基于数字信号处理器实现特定消谐脉宽调制控制技术的研究*
2021-02-04 07:02曾桂珍曾润忠张广远
城市轨道交通研究 2021年1期
曾桂珍 曾润忠 张广远
(1.华东交通大学机电与车辆学院,330013,南昌;2.华东交通大学土木建筑学院,330013,南昌;3.中车大连电力牵引研发中心有限公司,116022,大连∥第一作者,副教授)
在大功率交流传动高速发展的今天,谐波对用电设备的危害也变得愈发严重。传统的PWM(脉宽调制)方法无法消除或抑制谐波的发生。谐波不仅会造成牵引电机定转子发热、转矩脉动,还会污染设备的电磁环境,降低系统的稳定性[1]。特定次谐波消除脉宽调制(SHEPWM)技术,是由美国PATELH S和HOFTR G 教授提出的一种优化PWM 技术。它主要是通过优化算法对脉冲开关导通角进行选择,来有效减少输出中的低次谐波分量,实现特定次谐波的消除,以减小因谐波引起的转矩脉动[2]。
本文以三相电压型逆变器为分析对象,先根据SHEPWM 控制技术的基本原理建立数学模型,推导出特定谐波消除中开关角与调制度之间的关系;然后利用Matlab 软件工具对该非线性关系方程组进行求解,同时得到不同载波比下对应的PWM 单相电压脉冲输出波形及FFT(快速傅里叶变换)分析,来验证算法的正确性;最后利用dsPACE 仿真平台数字化实现SHEPWM 控制技术,同时对基于数字信号处理器(DSP)实现的SHEPWM 控制技术进行试验验证,分析输出电压、电流在不同载波比下谐波消除情况,以此来证明本文所提出的基于DSP 实现的SHEPWM 控制技术能够有效消除低次谐波、减小电流脉动,并提高电能控制质量。
1 SHEPWM 控制技术的基本原理
SHEPWM 控制技术的基本原理是在逆变器多次换向中,恰当地控制输出相电压波形使其存在特定的缺口,即使其不存在某些特定的谐波。一般来说,在半个周期的电压波形中每设定一个缺口,就可以消除一种谐波。但是在控制电压输出时,必须要满足波形在正负半周零点对称和半周内π/2 对称。这样使得输出电压波形为奇函数,不存在偶次谐波和余弦量,使谐波含量达到最少。以单相双极性SPWM(正弦脉宽调制)为例,假设当开关角αi满足式(1)条件[3],得到其电压波形如图1 所示。

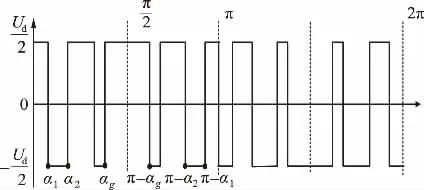
图1 单相双极性SHEPWM 输出波形
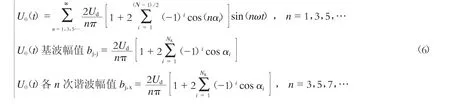
从图1 中得知:该电压波形在半个周期内以π/2 为中心镜像对称,在一个周期内以π 为中心旋转对称,这样就满足了SHEPWM 输出波形的基本要求[4]。本文对该双极性PWM 波形进行傅里叶变换分析,设ao为直流分量、an为余弦分量、bn为正弦分量、n 为谐波次数、ω 为旋转的角频率、t 为时间,则可得到图1 所示波形的输出电压U(0t)傅里叶分解表达式为:

根据SHEPWM 控制技术基本要求,该波形在[0,2π]域对π 点为中心对称,在[0,π]域对π/2 点为轴对称。因此式(2)满足式(4)条件:

将式(4)代入式(2)即可求出傅里叶级数的ao、an、偶次正弦分量bo和奇次正弦分量bj分别如式(5)所示:

