
基于功率下垂特性的直流微电网分布式控制
2021-02-05 09:52
电气传动 2021年3期
(上海电力大学电气工程学院,上海 200090)
随着分布式能源的发展,微电网作为一种有效整合可再生能源和负载的解决方案,得到了广泛的应用[1]。由于微电网具备不同的直流源和直流负载(光伏电池、燃料电池、电动汽车和LED照明等),与交流微电网相比,直流微电网被认为是一种有效的解决方法。直流微电网中,各种电气元件都可以在无中间交流变换器的情况下与直流电源变换器直接相连,不存在谐波电流、相位同步和无功功率等问题;同时DC-DC还具有效率高、可靠性高和控制简单等优点,使得直流微电网的发展势在必行[2-3]。直流微电网控制方法主要有集中式控制和分布式控制[4],近年来,为了更有效地控制直流微电网,基于集中式控制和分布式控制,提出了混合式分层控制方法[5-6],这些控制方法旨在提高直流微电网的可靠运行和电压调节能力。其中,集中控制方法使用一个中央控制器对系统内各单元进行监视、控制和预测等,结构相对简单,易于实现,这种基于强通信的控制方式主要应用于大容量的直流微电网;分布式控制多通过代理方式,各单元通过与临近单元弱通信进行协调控制,具有通信系统成本低、单点故障风险低等优点,主要应用于容量较小的直流微电网;混合式分层控制则集成了上述两种方法的优点,主要应用于多母线直流微电网和微电网群中,是未来直流微电网控制运行体系重要的理论研究和技术发展方向。直流微电网中,下垂控制通常用于实现对各源的协同控制,因而被广泛地讨论与研究[7-8]。下垂控制是一种分散式控制方法,下垂控制器通常应用于不考虑线路阻抗影响的小区域直流系统,而在低压直流微电网中,线路阻抗值相对较大,使得负载功率很难在各个分布式电源之间均分,且直流母线电压远低于其额定值。为此,国内外研究学者在传统下垂控制的基础上,提出了多种新型的控制方法。
