和分析山区的航摄影像和山区DEM数据、地质资料,对山区地质灾害个体进行解译。根据无人机航摄获取的DOM和DEM等三位可视化数据,进行内业目视解译,建立目视解译标志,再根据现场验证完成对山区地质灾害解译。
2.3.1 建立解译标志
解译标志是根据航摄图上地物特征建立的地物信息识别体系。必须充分收集山区地面实测资料,综合分析山区各类地物在航摄图像上显示的形状、纹理、色调、尺寸等以及与其关联的地质特征、地貌特点、土壤植被以及人类活动形成的影像特征,进行总结删选,才能最终建立山区无人机航摄图像解译标志。
解译标志分为两大类:直接解译标志和间接解译标志。直接解译标志是指可以直接反映在图像上的一般属性,包括颜色特征、大小、纹理、图像结构等;间接解译标志是指无法直接识别地物,但是可以通过与其关联的其他地物,通过分析确定该地物性质的影像特征,包括线性地物分布、地貌特征、植被分布、人工标志、人类活动痕迹等。本研究针对山区的无人机航摄图像解译标志如表1。
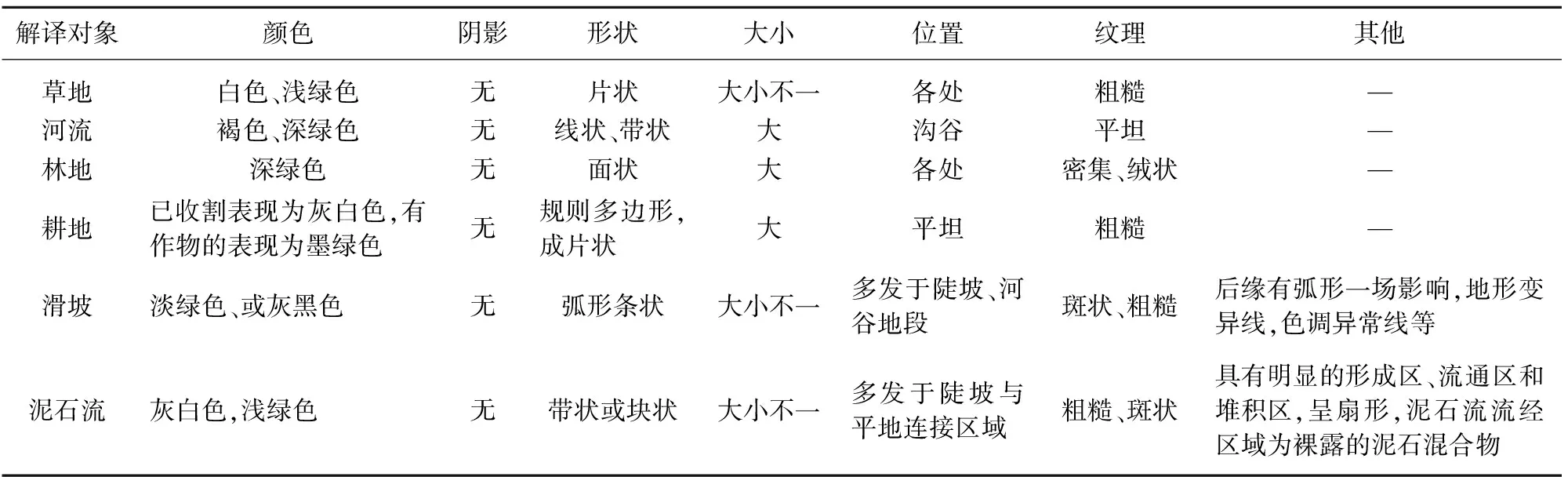
表1 山区目视解译标志
2.3.2 山区地质灾害遥感图像解译
通过综合分析图像的影像特征、图像的空间特征以及其他统计数据推测地物属性,完成山区无人机航摄影像的解译。山区地质灾害个体的颜色、形状、纹理等在图像上的表现与正常山区不同,界限明显。根据航摄影像图上的异常表现定位到可能发生地质灾害的区域,根据已建立的解译标志,初步确定地质灾害发生的类型和范围,随时监测地质灾害发生位置的地质环境条件、地质灾害全貌、局部及周边情况,确定山区地质灾害破译点后,圈定地质灾害分布范围,根据破译点位置信息和范围信息建立解译卡片,最后对解译卡片逐一进行外业复查[2],流程如图3所示。
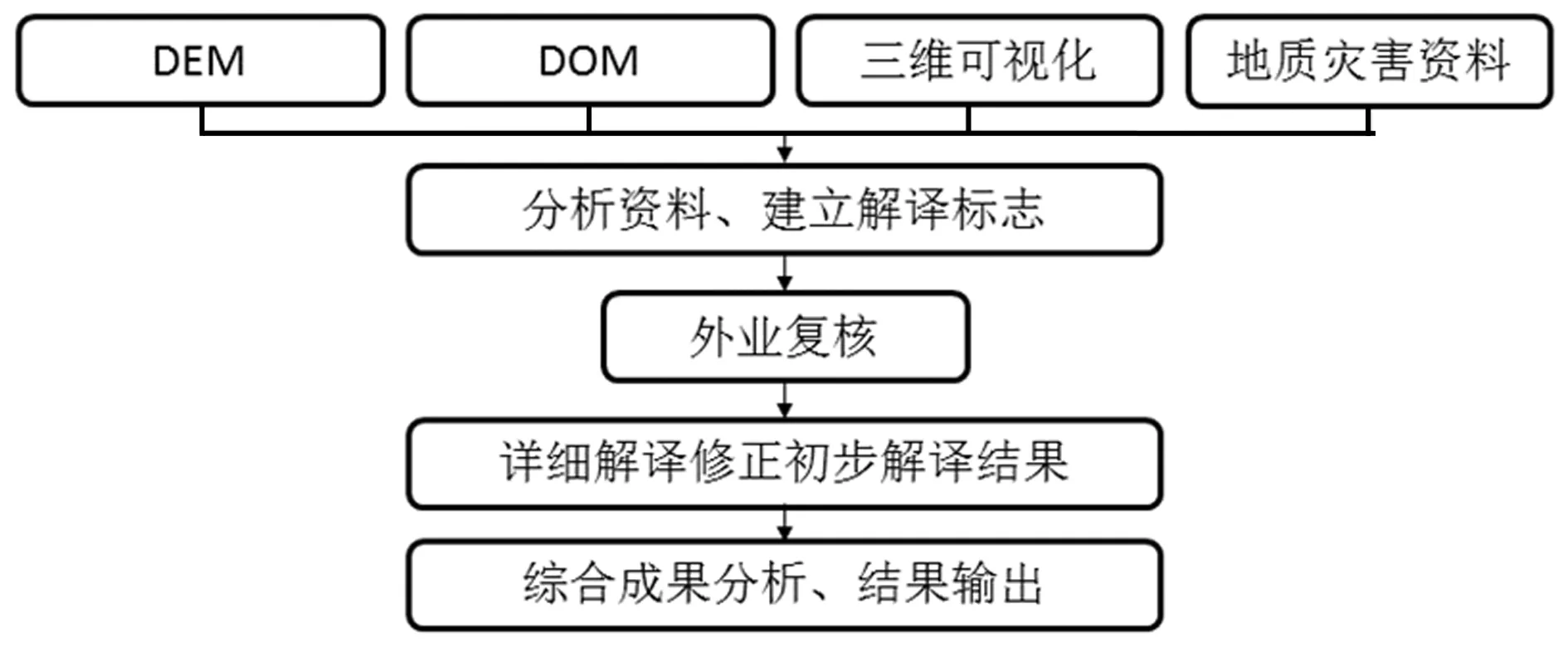
图3 山区地质灾害遥感解译流程图
根据解译成果和外业复合结果,修正解译标志,编制山区的航摄解译图像[3]。
3 应用实例
安徽省皖南山区、大别山区山体地质环境脆弱,岩体结构面组合不利、结构岩层软弱、坡体高峭陡峻,受到雨水侵蚀和人类活动等影响,极易发生崩塌等地质灾害。截至2015年底,安徽省现有地质灾害隐患点4 563个,其中滑坡1 442个,崩塌1 495个,泥石流124个,不稳定1 502处。由此可见,滑坡、泥石流、崩塌地质灾害是安徽省内发生概率较大的地质灾害。由于地质灾害发生存在不可预见性和危险性,本研究也尚处于验证阶段,所以根据1∶5万调查成果初步选择,在众多典型的地质灾害发生点中选择4处已经发生地质灾害的区域(黄山市太平湖镇朝阳村湾里滑坡、安庆市岳西县来榜镇花墩电站滑坡和葫芦河泥石流以及宁国市S215省道洪蜀岭段崩塌点)作为研究对象,验证无人机低空航摄在山区地质灾害应急调查中的可行性。