式中:
N——[0,2π]区间的脉冲数,又叫载波比;
(N-1)/2——一个周期内开关角个数,本文用NK表示;
αi——[0,2π]区间内的NK个开关角中的第i个开关角。
从式(5)可知,SHEPWM 波形的ao、an、bo都为零[5-6]。所以傅里叶变换后U0(t)表达式可简化为:
从式(6)可知,各次bj,x是与αi有关的函数,只 要求得各个αi大小使得bj,x=0,即可消除频率为n次的谐波量。根据电动机结构连接方式特点,电动机自身可以消除线电压中3 的倍次谐波,所以SHEPWM 控制技术中重点消除的谐波次数为5,7,11,13,…。根据理论总结可知,单位周期内N个调制脉冲可消除NK-1 种谐波,可消除的谐波次数为n=6K±1[5]。其中:K 取值范围为[1,NK-1],且当NK为奇数时,n 最大可以取到3NK-2;NK为偶数时,n 最大可以取到3NK-1。
根据电机控制理论,由于Ud一般固定不变,电机输出电压的大小可以用调制度m 来衡量,其中m定义为bj,j与π/2 倍Ud的比值。

所以由式(6)和式(7)得知,假设需要消除低次谐波,就需要bj,x=0。那么SHEPWM 控制技术的αi与m 之间的数学模型表达式为[6-7]:

2 Matlab 软件模拟αi 计算及电压波形分析
根据上述各式可知,SHEPWM 控制技术的αi与m 存在一定关系。但所得的方程组为多变量非线性超越方程组,求解难度大、结果也并不唯一,无法直接得到实时解。所以,本文利用Matlab 软件编写相应的m 函数,选定初值后,利用迭代的方法对不同载波比下SHEPWM 的αi与m 进行离线求解,并根据求解结果对SHEPWM 输出的单相电压脉冲波形进行分析,以验证算法求解后的正确性。
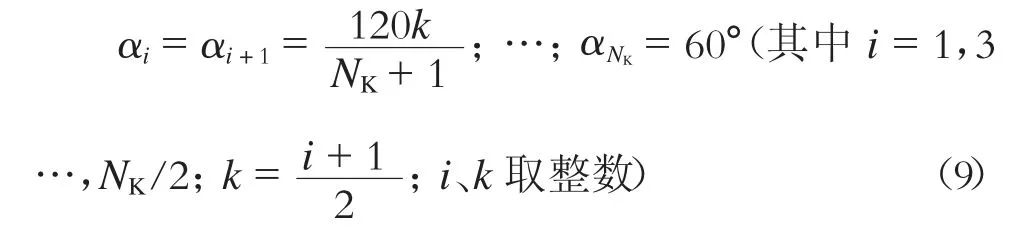
在Matlab 软件的非线性方程组函数求解中,合理选择初始值有助于迭代算法能够快速收敛,SHEPWM 的初始αi分布范围主要包含0° ~60°和0°~90°两种。本文采用初值选择在0°~60°范围内进行求解。其中初始αi选择公式为[6-7]:
在大功率交流传动控制系统中,受到开关器件损耗和散热问题的影响,PWM 的载波比都很低。为了保证输出电压正弦度、减小负载电机转矩脉动、降低开关损耗,一般在低速情况下逆变器输出采用异步调制;中、高速情况下,逆变器输出电压采用分段同步调制。其中异步调制区载波比相对较高,谐波含量小,无需再进行特定次谐波消除[8]。同步调制区谐波主要集中在载波比为11、7、5 分频中,SHEPWM 谐波消除的意义重大。本文根据实际应用情况,以载波比11 分频为例,利用式(8)和(9)得到11 分频下SHEPWM 的αi与m 之间的非线性方程式,同时利用Matlab 软件编写对应的.m 函数,对载波比11 分频的非线性方程组进行求解,得到其m和αi的关系(见图2)和单相电压脉冲谐波(见图3)。