文献[9]通过引入虚拟阻抗来降低负载功率分配的误差,控制中还增加了电压偏移环节来调节电压的变化,但是该方法没有考虑微源间带有本地负载的情况。文献[10]提出了一种集中式二次控制方法,微电网中央控制器利用低速通信网络对直流母线电压进行实时性采样,实现二次控制方案,使直流母线电压恢复。但是此集中式二次控制中,单点故障及线路阻抗的影响还没有被完全考虑;同时,只有采用较大的下垂系数才能实现负载功率分配精度的提高。为了解决这一问题,文献[1,11]提出了一种基于低速通信的直流微电网分布式控制,通过传输各源的输出电压、电流共享比例等信息,实现负载功率精确共享,保证直流母线电压稳定,该方法虽然考虑了线路阻抗来分担负载功率,但由于没有考虑负载变化引起的电压偏移,当负载发生变化时,功率分配也不能精确实现。为此,文献[12]根据分布式电源的额定功率和瞬时功率引入了考虑线路阻抗的电压偏移法,此方法具有较好的功率均衡分配机制,不足之处在于没有考虑虚拟阻抗引起的输出电压降,直流母线电压没有被有效地调节到其额定电压。
虽然已有研究从不同角度提出了各种方法,但仍无法有效地解决传统下垂控制功率均分与电压质量之间的固有矛盾[13]。为此,本文提出了一种功率下垂控制方法,采用低速通信网络共享微源间的信息,直接通过控制各微源输出电压和输出功率标幺值,在不调整变换器下垂控制系数的情况下最优地实现功率比例分配和改善直流母线电压偏移。同时考虑了本地负载的影响,化简含线路阻抗、公共负载和本地负载三者之间的阻抗网络模型。最后,对所提控制方法进行仿真验证。
1 下垂控制策略
1.1 理想状态的下垂特性
直流微电网通常由分布式电源、储能装置、直流变换器及负载组成,其运行模式有并网运行和孤岛运行两种。并网运行模式下,直流微电网通过双向DC-AC变换器和外部交流大电网互联进行能量的传输;孤岛运行模式下,微电网解列为一个自治的电力系统独立运行,向其区域内负载供电,储能装置用于平衡系统功率。本文所提控制方法对孤岛运行的直流微电网进行重点分析,设计了直流微电网的简化结构,如图1所示。
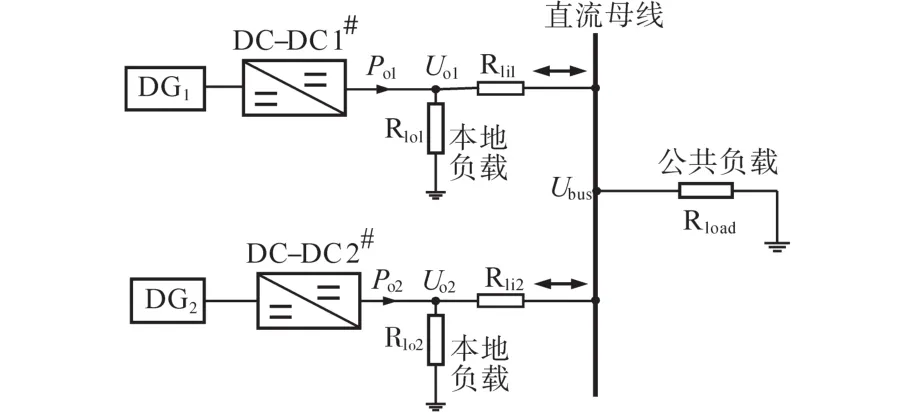
图1 直流微电网简化结构模型Fig.1 Simplified structure model of DC microgrid
