
基于上位机的永磁同步电动机伺服控制系统设计
2021-02-10 08:15林建洪
宿州学院学报 2021年12期
林建洪
1.莆田学院机电工程学院,福建莆田,351100;2.福建省激光精密加工工程技术研究中心,福建莆田,351100
因永磁同步电机(PMSM)具有功率密度高、体积小、起动转矩大等优点,目前被广泛应用于数控机床、机器人及航空等领域中[1-2]。伴随着交流伺服控制技术的发展,基于矢量控制的永磁同步电动机伺服系统具有良好的控制性能,并且以比例-积分(PI)控制器结构简单、鲁棒性好而被广泛应用[3]。在永磁同步电机伺服控制系统中通常采用试凑法整定PI的控制器参数,该方法虽然简单实用,但当被控制对象的参数变化时,须重新修正源程序中的PI控制参数。而在实际生产和应用中为了提高生产效率,不仅要求伺服控制系统能够稳定可靠运行,还须对系统的运行状况和数据实时在线更新和存储。为此,一些学者对基于上位机的伺服系统驱动控制进行了研究。如刘浩等[4]介绍一种基于串口通信向DSP在线烧写程序的方法,描述了在线烧写的基本思想和实现步骤;龚寄等[5]介绍基于VC++的永磁同步电机控制器上位机程序,利用Windows API读写串口函数,通过定时器响应接收数据;任志斌等[6]介绍了矢量控制在永磁同步电机伺服控制中的应用,但系统测试较为复杂;陈震等[7]设计了一种基于LabVIEW的PMSM参数识别系统,该系统只用于自动测量定子电阻、电感和转动惯量等相关电机参数。