图2 载波比为11 时m 与αi 的关系图
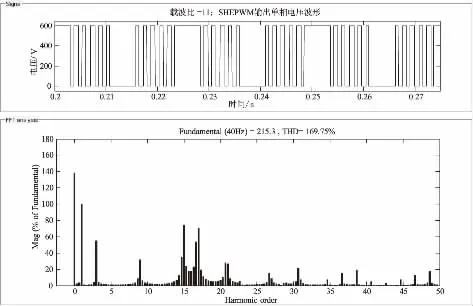
图3 载波比为11 时单相电压谐波截图
设定Ud=600 V、11 分频时电压输出频率fout=40 Hz、m=0.57。从图3 中可以看出,当载波比为11时,5、7、11、13 低次谐波基本消除。同理设定7 分频的m 为0.75、输出电压频率为52 Hz,5 分频的m 为0.86、输出电压频率为60 Hz,可以得到载波比为7、5 分频下其m 和αi的关系和单相电压谐波分别如图4 ~7 所示。
根据SHEPWM 消谐理论,单位周期内N 个调制脉冲可将NK-1 种谐波消除,可消除的谐波次数为n=6K±1。从Matlab 软件对不同载波比下单相电压脉冲波形的FFT 分析结果可以看出:SHEPWM在载波比等于11 时,基本消除了5、7、11、13 次谐波;在载波比等于7 时,消除了5、7 次谐波;在载波比等于5 时,可以消除5 次谐波。通过以上分析计算可知,通过Matlab 软件的迭代运算,所得到的m 和αi的关系能够实现SHEPWM 对特定次谐波的消除,验证了算法的可行性。