图1中:DGi为分布式发电单元;Rlii为微源与直流母线之间的线路阻抗;Rload为公共直流母线负载;Rloi为各变换器出口连接的本地负载。考虑到系统动态响应速度和电压功率的无静差调节,下垂控制环节采用典型的功率-电压控制进行分析,其表达式为

式中:Uoi,Poi分别为第i个微源的输出电压和输出功率;Unom为直流母线的额定电压;Rdi为下垂控制第i个微源的下垂系数(虚拟电阻)。
Rdi的范围由直流微电网所能允许的最大输出电压扰动量和微源的额定功率Pratei决定,定义为
式中:Umin为直流母线运行的最低电压。
为实现等比例的分配负载,下垂系数还需满足:

式中:n为微源个数。
稳态时,理想状态下各微源可以根据选取合适的下垂系数保证功率的精确分配,输出电压即为直流母线电压。
1.2 含线路阻抗和本地负载的下垂特性
实际运行的低压直流微电网中,由于线路参数不匹配和本地负载不平衡,难以最大发挥DGi的工作效率,严重影响功率的精确分配,甚至导致系统环流,影响系统的稳定性。故在线路阻抗、公共母线负载和本地负载共同存在的情况下,对图1模型等值分析,利用三角-星形变换得等效阻抗网络模型如图2所示。
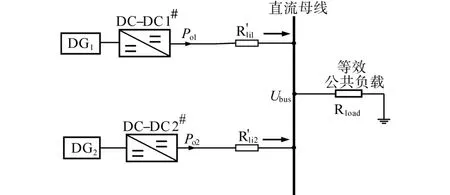
图2 直流微电网阻抗网络模型Fig.2 Impedance network model of DC microgrid
取Req=Rli1+Rlo1+Rload,等效线路阻抗如下式:
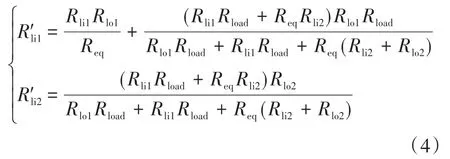
即DGi带有本地负载时,本地负载由DGi处移至直流母线处,将本地负载映射到线路阻抗和公共负载上,因此,本地负载可看成与Rload类似的公共负载参与系统的功率分配,图2中直流母线电压如下式:

式中:Ioi为第i个微源的输出电流。
直流微电网中,并联运行的下垂控制变换器应为基于下垂系数按DGi额定容量等比例承担负载所需功率,考虑到理想状态下垂控制的关系(Rd1Po1=Rd2Po2),化简得实际情况下DGi提供的功率比值为
