基于激光扫描技术的铜尾矿库三维建模及综合应用分析
2021-02-05 08:40胡书林
北京测绘 2021年1期
胡书林 聂 珮
(浙江有色勘测规划设计有限公司, 浙江 绍兴 312000)
0 引言
随着矿山工业的不断发展,尾矿库的数量正在逐渐增加。尾矿库溃坝具有突发性和潜在性,一旦发生,将对下游居民生命财产安全将造成巨大损失。因此,加强对尾矿库的安全监测,构建能够真实反映尾矿库地形起伏条件的三维模型,可以为科学评价尾矿库溃坝风险提供科学的指导[1-4]。
传统测量尾矿库的方法不仅费事费力,而且很多只能获得尾矿库局部地区的地形数据,很难真实完整地反映尾矿库的真实情况,也不能为后续数值模拟分析提供贴近实际情况的基础数据。三维激光扫描技术是继全球定位系统(Global Positioning System,GPS)空间定位技术之后发展起来的又一测绘新技术,通过连续获取点运数据能够快速完成观测目标的三维建模,逐渐在工程领域得到普及应用[5-7]。近年来,已有一些学者针对三维激光扫描技术在尾矿库安全监测中的应用进行了探讨研究,比如马松等[8]对尾矿库溃决影响范围分析的三维激光扫描与颗粒流技术进行探讨分析,王志军等[9]对低空无人机摄影测量技术与三维激光扫描技术在尾矿库三维现状分析中的应用进行了研究,李建等[10]探讨分析了三维激光扫描技术在矿山尾矿库区监测中的应用效果,可为更好地掌握尾矿库在安全状态和企业生产管理提供参考。
本文基于三维激光扫描技术,对安徽某铜尾矿库进行了三维建模分析,同时基于三维建模分析成果,进行了尾矿库溃坝风险的综合评估,相关研究成果可为激光扫描技术在尾矿库三维建模中的进一步应用提供参考。
1 研究区概况
安徽省矿业资源丰富,拥有大大小小尾矿库数百座,本文研究对象为铜尾矿库,位于铜陵市境内,属四等尾矿库规模,一期工程坝体已建设到标高72.6 m,坝高32.6 m,库容405万m3,续建工程库容为459万m3,尾矿库最高使用标高限制在81.0 m。由于尾矿库位于市郊区,下游居住着数十万人口,因此,加强尾矿库的安全监测具有十分重要的意义。
2 建模过程分析
2.1 三维激光扫描系统选取
三维激光扫描系统按照搭载方式的不同可分为:星载激光扫描仪、机载激光扫描仪、地面三维激光扫描系统和手持型激光扫描系统,本文选择地面三维激光扫描系统对研究区进行数据采集和建模分析。地面三维激光扫描的工作原理是利用地面三维激光扫描仪内部的激光发射器发射激光信号,当激光碰到目标物表面发射回来后由激光接收器对回波信息进行接收,并可以实现水平和垂直方向的自由转换,实现对目标物体的全方位扫描,测量原理示意见图1。

图1 地面三维激光扫描原理示意图
选用RIEGL VZ-2000型激光扫描系统进行数据采集,该扫描仪属基于飞行时间差的脉冲式激光扫描仪,扫描范围2.5~2 050 m,100 m外距离精度为5 mm,激光发射频率为400 000点/s,水平扫描角度为360°,垂直扫描角度为100°,内置罗盘精度5°,倾斜补偿精度10°。
2.2 外业数据采集
外业数据采集流程可分为以下几个步骤:接收任务、探勘扫描现场、编制扫描实施方案、仪器检查、安置地面激光扫描仪、选择扫描区域、设置扫描距离以及空间分表率等参数、完成测站点扫描工作、扫描数据检查。
在外业数据采集过程中应该着重注意以下几点:
(1)由于倾斜补偿范围为±10°,因此需要确保仪器整平,保证仪器倾斜角度处于补偿范围内。
(2)扫描仪站点应尽量布设在视野开阔地段。
(3)合理设置扫描仪分辨率,分辨率过高,数据量过大,影响工作效率;分辨率过低,数据过少,影响数据精度。
(4)相邻两站扫描区域应保持20%~30%的重叠区以确保数据完整性和拼接精度。
(5)扫描过程中要尽量避免人、车辆等外界环境的干扰。
(6)测量结束后,应及时对测量区域、仪器高度、扫描数据保存等进行检查,确保测量成果的精确性。
根据研究实际地形情况,进行外业数据采集,数据采集得到的原始点云数据见图2。

