
基于STC12单片机的智能垃圾桶的设计
2021-02-07 11:13杨伟兵陈亚丽
无线互联科技 2021年22期
杨伟兵 陈亚丽
摘 要:文章研究的智能垃圾桶采用STC12单片机作为控制器,舵机作为驱动器,采用显示屏显示分类提示图案,超声波传感器检测投放者靠近垃圾桶距离,语音模块播放提示语音,舵机驱动桶盖自动开启与关闭。本设计实现了垃圾的正确投放,提高了垃圾分类时效性。
关键词:智能;垃圾桶;语音模块
0 引言
随着经济发展,城市产生的生活和工业垃圾急剧增加。虽然大部分垃圾会得到卫生填埋、焚烧等无公害处理,但也有些垃圾会释放有害气体,导致大气质量下降。如废旧电池、节能灯等有害垃圾,不分类处理不仅会污染土壤资源,还会危害人体健康。目前,城市垃圾分类现状及主要问题是:垃圾分类管理不完善;垃圾收集处理方式落后;居民垃圾分类意识薄;缺乏监管和约束。
在一些大城市的街道和生活区垃圾桶有四分类。但大部分城市采取的是两分类型:可回收桶和不可回收桶。两分类垃圾桶辨识虽然比例较高,但其效果并不明显。民众对于垃圾的正确处理意识较为薄弱,在行为上没能自觉参与到环境保护中。垃圾分类要依赖居民的素质和自觉性,但素养的提高是一个长期过程。本文提出在提高居民素质和加强宣传的同时,采用智能垃圾桶,提高垃圾分类时效。
1 设计思路
本设计的智能化垃圾桶,考慮智能垃圾桶的成本符合中小城市经济承受力。在普通垃圾桶上加装经济实用的驱动垃圾桶翻盖的机械部件,智能垃圾桶主要有语音和智能指示和自动翻盖功能。用单片机做控制单元,价格便宜,不会造成智能垃圾桶的高成本。用超声波传感器检测人靠近垃圾桶的距离,发出分类提示语音。语音可以设计为:“请分类文明投放”。目前的垃圾桶分类提示字都在桶的侧面,对于匆忙赶路和不自觉的人,不会仔细看侧面提示。本研究在桶盖上方设计分类显示屏,每个分类桶上面显示屏用代表性图案,回收利用和有害垃圾的简单漫画。城市居民素质培养应该从孩子开始,本研究用精美图案和语音吸引孩子,对没有分类意识的成年人进行提醒。
2 系统工作原理
2.1 系统设计方案
本设计的智能垃圾桶,采用超声波传感器检测前方是否有投放者,采用STC12单片机作为控制器,显示屏显示提示图案。舵机作为驱动器驱动桶盖,采用语音提示,桶盖只有在语音提示后,投放者确定垃圾所投放的桶,超声波传感器检测到人进一步靠近,桶盖打开,投放者投放,离开投放检测距离,桶盖合上。通过图案提示、语音提示、桶盖自动开关,从而实现垃圾的正确投放,提高垃圾分类时效性。系统主要构成如图1所示。单片机输出口与显示屏模块的输入口连接。两分类桶上方安装的检测投放者靠近的超声波传感器模块1和超声波传感器模块2的输出口与单片机单元的输入I/O口连接,单片机单元的输出I/O口与语音模块的输入口连接;单片机单元的输出I/O口与舵机模块的输入口连接。
智能垃圾桶工作,两分类桶显示屏分别显示代表性图案。若前方有投放者,则超声波传感器1将信号传递给单片机单元,单片机输出信号。投放者确定所投放的分类桶,走近分类桶,超声波传感器将信号传递给单片机,单片机输出信号,舵机工作,垃圾桶盖打开,投放者离开检测范围,桶盖自动关闭。
2.2 系统所用元件
本系统由STC12单片机做控制单元,电源模块为5号干电池,语音模块为ISD1720,显示屏模块为12864LCD液晶显示屏,舵机为MG995。单片机采用STC12单片机作为主控单元。STC单片机是高速、低功耗、超强抗干扰的新一代8051单片机。其指令代码完全兼容传统8051单片机,但速度比传统8051单片机快8~12倍是国产单片机中性能较好的单片机。
HC-SR04超声波传感器电路包括超声波发射器、超声波接收器、超声波控制器。图1中包括:(1)U2,U3超声波传感器工作电压为5 V;(2)VCC接电源正极;(3)GND接电源负极;(4)Trig是传感器触发信号输入引脚;(5)Echo是传感器测距数据输出引脚。HC-SR04超声波模块性能稳定、测量距离精确、模块精度高、盲区小,主要用于液位检测、物体距离检测、公共安防检测。
本设计中采用MG995舵机控制电机转动,驱动垃圾桶盖开与关。舵机控制电路模块对外三根线,VCC接电源正,GND接电源负,另一端为信号线接收单片机输出的PWM信号。电机带动齿轮组,驱动舵盘位置在0°~180°之间线性变化,转动不同位置。舵机内部的基准电路会产生相应的基准信号,舵机控制电路中的比较器将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
本设计中的ISD1720语音模块可录放音10万次,存储内容可以断电保留100年,可处理多达255段信息,语音模块音质好,应用灵活,价格低。
2.3 系统软件设计