为了进一步扩展伺服系统驱动控制研究,文本以DSP TMS320F2808为主控芯片,利用Visual Basic 6.0软件设计了一种基于上位机的永磁同步电机伺服控制系统,并通过实验验证了方案的有效性。
1 永磁同步电机矢量控制原理
PMSM在dq坐标系中的数学模型包括以下方程:
(1)
(2)
将式(2)代入式(1)中进一步得:
(3)
电磁转矩方程:
(4)
电机的运动方程:
(5)
式中,Rs为定子电阻;usd,usq为dq轴电压;isd,isq为dq轴电流;Ld,Lq为dq轴电感;ωr为转子电角速度;ωm为转子机械角速度;ψfs为等效的转子磁链;pn为电机极对数;Jm为电机的转动惯量;Bm为摩擦粘滞系数;TL为负载转矩。
矢量控制的基本原理是按照直流电机转矩的控制规律来实现对永磁同步电机的转矩控制,即通过坐标变换将定子电流分解为转矩电流分量和励磁电流分量,并加以分别控制,最终实现有效的转矩控制。本文采用id=0的矢量控制策略,对于隐极式的永磁同步电机,单位定子电流能得到最大的转矩,而且铜耗较低。其系统控制框图如图1所示。

图1 伺服系统的矢量控制系统框图
2 系统整体设计方案