图4 载波比为7 时m 与αi 的关系图

图5 载波比为7 时单相电压谐波截图

图6 载波比为5 时m 与αi 的关系图

图7 载波比为5 时单相电压谐波截图
3 仿真和试验
为了深入研究SHEPWM 对谐波消除的实际情况,本文利用美国TI 公司提供的DSP 控制芯片TMS320F28335,编写软件语言对SHEPWM 进行数字化实现,并下载到该控制芯片当中;同时针对该芯片搭建配套的硬件电路,结合dsPACE 半实物仿真平台对SHEPWM 的PWM 波形进行硬件实现;最后利用试验平台带负载电机运行,验证SHEPWM在实际应用中谐波消除情况。
为保证试验数据统一,本文在dsPACE 半实物仿真平台和最后试验中使用相同的电机参数。其中异步电机参数如下:定子电阻Rs=0.038 1 Ω,定子漏感Lls=0.525 8 mH,转子电阻Rr=0.028 8 Ω,转子漏感Llr=0.945 1 mH,互感Lm= 19.479 mH,电机转动惯量J=0.2 kg·m2;电机的额定功率Pn=435 kW,额定频率fn=31 Hz,额定线电压Un= 800 V,额定转矩为6 800 Nm。逆变器直流电源电压为1 800 V。
为降低开关损耗、提高电压利用率、减小不同载波比之间相互切换过程中的电流冲击,本仿真和试验在电机低速区采用异步调制,中高速区采用分段同步调制的方式。其中,分段同步调制区包括11 分频、7 分频和3 分频,最后经过3 分频自然过渡到方波工况。根据上述SHEPWM 基本理论,载波比为3分频和方波工况时与普通PWM 一样不能进行谐波消除,所以本文主要研究电机控制运行在11 分频和7 分频时,对SHEPWM 进行dsPACE 半实物仿真分析和试验验证。其中dsPACE 半实物仿真结果如下:图8 给出了在11 分频和7 分频情况下电机定子磁链轨迹,从图中可以得知定子磁链受PWM 脉冲控制为规则对称的多边形,磁链控制无畸变,磁链值约为2.4 Wb;图9 给出了11 分频情况下电机输出电流和相电压波形,从图9 中可以看出电机输出电流稳定且无震荡,其有效值约为290 A,相电压输出正弦度良好,软件分析其相电压有效值约为620 V。
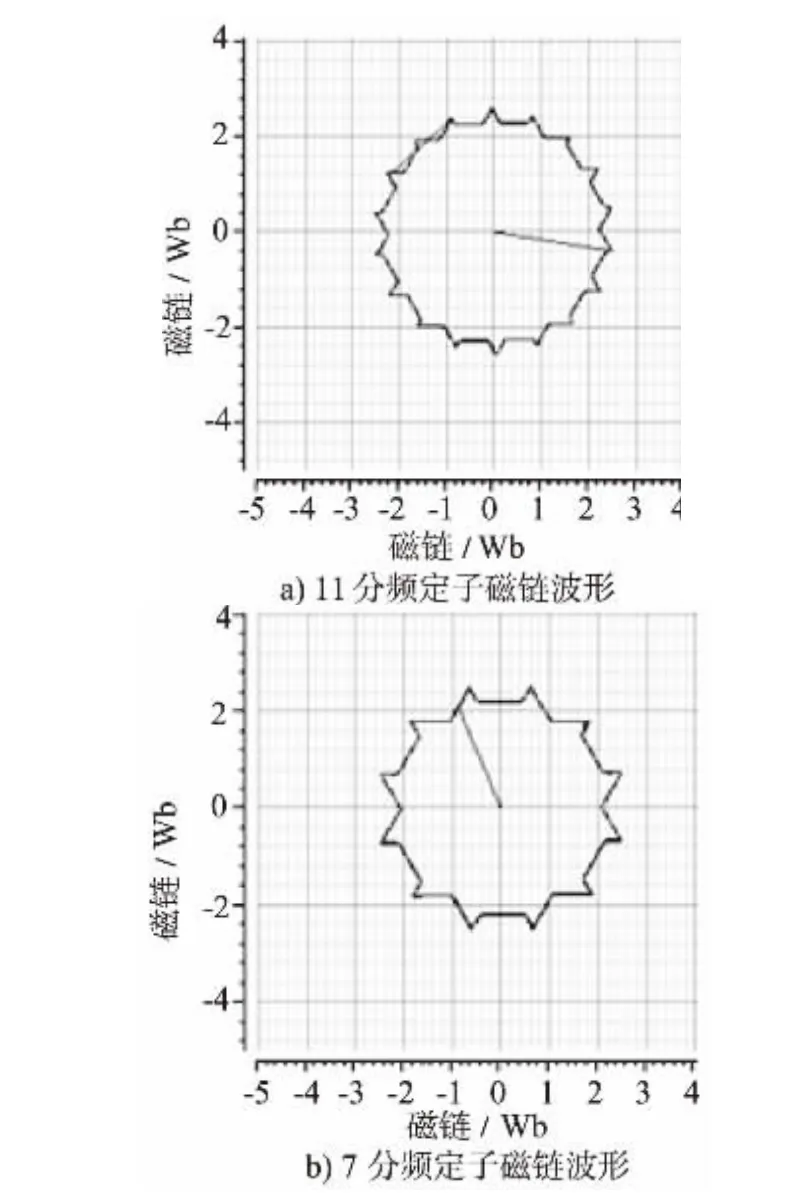
图8 电机定子磁链波形