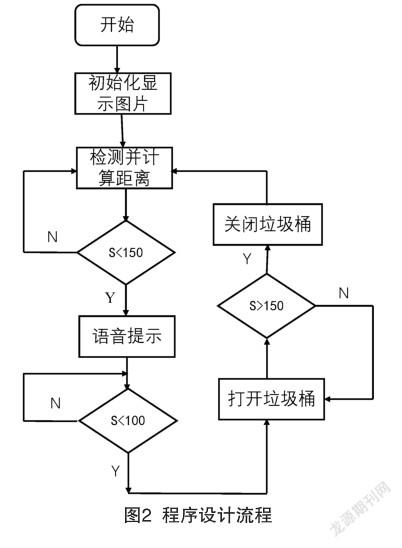
主程序流程如图2所示。程序初始为各个引脚IO初始化,单片机相应外设功能初始化;初始化完成,显示屏显示分类提示图案。当垃圾桶前方有投放者,距离小于150 cm,语音模块工作,发出语音:“请分类投放,谢谢!”。投放者继续走近,单片机接收超声波传感器信号,程序计算距离。当距离小于100 cm时,舵机模块工作,垃圾桶盖打开。投放者投放结束离开,程序计算距离,当距离大于150 cm,垃圾桶盖关闭。
3 系统仿真
为了验证设计电路是否可行,采用PROTEUS 软件进行仿真实验。仿真电路如图1所示,程序输入单片机后进行仿真。在仿真电路中,U2为不可回收垃圾桶超声波传感器;U3为可回收垃圾桶超声波传感器;P2为不可回收垃圾桶舵机;P3为可回收垃圾桶舵机;LS1为声音播放模块。

仿真时,第一步,先设定U3超声波传感器检测距离大于150 mm,U2超声波检测距离为小于150 mm的数值,可设为130 mm,这是会看到语音模块工作;再设定U2超声波传感器检测距离大于150 mm,U3超声波检测距离为小于150 mm的数值,可设为130 mm,同样会看到语音模块工作;证明当人走进垃圾桶接近150 mm,语音提示电路可行。第二步,先设定U3超声波传感器检测距离大于150 mm,U2超声波检测距离为小于100 mm的数值,可设为80 mm,这是会看到P2工作;再设定U2超声波传感器检测距离大于150 mm,U3超声波检测距离为小于150 mm的数值,可设为80 mm,这是会看到P3工作,证明控制电路可行。第三步,设定U2,U3超声波传感器检测距离都大于150 mm,语音模块与P2,P3都停止工作。本仿真證明了本设计的智能垃圾桶电路可行性。
4 结语
本文设计的智能垃圾桶,使用STC12单片机作为主控芯片,采用超声波传感器检测有无投放者靠近,舵机自动打开分类垃圾桶盖。本文设计的智能垃圾桶具有图案提示和语音提示功能。在城市居民分类习惯没有形成的情况下,本系统提高了垃圾分类的时效性。
[参考文献]
[1]马新玲,郭兆阳,乐祺中,等.多种识别方式组合的智能分类垃圾桶[J].机械与电子,2020(12):33-36.
[2]白桂峰.基于STC89C52 的家用智能垃圾桶设计[J].自动化与仪表,2019(3):97-100.
[3]康庄,杨杰,郭濠奇.基于机器视觉的垃圾自动分类系统设计[J].浙江大学学报,2020(7):1272-1276.
[4]赵今越,马良,刘勇.垃圾分类收运路径问题的新型混合蚁群算法求解[J].计算机应用研究,2020(4):54-55.
(编辑 姚 鑫)
Design of a smart trash based on single chip microcomputer
Yang Weibing, Chen Yali(Department of Electrical and Electronics Engineering, Luohe Vocational Technology College, Luohe 462000, China)
Abstract:The intelligent trash can of the paper designs adopted The STC12 single chip microcomputer. steering gear as the driver. using the display screen to display the pattern of classification prompt, adopted the ultrasonic sensor to detect the distance between the thrower and the trash can, the voice module played the prompt voice, The steering gear dried the barrel cover to open and close automatically. This designs realized the disposal of garbage correctly, improved the timeliness of garbage classification.
Key words:intelligent; trash can; voice module
猜你喜欢
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
表面工程与再制造(2019年6期)2019-08-24
小学科学(学生版)(2019年5期)2019-05-21