设计伺服控制系统包括上位机控制系统、硬件控制平台和软件程序控制3大部分,其总体设计如图2所示。下位机以DSP TMS320F2808控制芯片为基础,通过RS232通信模块实现与上位机计算机的通讯,并结合多种外围控制电路,构成一套控制简单功能完善的电机驱动系统。
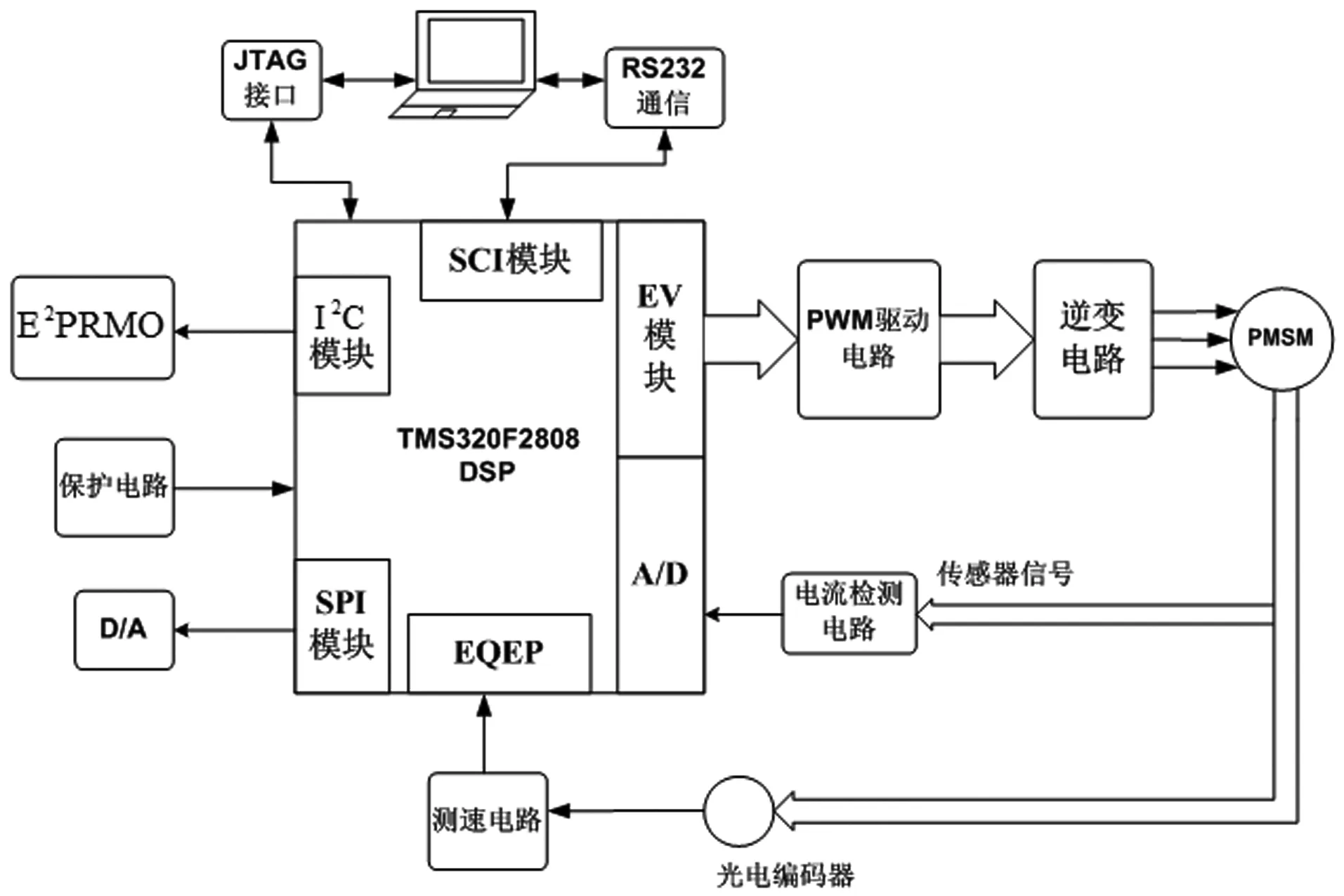
图2 系统的总体设计框图
硬件平台包括伺服电机、主电路和外围控制电路等主要部分。主电路中功率开关管采用MOSFET IRF540N,其额定电流为23 A,额定电压为100 V。定子两相绕组电流ia、ib,母线电流iDC的采样选用霍尔电流传感器CS020G,其原边电流测量范围为-40~+40 A,对应副边电压的输出范围为-1 V~+1 V。
交流伺服电机型号为ASM370,其额定功率为370 W,额定电压为48 V,额定转速为3 000 r/min。为了带载实验,本文选取一个额定功率为300 W、额定转速为3 000 r/min的两相步进电机作为负载。
外围电路由MOSFET驱动电路、脉冲输入接口电路、过流故障信号检测、A/D调理、D/A转换电路以及RS232通信等模块构成。
3 上位机控制系统设计