但实际运行的直流微电网中,由于线路阻抗无法忽略不计、本地负载的功率不平衡等因素,等效线路阻抗不满足匹配条件时,微源提供的功率便存在差异,进而引起分配精度降低,匹配条件如下式:
考虑到实际情况下系统的取值[14]及结合等效阻抗网络模型,推算得R′li1>Rlii,这将使式(5)中直流母线电压产生更大的偏移,影响直流微电网的稳定。
2 直流微电网功率控制下垂法
2.1 功率控制下垂法的理论分析
由第1节的分析可知,微源间功率的合理分配不仅与下垂系数有关,而且还受到系统中本地负载和线路阻抗的影响。通过引入微源输出功率标幺值,增加两个额外的电压偏移量,提出了一种功率下垂控制方法替代传统下垂控制,其中功率以标幺值的形式改变,减少了输出功率与输出电压的耦合关系,提高了控制的鲁棒性和系统的稳定性。功率控制下垂法的表达式为
考虑到线路阻抗不一致、本地负载的不平衡以及微源间等效线路阻抗很难相等,取R′li1>R′li2并设计图1模型进行分析,微源的输出功率为

由于等效线路阻抗不匹配,直接导致下垂曲线Rd1与Rd2不相等,如图3所示。起始时刻,DG1和DG2分别工作于A,B点(假定状态1),输出功率Po1>Po2,Pload=Po1+Po2,状态1时假设负载增加ΔPload,此时增加的负载将有两台分布式电源共同承担,由式(8)得:

忽略分布式电源出口至直流变换器之间的线路影响的情况,状态1到达稳定状态时,由式(11)得:

联立式(2)、式(9)、式(12)得:
式(13)表明,采用功率控制下垂法的情况下,负载的分配比例与微源额定容量的平方成正比,即微源的额定功率越大,在系统中所承担的负载越多,并消除了等效线路阻抗的影响。因此,在增加ΔPload情况下,DG1输出电压跌落速度会比DG2更快,DG1和DG2分别由工作点A,B跌落到A1,B1点,由式(10)知,DG1的功率标幺值会逐渐减少,使得增加的负载会有部分向DG2转移,此时,两台DG便沿着各自Ppu—Uo下垂曲线不断移动,最终稳定于A2,B2点(状态2)。
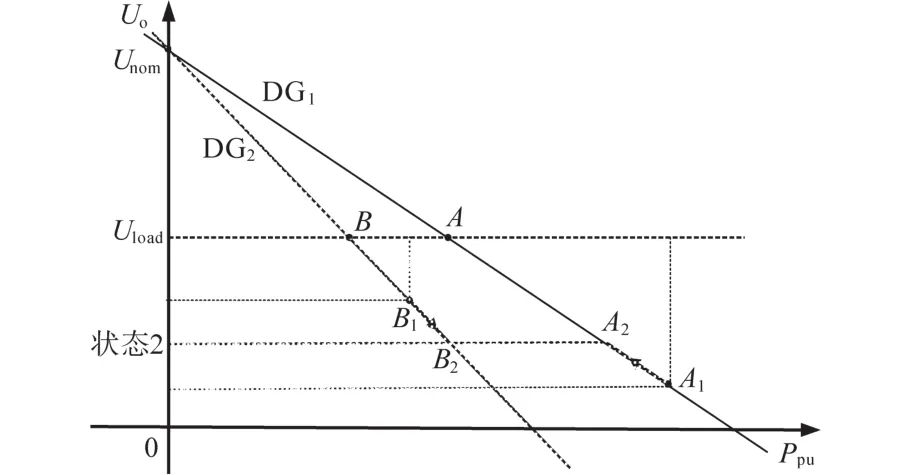