为了提高无人机观测精度,无人机飞行前提前对灾害发生区域周边布设相控点,再根据已设计好的航线,对灾害区域实施航拍。航片经过内业处理后通过解译获得地质灾害发生点影响范围、受灾情况等信息。根据已编制好的山区遥感影像解译标志,结合无人机低空航摄获取的影像,进行山区地质灾害体的识别,提取山区地质灾害的位置和规模。
3.1 无人机低空航摄
本次研究的飞行平台采用华测固定翼P310测绘无人机,参数如表2所示。

表2 华测固定翼P310测绘无人机
摄像机采用佳能5D Mark Ⅱ单反摄像机,传感器参数如表3。
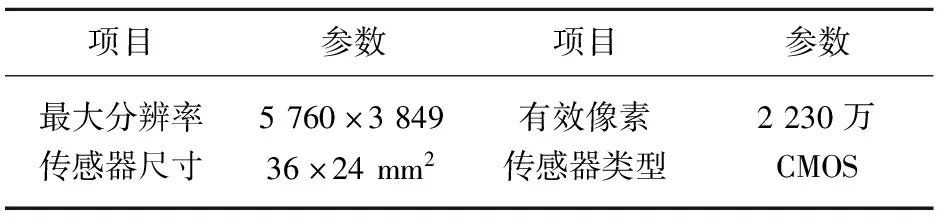
表3 传感器参数
利用无人机获取地面目标的高分辨率多视图影像,用于解译山区的崩滑流地质灾害,为后期摄影测量、三维可视化模型制作提供基础数据。由于研究区地形以山地为主,地形起伏,高植被覆盖率,为了保证数据的质量,本次飞行高度设为200 m,航线密度根据实际情况进行加密处理,同时提高航向重叠率和旁向重叠度,在此次飞行中设为70%以上[4]。
3.2 像控测量
由于山区地表植被覆盖率高,地面标志物较少,所以需要提前做好控制点标志,再由无人机航拍,其中相控点采用GPS-RTK测量放样。根据测区地形起伏,各研究区分别设置5个相控点和5个检查点,点位均匀分布于测区内。
3.3 影像数据内业处理
利用VirtuoZo摄影测量工作站制作和输出测区的数字高程模型(DEM)、数字正射影像图(DOM),再将生成的数据导入Smart 3D capture,生成三维可视化场景[5]。再根据DATMatrix软件解析空三控制点平差结果,其中图形的平面控制点中误差小于1.4 m,高程中误差小于1.0 m。精度符合《1∶1 000地形图航空摄影测量内业规范(GB/T 7930-2008)》对1∶1 000航测成果图加密成果的限差要求。
3.4 地质灾害监测分析
本次研究根据已编制好的山区遥感影像解译标志,结合无人机低空航摄获取的影像,进行山区地质灾害体(滑坡、泥石流和崩塌)的识别,提取山区地质灾害的位置和规模。