简单易用的操作窗口是人机界面的重要设计原则。本文以Visual Basic 6.0软件开发平台为基础,设计了一种永磁同步电机上位机控制系统界面,主要包括按钮模块、波形显示模块、辅助控件模块等。控制系统界面的主要作用是便于开发人员实时发送电机控制参数,并且能接收DSP发送的相关数据,进而处理保存并显示相应的数据波形。所需设计的窗体为控制界面和参数设置界面,如图3所示。
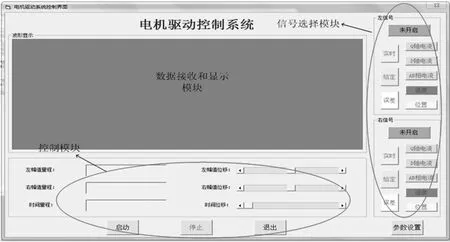
图3 电机上位机驱动系统界面
电机驱动控制界面主要为3个模块:信号选择模块、数据接收和显示模块以及控制按钮。
信号选择模块能同时实现多通道信号传输,并实现不同信号给定值、实际值以及误差值的图形显示。数据接收和显示模块主要是接收DSP的实际信号,完成相关数据的处理转换,并实现数据保存和波形显示。为提高显示波形清晰度,可设置相应数据量程,并通过一个相应滑块实现连续调节。控制按钮主要实现电机控制系统的启停和参数设置。
参数设置界面主要包括三环控制参数设置和串口参数设置窗口两部分,如图4所示。三环控制参数设置的功能是设定参数,包括给定信号的类型、幅值和周期的设定,以及相应调节器的PI参数整定。串口参数设置窗口主要完成串口参数的初始化,即串口通道的选择、数据帧格式的设置以及波特率的设定。同时为使通信正常,上位机的串口参数设置须和下位机的相应参数设置保持一致。
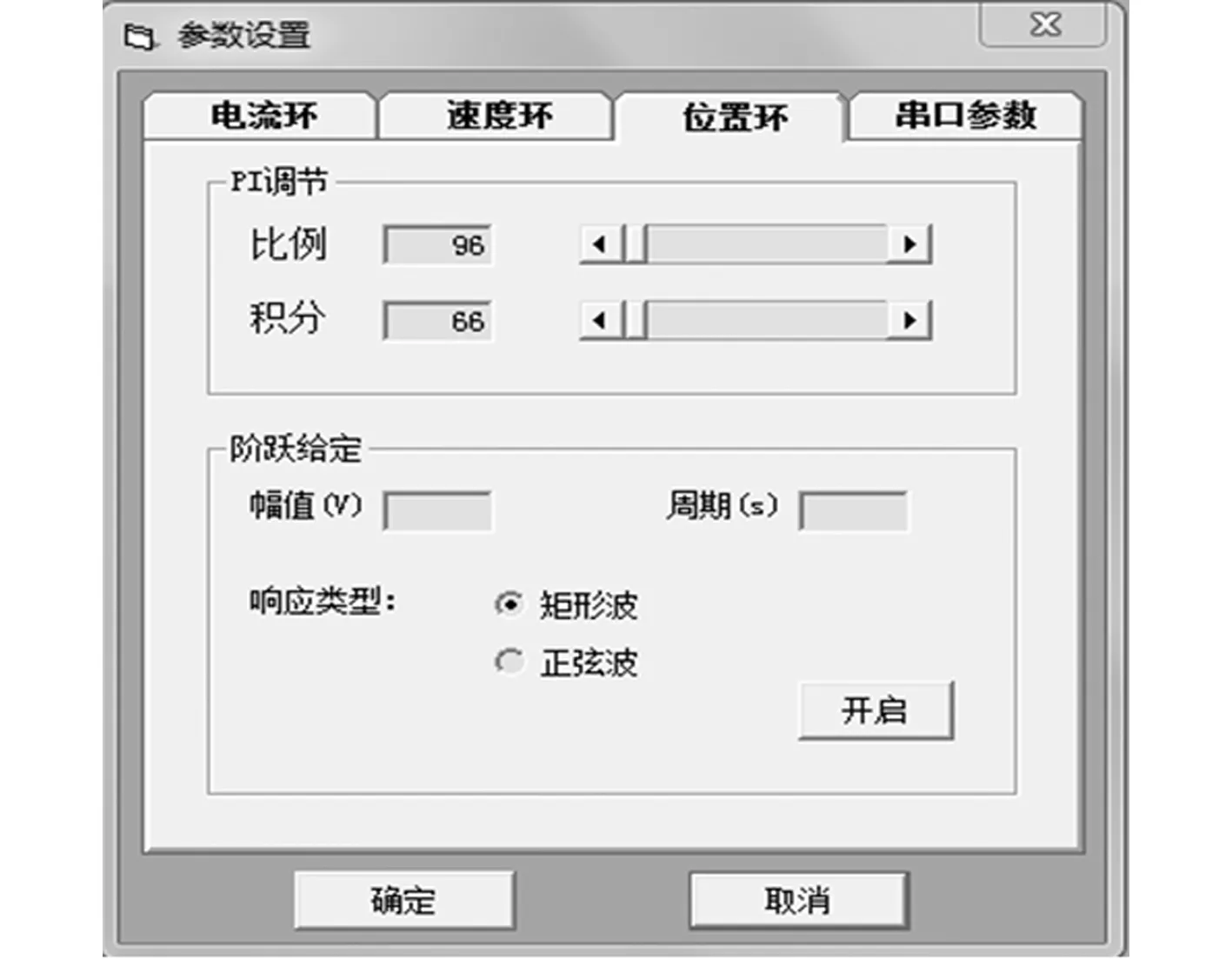