图3 下垂控制器的理论分析Fig.3 Theoretical analysis of droop controller
2.2 直流微电网电压偏移补偿器
由2.1节理论分析,在状态2时已能实现微源间输出功率的均衡,但是此时的输出功率较理想值仍存在一定偏差且母线电压略低于标准值,故在控制器环节加入了电压偏移补偿器,其工作原理如图4所示,系统总体控制如图5所示。
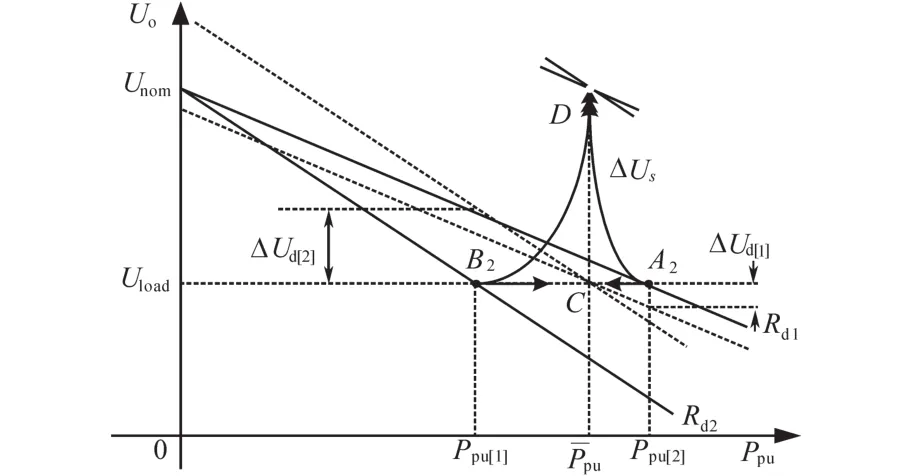
图4 电压偏移补偿器的原理分析Fig.4 Principle analysis of voltage deviation compensator
控制器的主要作用体现在两方面。一方面是状态2时分布式电源DG1和DG2分别工作于A2,B2点的情况下,通过改变均衡式电压偏移(ΔUd[i]),添加到每个分布式电源,达到功率标幺值的平衡点C(状态3);为了确定电压偏移量,通过低速通信网络传输每个微源输出功率,计算输出功率标幺值的平均值Pˉpu及下垂控制的均衡式电压偏移为
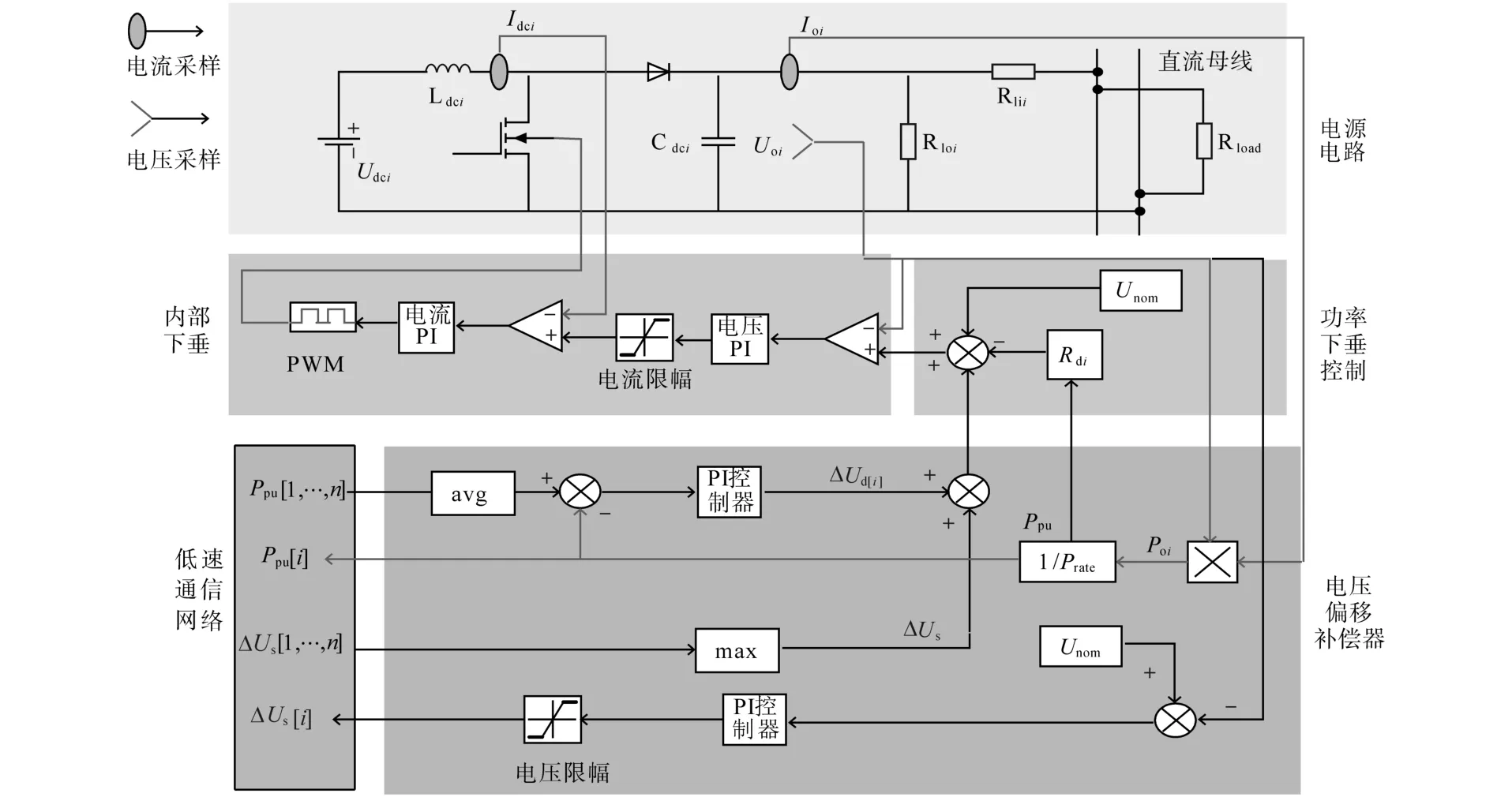
图5 直流微电网系统控制图Fig.5 System control diagram of DC microgrid

式中:GΔP为比例积分(PI)控制器的传递函数。
由于每个微源的输出功率和下垂系数各不相同,所以暂态过程中ΔUd[i]互不相等,但均衡式电压偏移环节加入了PI控制,根据控制理论,稳态时控制器的输入偏移量一定为零,由式(15)得:

尽管网络损耗不尽相同,但微源间亦实现了功率均分,而功率均分的关键为电压偏移环节PI控制器利用ΔUd[i]作为偏移量不断修改输出功率标幺值。
控制器的另一作用为通过改变提升式电压偏移(ΔUs),添加到直流母线,使电压恢复至D点(状态4),由于状态3和状态4的变化是同时进行的,补偿之间互不影响,所以操作点A2和点B2直接移动到D点,为了调节直流母线电压,基于所有微源的提升式电压偏移为

式中:GΔU为PI控制器的传递函数。