图9 11 分频下电机输出电流和相电压波形
从半实物仿真结果可以看出,通过DSP 可数字化实现SHEPWM,能够达到控制电机在全速度范围内稳定运行。其电流输出平衡稳定,转矩脉动小。根据半实物仿真情况,搭建大功率交流传动机车试验平台,验证该算法在实际应用中的情况,具体波形和数据结果如下:
图10 分别显示了在实际运行中电机线电压和电流波形。从图10 波形中可以看出SHEPWM 同步调制在11 分频(0 ~0.06 s)和7 分频(0.06 ~0.12 s)工况下运行时,电机电压输出稳定、电流平衡;在两者进行切换时,电机电流运行稳定、冲击很小,电压波形输出正常。从图10 电流波形看,因为7 分频的PWM 电压输出脉冲数减小、电流波形波动较大,所以11 分频的电流波形平滑度要优于7 分频,其整体谐波含量也偏小。
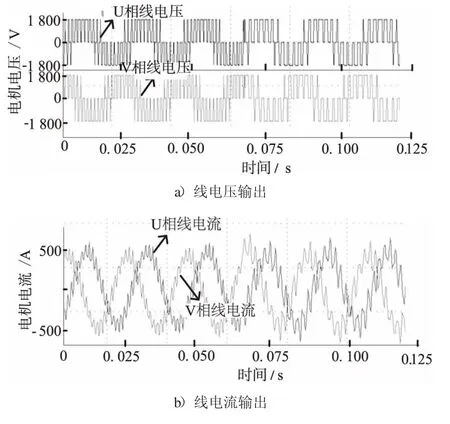
图10 线电压和电流输出波形
为了分析实际运行中电机输出电流的谐波含量,本文将切换前后的电流数据导出,利用FFT 工具进行谐波分析。其中示波器采样周期为100 μs,选取导出的波形长度时间均为0.1 s,其电流输出基波频率为49.751 Hz。从图11 中经FFT 分析可知:在11 分频时,电流的5、7、11、13 次谐波都基本消除,谐波从17 次开始增加;在7 分频时,电流的5、7次谐波被消除,谐波从11 次开始增加。两者切换前后的输出电流基波大小基本相同,但由于7 分频的载波比较小,谐波整体含量略高于11 分频。
从试验运行波形来看,基于DSP 实现的SHEPWM 在实际运行中的电机运行稳定,电压和电流波形良好,转矩脉动较小;从对电流波形的FFT分析可以看出,在全速度范围内,SHEPWM 能够有效消除其特定的低次谐波含量,可提高电压利用率、减少转矩脉动。
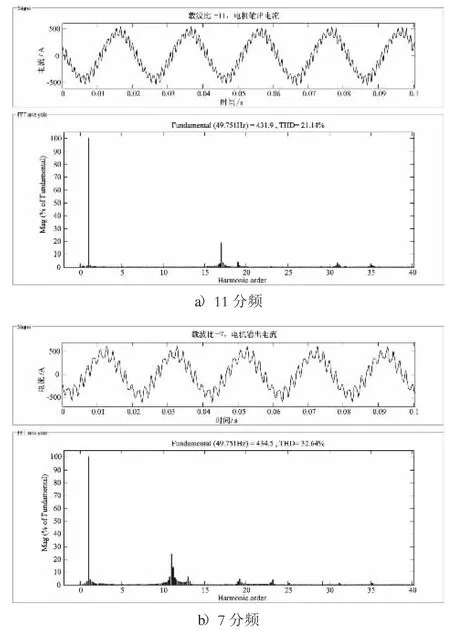
图11 输出电流谐波分析截图
4 结语
本文通过深入分析SHEPWM 控制技术的基本原理,对特定谐波消除中αi与m 之间建立相应的数学模型;然后,利用Matlab 软件对该数学模型在不同载波比下进行求解,得到对应的PWM 单相电压脉冲输出波形,并进行FFT 分析验证算法的正确性;最后利用dsPACE 半实物仿真平台及试验,对基于DSP 实现的SHEPWM 控制技术进行验证。试验通过对电机输出转矩、电压和电流的波形分析,证明了本文所提出的基于DSP 实现特定消谐PWM 控制技术能够有效消除电流中的低次谐波、减小电流脉动、提高电压利用率,可为后续深入研究谐波对交流传动控制系统的影响提供参考。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
照明工程学报(2016年3期)2016-06-01
西部广播电视(2015年10期)2016-01-18
舰船科学技术(2015年8期)2015-02-27
电测与仪表(2014年15期)2014-04-04
电测与仪表(2014年1期)2014-04-04
华东理工大学学报(自然科学版)(2014年2期)2014-02-27
地震研究(2014年1期)2014-02-27