图4 参数设置界面
4 系统软件设计
4.1 上位机软件设计
上位机采用VB提供的MSComm串行通信控件,通过图形化编程,实现了DSP计算机之间的通讯。MSComm控件实现通讯有查询法和事件驱动两种方式。考虑控制的实时性,本文采用事件驱动方式,事件驱动通常当事件通知条件满足时,自动触发OnComm事件,进而利用事件过程中的代码对通讯数据进行处理。上位机接收和发送模块的程序流程图如图5所示。

图5 上位机软件流程图
4.2 下位机软件设计
下位机DSP程序软件包括主程序和AD中断服务子程序两部分。系统的控制周期为50μs,采用ePWM事件下溢触发AD转换,然后进入周期中断,实现对采样信号进行处理从而得出新的PWM控制信号。软件流程图如图6所示。

图6 下位机软件流程图
5 实验验证
采用上述设计的上位机电机驱动控制系统测试电机的显示功能和运行状态,电机的实验参数如表1所示。电流调节器参数:比例系数为0.96,积分系数为0.066。速度调节器参数:比例系数为0.03,积分系数为0.000 1。位置调节器参数:比例系数为1.2,积分系数为0.000 015。测试结果如图7—图9所示。由波形图可以看出,本文设计的上位机电机驱动控制系统在电流、速度和位置跟踪稳定方面表现出良好的鲁棒性,因此表明本文所设计的基于上位机的永磁同步电动机伺服控制系统的有效性。