图2 原始点云数据
2.3 点云数据处理
点云数据处理包含四个流程:点云数据去噪、点云数据拼接、点云数据滤波、点云数据压缩。
(1)受扫描仪自身系统误差以及环境等不确定因素的影响,所采集到的原始点云数据存在误差,因此需对原始点云数据进行去噪处理,采用基于偏差和反射率的综合点云去噪方法对原始点云数据进行处理,一共去除了24 852 028个噪声点。
(2)采用基于多站点配准算法,将四个站点经去噪后的点云数据进行拼接
(3)将拼接过后的点运数据分为有序点云和散乱点云,采用RiSCAN PRO点云处理软件的迭代内插模型对云数据进行滤波处理,通过手动删除等方法将高于阈值范围的非地形数据剔除干净。
(4)虽然进行了云数据滤波处理,使得点云数据量大大降低,但为了进一步简化计算量,提高工作效率,仍需要将多余的点云数据进行压缩处理,本文采用随机抽样法与等间距采样法相结合对尾矿库地势平坦地区进行点云数据压缩,采用八叉树采样法对尾矿库地势起伏较大的部位进行点云数据压缩。
点云数据处理流程见图3。
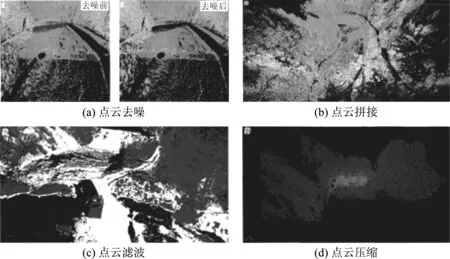
图3 点云数据处理流程及结果
2.4 成果输出
尾矿库成果输出主要经历三个流程:
(1)利用处理好的点云数据生产规则三角网和规则格网,构建研究区尾矿库的数字高程模型(Digital Elevation Model,DEM),为尾矿库地形要素的提取提供高精度、高效率、高清晰的基础数据。
(2)通过建立好的DEM模型,绘制研究区尾矿库的等高线,等高线间距为1 m。
(3)在 RiSCAN PRO软件中截取需要测算的范围,然后构建一个垂直于Z轴的平面,即可得到尾矿库的三维模型和库容量。

图4 尾矿库成果输出流程及结果
尾矿库成果输出流程见图4。
3 数值分析
3.1 尾矿库体模型构建
通过三维激光扫描获得了尾矿库的三维复杂地形点云数据,然后通过点云数据处理和成果输出,得到了尾矿库三维模型,将三维模型数据点信息通过编程,并生成与FLUENT相匹配的文件,将文件导入数值模拟软件中,并考虑研究区范围和计算机的运行能力,选用5 m精度的格网点数据进行分析。导入坐标点后,然后使用GAMBIT读取数据文件,依次进行线连接、面创建,最终生成尾矿库的体模型(图5)。

图5 尾矿库体模型
3.2 模拟过程
尾矿砂本构模型选用宾汉模型,密度为1 800 kg/m3,屈服应力为13.75 kPa,塑性黏度为500 Pa·s。
模型的基本假设为:
(1)尾矿库砂浆为各向同性的连续体;
(2)尾矿库发生瞬间坍塌,不考虑渐溃过程;
(3)不考虑砂浆体对下游的冲刷作用。
分别对尾矿库溃坝后0 s、10 s、25 s和35 s后的砂浆演进过程、砂浆运动速度以及砂浆压力变化等进行模拟分析。
3.3 结果分析
模拟分析得到的尾矿库溃坝过后砂浆演进过程见图6。从图6中可以看到:随着溃坝时间的增加,尾矿库砂浆的面积越来越大,从扇形涌浪逐渐向下游地势较低地区扩散,并在25 s时运动到沟口,最后形成一个中间厚两边薄的扇形堆积体;经模拟分析,尾矿库溃坝后,将淹没农田约8×104m2,沟口数十户民房将受到直接威胁。
模拟分析得到的尾矿库溃坝过后砂浆演进过程如图7所示。尾矿库溃坝前,尾矿砂的速度为0。发生溃坝后,在重力作用下,尾矿砂向地势低处不断运动,速度最大位置在龙头位置。当溃坝10 s后,最大速度达到21 m/s;之后由于能量损失,速度逐渐减小,当溃坝35 s后,尾矿砂向四周扩散。因此,在进行尾矿库灾害防治时,应该在尾矿库下游出口处修建适量的谷坊,以增大砂浆运动的能量损失,同时改变砂浆的流动方向,从而减小矿砂的流动速度。

图6 尾矿库不同时刻砂浆流态变化图

图7 不同时刻砂浆运动速度变化图
模拟分析得到的尾矿库溃坝过后砂浆对地面的压力变化见图8。当尾矿库未发生溃坝时,地面所受的压力主要为堆积尾矿砂的重力;当溃坝发生后,砂浆对地面的最大压力逐渐由库区向下游移动,此时地面所受压力包括砂浆自重和砂浆运动的动压力;当尾矿库溃坝35 s后,地面所受的压力值达到最大。

图8 不同时刻砂浆对地面压力变化图
4 结束语
本文基于三维激光扫描技术,从扫描系统选取、外业数据采集、点云数据处理以及成果输出四个方面对某铜尾矿库的建模过程进行了详细分析,构建起能够真实反映尾矿库地形起伏条件的三维模型,并通过编程将尾矿库的三维模型转换为与数值分析软件相匹配的文件,对尾矿库溃坝演化过程和风险进行了评估。三维激光扫描技术可为数值分析提供比较贴近实际情况的基础数据,可进一步提升尾矿库溃坝风险评估的准确性。
猜你喜欢
现代矿业(2022年9期)2022-10-14
现代仪器与医疗(2022年2期)2022-08-11
昆钢科技(2022年2期)2022-07-08
安全与环境工程(2021年6期)2021-12-04
消防界(2019年5期)2019-09-10
居业(2018年9期)2018-10-24
劳动保护(2018年8期)2018-09-12
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14