ΔUs[i]的值基于本地微源计算得到,考虑到通信故障和通信网络延时带来的影响,这个值与其他微源的ΔUs[j]会有一定的偏差,为了有效补偿负载处的电压降,通过共享所有微源的提升式电压偏移,选取式(17)中最大的电压跌落作为偏移电压量ΔUs,即

式中:ΔUs[m]为第m个微源的电压降,即直流母线最大的电压降(1≤m≤n)。
最终,微源的参考电压表示为

式(19)中,微源参考电压计算值由功率下垂控制、第m个微源的均衡式电压偏移量和提升式电压偏移量共同组成,稳态时,ΔUd[m]和ΔUs[m]均达到恒定,微源的输出电压等于额定电压,此时的状态4和开始的状态1等同,负载的精确分配和电压偏移补偿结束,整个过程分析见图3、图4,状态变化如图6所示。
本文实现控制算法所需的输出功率、电压偏移和平均功率标幺值等信息都是通过低速通信传输到各个补偿控制器。考虑到低速通信网络可能发生故障的情况,在控制器的设计上仍保留了传统下垂控制环节,当微源停止发送偏移信号或无法接收远方信号时,会按照传统下垂控制平均分担负载的变动,此时微源功率分配会受到系统参数和网络结构的影响,但相比于部分微源失去调节能力,依然提高了系统的稳定性。
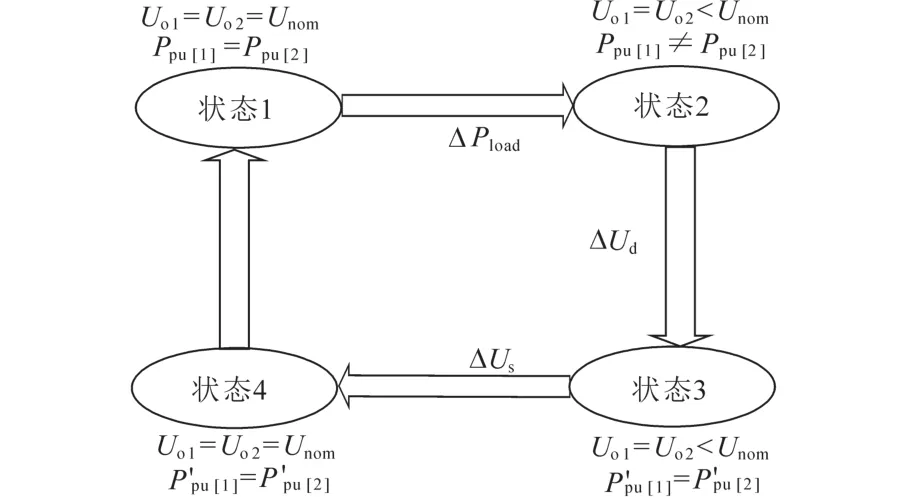
图6 功率控制下垂法的状态变化Fig.6 The state change of power control droop method
3 实验仿真验证
为了验证所提功率控制下垂法的正确性和有效性,在Matlab/Simulink中搭建直流微电网仿真模型,如图7所示。考虑到自治直流微电网的稳定运行不需要外加设备的投资及不向系统注入任何形式的扰动信号等因素,采用被动检测法[15]对线路阻抗值进行预估计,结合实际情况下线路长度不尽相同且为了更突出功率下垂控制的优越性,仿真使用的直流微电网系统参数为:直流母线额定电压Unom=800 V;直流母线最低电压Umin=760 V;1#电源额定容量Prate1=1.5 kW;2#电源额定容量Prate1=1.5 kW;输出电容Cdci=470 μF;输入电感Ldci=0.5 mH;线路阻抗Rli1=0.2 Ω,Rli2=0.8 Ω,Rli3=0.4 Ω;本地负载Rlo1=120 Ω,Rlo2=160 Ω;公共负载Rload1=60 Ω,Rload2=100 Ω。