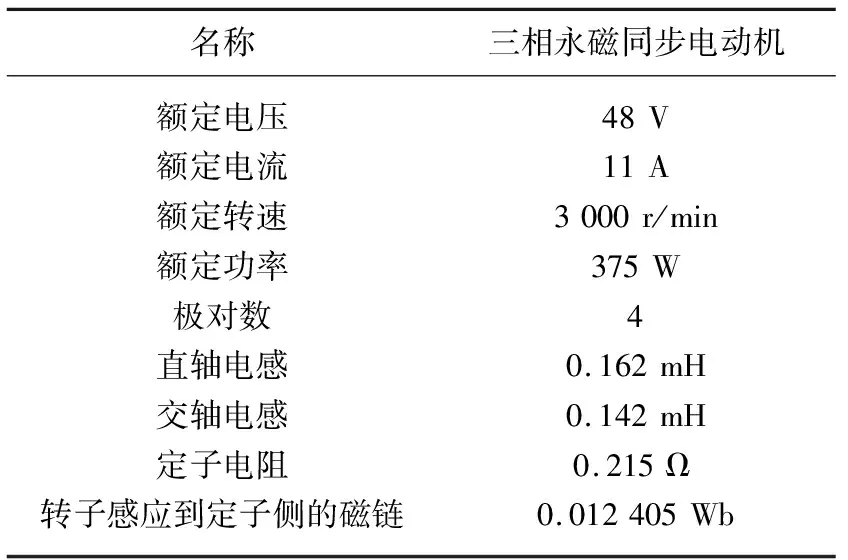
表1 电机参数
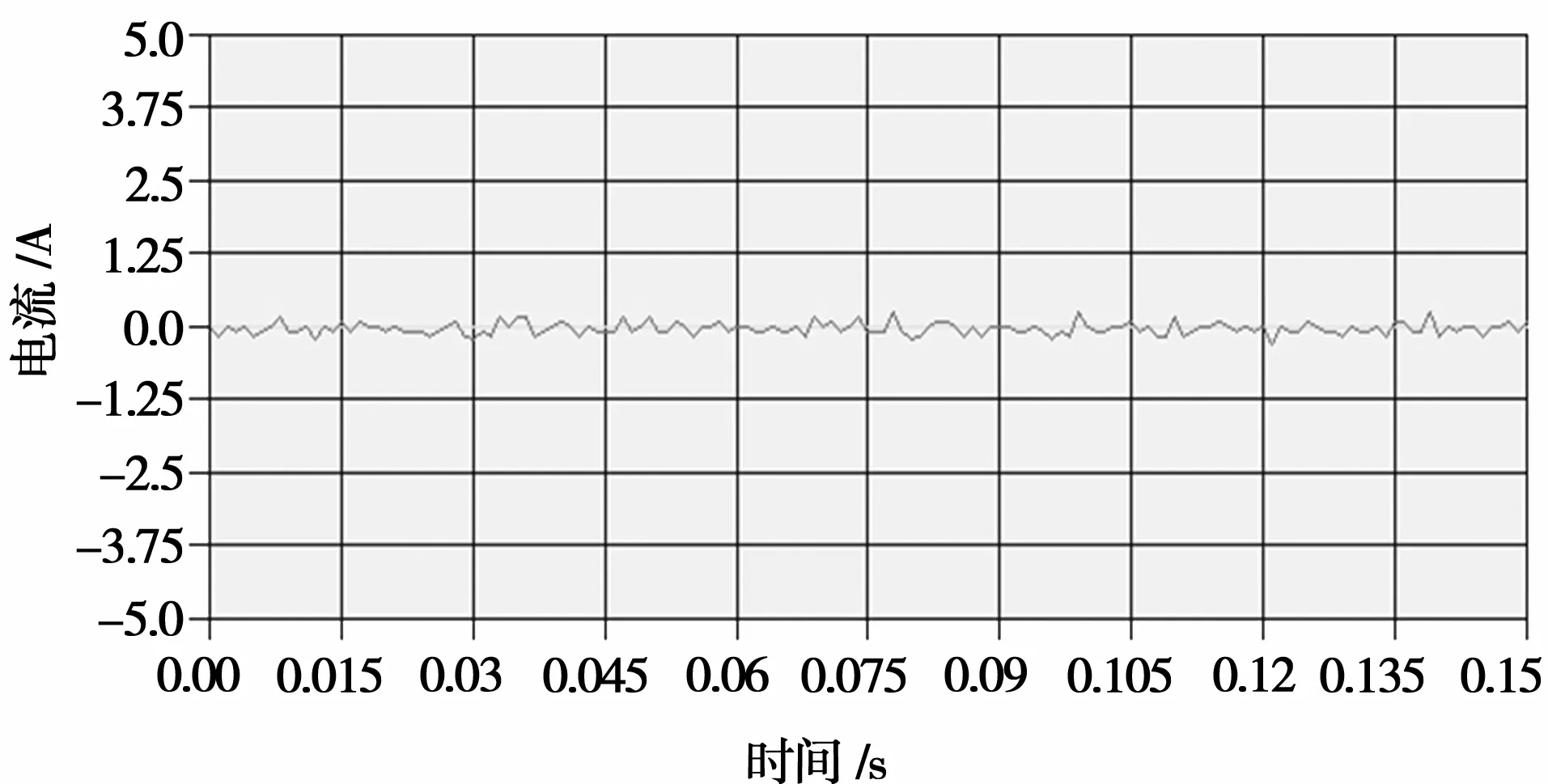
图7 d轴电流

图8 速度给定值与反馈值
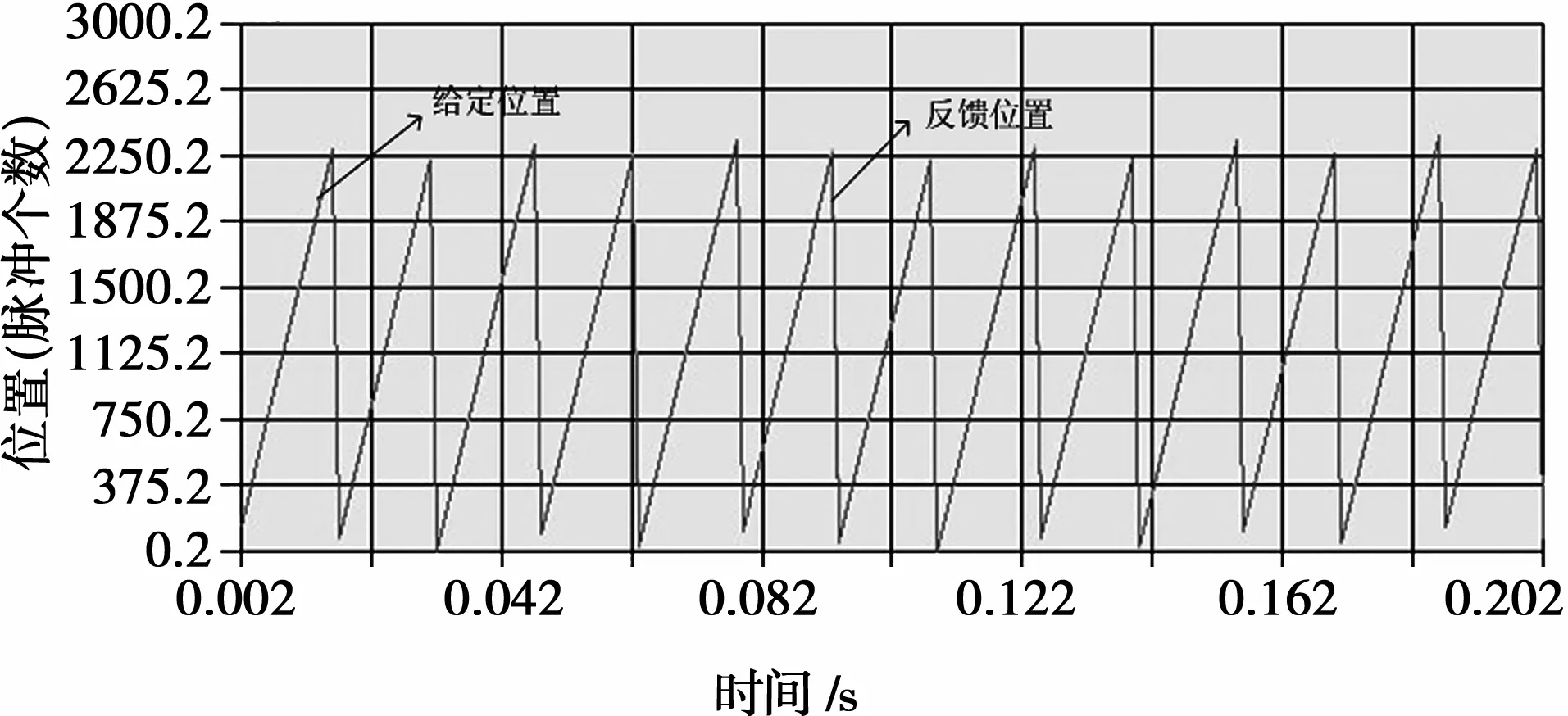
图9 位置给定与反馈值
6 结 论
本文设计了一种基于VB的多功能上位机的永磁同步电机伺服控制系统,通过串行通信功能实现DSP与PC机之间良好的人机界面控制。通过实验结果表明,设计的硬件系统可靠稳定,上位机控制系统能实时修改参数、存储以及波形显示,极大缩短了系统开发周期。本系统为电机的控制研究提供了一个有效的开发应用平台,具有一定的应用价值。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
车迷(2018年12期)2018-07-26
科技与创新(2017年3期)2017-03-17
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
电脑知识与技术(2016年22期)2016-10-31
科技与创新(2015年23期)2015-12-08
农业科技与装备(2014年11期)2015-02-02