3.4.1 滑坡解译
解译研究区内的滑坡过程中发现,滑坡灾害位置主要分布在角度30°以上的斜坡,滑坡处植被覆盖率低,滑坡处纹理、色调与周围环境不同,有陡峭的山脊和地形变异线等特征,具有一定规律性(图4)。根据航摄图像量测滑坡的长度、宽度、滑动方向和影响范围,结合实地验证,提高解译的可靠性[6]。

图4 湾里滑坡
研究区域典型的滑坡如湾里滑坡、来榜镇花墩电厂滑坡(如图5),其中湾里滑坡分布高程62~117 m。滑坡长90 m,宽80 m,坡高45 m,体积约12 600 m3。最早于1997年前缘发生小规模崩滑,2009年出现整体滑移变形迹象,后缘拉裂缝长70 m、宽0.2 m。来榜镇花墩电站滑坡位于来榜镇,滑坡后缘为耕地及林地,中部为茶园及电站蓄水池,前缘为花墩电站、居民点及林地。滑坡区的植被覆盖率约为80%,山体滑坡在1969年7月14日首次出现后,1991年7月1日再次出现滑动迹象,表现为局部失稳变形,距坡体前缘约3.8 m处,出现拉张裂缝长3.8 m,宽约0.2~0.3 m,呈直线状。在航摄图像上滑坡体呈浅色与周围绿色植被差别较大,滑坡体附近水土流失,呈条带状,特征明显。

图5 来榜镇花墩电厂滑坡
3.4.2 泥石流解译
根据遥感图像解译和实地考察发现[7-10],山区泥石流多发生在高差较大的陡坡附近,泥石流发生区域形态呈扇形,泥石流经过区域有明显的分区,主要分为发生区、流通区和堆积区,泥石流流经区域为裸露的泥石混合物,并且没有植被生长,在航摄图上泥石流发生区域颜色为灰白色、纹理与周围环境有明显界限。
本区以典型的岳西葫芦河泥石流为例(图6),泥石流物源内主要为林地,植被覆盖率约80%;流通区途经318国道;堆积区有村庄居民及废弃学校,主要为耕地和村庄。泥石流初次发生于1969年,2002年雨季再次发生,由沟拐弯处冲出沟外。根据现场踏勘情况,泥石流类型为水石流。航摄图上显示,泥石流床颜色为灰白色,泥石流源头颜色色调不一,没有生长或仅只有少量灌木生长。泥石流涉及区域,图像纹理、颜色与周围植被形成对比,长度1 500 m左右,宽度20 m,呈条带状。

图6 岳西葫芦河泥石流
3.4.3 崩塌解译
崩塌地质灾害发生区域多为边坡角度大于40°的山体,崩塌地质灾害的产生多是由于人类活动,例如山区道路建造过程中边坡的切割等,无人机航片中通过图像中颜色、纹理结合地貌进行解译,一般崩塌发生地点能够明显观测到崩塌的轮廓线。