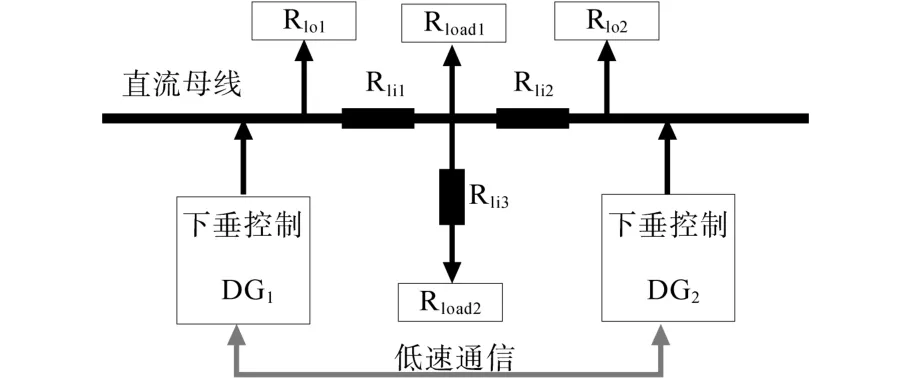
图7 直流微电网的仿真模型Fig.7 DC microgrid in simulation
3.1 通信网络故障情况下的仿真分析
如图5所示,文章采用的功率控制下垂法为在引入微源输出功率标幺值的条件下增加两个额外的电压偏移来实现,为了验证所提方法的性能,此实验模拟了在低速通信网络故障(传统下垂控制)和系统通信恢复的实验仿真对比。通信故障前后系统具备相同的数据参数,实验在运行于孤岛状态的情况进行分析,整个实验4 s结束,前2 s为传统下垂控制,后2 s为所提控制方法,实验结果如图8所示。

图8 传统下垂和功率控制下垂法的仿真结果Fig.8 Simulation results of conventional droop and power control droop
由图8可知,仿真时间t=0~2 s时,输出功率标幺值Ppu[1]=0.45,Ppu[2]=0.56,Ppu[1]≠Ppu[2],即不满足功率均分的效果;分布式电源出口电压Uo1=782.1 V,Uo2=777.6 V,较额定电压800 V有很大的偏差。仿真时间t=2~4 s时,系统采用功率控制下垂法,如图8c所示,通过调整均衡式电压偏移,功率标幺值改变为Ppu[1]=Ppu[2]=0.53;因为两台微源的参数完全一致,即实现了功率的精确分配。图8d中,将提升式电压偏移加入到每个微源参考电压,降低了直流母线电压偏移,分布式电源出口电压Uo1=802.9 V,Uo2=798.2 V,相比于传统下垂控制,电压质量得到了改善。
3.2 负载变化情况下的仿真分析
为了验证在公共负载和本地负载变化时所提功率控制下垂法的有效性,测试了系统在连接和断开电源电路负载时的性能,其中负载按表1所示顺序动态响应。由第1.2节的理论分析,只需保证阻抗网络模型一致即可保证功率精确分配和母线电压质量,整个实验14 s结束,实验结果如图9所示。
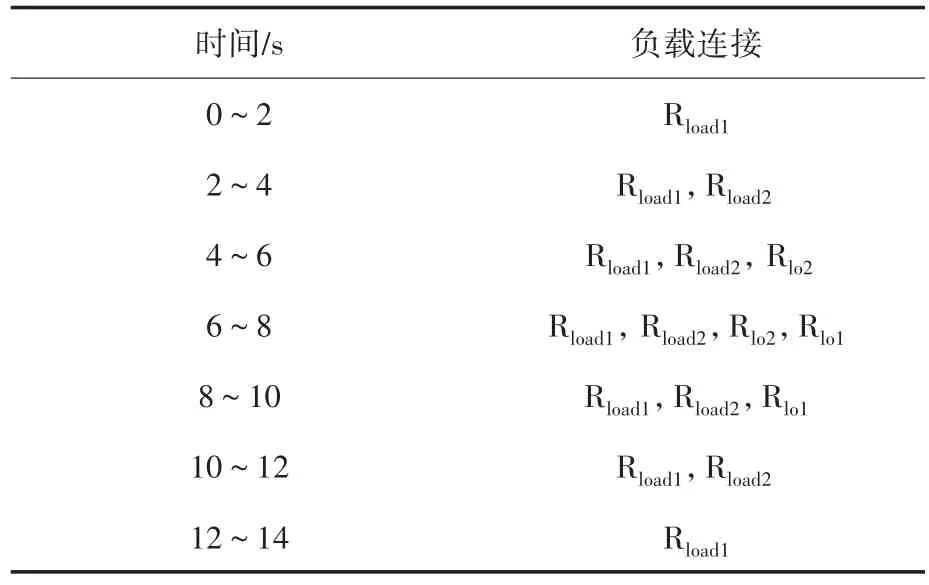
表1 负载变化顺序Tab.1 Load change sequences
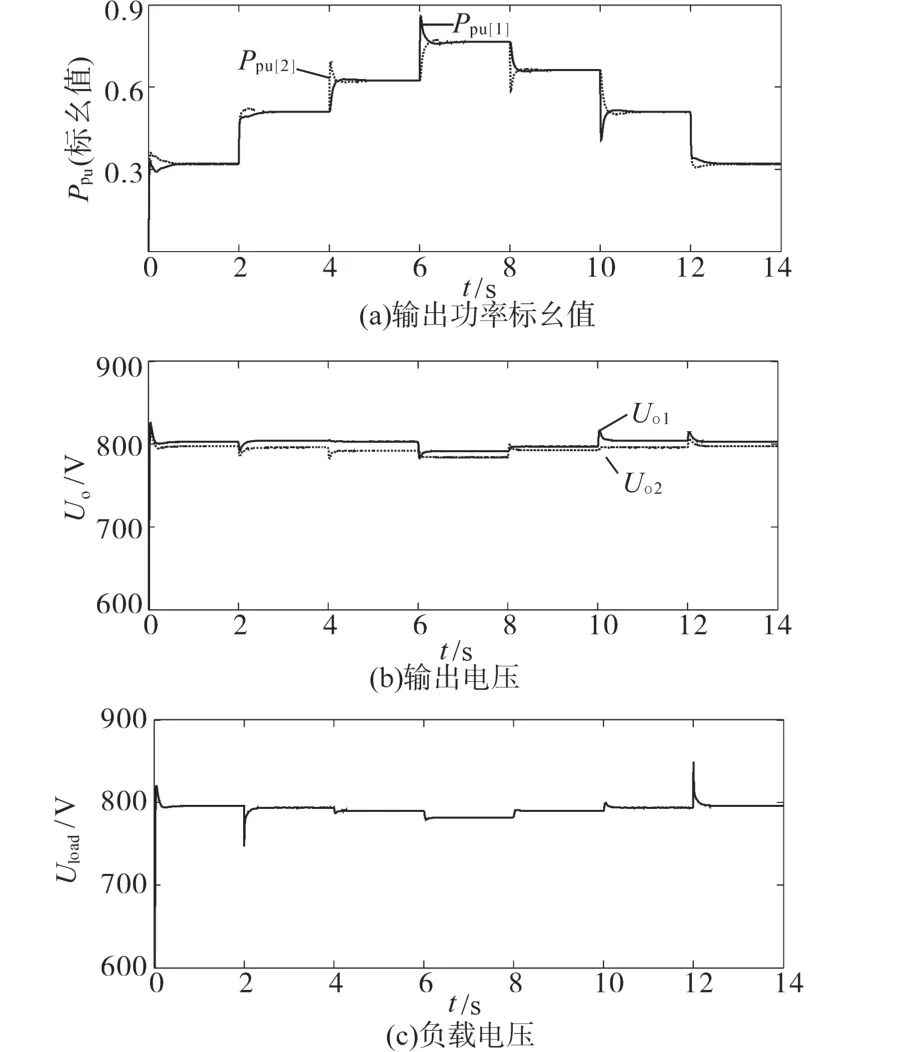
图9 系统多负载接入退出的仿真结果Fig.9 Simulation results of system multi-load access and exit
由于低速通信网络下各微源之间信息实时传递,使按表1所示接入和退出的负载能够在微源间实现均分。图9a中,瞬时暂态过程之后功率标幺值迅速达到新的平衡状态,输出功率保持相等,该方法表明,无论负载如何变化,DG1和DG2之间的功率都是按容量等比例分配。图9b和图9c中,由于提升式电压偏移的补偿,微源的输出电压维持在800 V附近,负载电压Uload在额定电压800 V的1%偏差范围内得到有效调节,从而验证了该控制方法的有效性。
4 结论
针对直流微电网U—I下垂控制功率分配不均和系统环流等问题,本文提出了一种基于功率下垂特性的直流微电网分布式控制方法,通过建立含线路阻抗、公共负载和本地负载三者之间网络模型,消除了功率分配中本地负载的影响,调整均衡式电压偏移以保证功率的精确分配;增加提升式电压偏移以改善母线电压质量;并且利用低速通信网络共享微源间的信息来实时调节偏移量。最后在低速通信网络故障和本地负载不平衡的情况下进行仿真试验,结果证实了直流微电网中该控制方法的可行性与有效性。
猜你喜欢
测控技术(2021年10期)2021-12-21
通信电源技术(2018年3期)2018-06-26
电源技术(2015年11期)2015-08-22
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年10期)2015-04-09
电测与仪表(2015年11期)2015-04-09
电测与仪表(2015年5期)2015-04-09
燕山大学学报(2014年2期)2014-03-11
电机与控制应用(2013年9期)2013-11-21