研究区的典型崩塌地质灾害点宁国市境内蜀洪岭地质崩塌区,如图7所示,地质灾害发生时间为2011年1月10日,发生崩塌的地质灾害点位于S215省道蜀洪岭路段,道路两侧均为山体,山体海拔在300~900 m,山势险要,发生崩塌山体靠近省道一段边坡坡率为1∶0.5左右。首次发生崩塌的时间为2011年,根据现场勘测情况,崩塌的轮廓线为半圆形,崩塌区域长约70多米、纵深约100 m,崩塌造成了约10 000 m2的岩体裸露,崩塌石方量约40 000 m3。根据航测图可见,发生崩塌山体附近边坡由于人为修路切坡,形成裸露陡崖,受到长期风化侵蚀,造成崩塌。根据图7可以看出,发生崩塌的山体岩壁呈浅色,接近灰白,岩壁周围没有植被生长,崩塌碎石覆盖区域长期没有高大植物生长,航拍图像上可以明显看到崩塌影响范围与周边的界限。

图7 宁国市蜀洪岭崩塌点
4 结 论
高精度无人机遥感技术可以清晰分辨山区的地物,通过低空航摄图像获得的DOM、DEM、三维立体图像,快速解译获得山区地质灾害位置、规模、影响范围、分析灾害发展趋势等。根据无人机低空航摄技术在皖南山区四个典型地质灾害点的验证试验可知,无人机航摄技术可以准确识别山区地质灾害发生的位置和影响范围,证实了低空无人机航摄技术在山区地质灾害快速识别方法具有可行性。
基于无人机的低空航摄技术可以为山区地质灾害监测和救援提供可靠的海量的高清影像和三维可视化数据,为地质灾害的调查评估提供参考。在验证无人机山区地质灾害识别的基础上,结合无人机在紧急事件发生的情况下快速响应、快速抵达地质灾害发生点、实施山区地质灾害监测工作的特点,无人机适用于低空航摄的山区地质灾害调查。在实际地质灾害应急调查中无人机飞抵地质灾害发生点后,传回现场影像,经过内业处理和影像拼接,获得灾害发生区域的三维可视化数据,可为抢险救灾提供信息支持。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
当代陕西(2020年17期)2020-10-28
艺术品鉴(2019年12期)2020-01-18
杂文月刊(2018年21期)2019-01-05
小太阳画报(2018年7期)2018-05-14
北京航空航天大学学报(2017年9期)2017-12-18
海峡姐妹(2017年6期)2017-06-24
环球时报(2017-06-14)2017-06-14
南方文学(2016年3期)2016-06-12
兵器知识(2016年2期)2016-01-29
