面向太阳系边际探测的多天体借力目标选择方法
2021-01-30 07:56曹知远李翔宇
深空探测学报 2020年6期
曹知远,李翔宇,乔 栋
(北京理工大学 宇航学院,北京 100081)
引 言
太阳系边际是太阳风与星际介质的交界处,是实现终止激波、空间射线、宇宙尘埃、河外背景光、黄道云等探测的绝佳场所,将增进人类对太阳系形成与演化的认知。我国已成功开展月球环绕与着陆探测,并稳步实施火星与小天体探测,走向更遥远的深空是未来发展的必然趋势[1-2]。目前国际上开展太阳系边际探测,作为任务拓展“旅行者1号”(Voyager 1)和“旅行者2号”(Voyager 2)先后实现了飞越,其中“旅行者1号”于2012年8月在距日122 AU处穿越日球层顶北部[3],首次离开太阳系进入星际空间,目前距日已超过149 AU;“旅行者2号”也于2018年11月穿越日球层顶南部[4]。此外,“先驱者10号”(Pioneer 10)和“先驱者11号”(Pioneer 11)也相继在完成预定探测任务后飞向太阳系边际。欧美各国近年来纷纷提出了专门针对太阳系边际探测的任务概念与方案[3]。
太阳系边际距离地球遥远,探测所需轨道能量大,利用多天体借力飞行提升轨道能量并缩短转移时间,是突破太阳系边际探测能量需求瓶颈的重要途径。然而,多天体借力飞行转移轨道序列的选择与评估、优化设计问题一直以来都是困扰航天领域的难题之一。针对多天体借力转移轨道设计问题,学者们开展了大量研究,Vasile等[6]提出了近心点机动多天体借力(Multiple Gravity Assist ,MGA)模型,Vinkó等[7]提出了探测器在转移弧段中间的深空轨道机动(Multiple Gravity Assist with Deep Space Maneuver,MGA-DSM)模型。利用以上模型,基于遗传、微分进化、粒子群等多种优化算法的固定序列多天体借力转移轨道设计方法被提出[8-9]。同时多天体借力飞行序列规划也被研究,Gad和Abdelkhalik[13-14]提出了一种隐藏基因遗传算法,实现参数设计空间可变和变量数目动态调整的优化问题求解,并求解了木星、土星和水星探测任务的最优多天体借力序列。Englander等[15]提出了嵌套环式算法,分别通过外内环实现整数和实数优化,并应用于地球-木星和地球-土星多天体借力飞行序列选择。然而,目前国内外针对太阳系边际探测的多天体借力飞行序列和转移轨道设计研究较少,太阳系边际探测时间跨度大,所需借力飞行次数多且受行星星历约束严苛,任务窗口的改变可能影响最优多天体借力序列。同时,太阳系边际空间范围广,不同的科学目标决定了探测器不同的日球层探测方位(如鼻尖、尾部等),同样影响太阳系边际探测的多天体借力序列选择。
本文基于已有研究,开展面向太阳系边际探测的多天体借力序列选择与轨道设计研究。首先给出两种多天体借力的动力学模型,并对比两种模型的优劣。其次,给出太阳系边际探测优化目标的处理方法,并将两种多天体借力模型结合提出一种逐步多层嵌套的多天体借力轨道优化方法,用于解决不同任务约束的太阳系边际探测多天体借力转移轨道优化设计。最后,基于提出的优化方法,分别给出2030-2040年针对太阳系鼻尖与尾部的探测轨道飞行序列,研究可以为我国未来的太阳系边际探测方案设计提供参考。
1 多天体借力动力学模型
MGA模型和MGA-DSM模型是多天体借力飞行中常用的两种动力学模型。MGA模型假设飞行器只在相对借力天体的双曲线轨道的近心点施加机动,不同借力天体之间的转移弧段为一条完整的圆锥曲线。MGA-DSM模型则假设借力过程没有机动,而允许探测器在不同借力天体之间的转移弧段施加深空机动。本节将分别介绍这两种多天体借力动力学模型并对比其应用场景。
1.1 多天体借力MGA模型
多天体借力MGA模型仅允许飞行器在借力过程中的近心点施加一次脉冲机动,在不同借力天体间转移时不施加任何机动,如图1所示,v1/in和 v1/out分别表示探测器进入和离开借力天体影响范围时的双曲超速,δ表示借力转角即v1/out与 v1/in之 间的夹角,Δ v即为在近心点施加的速度增量。
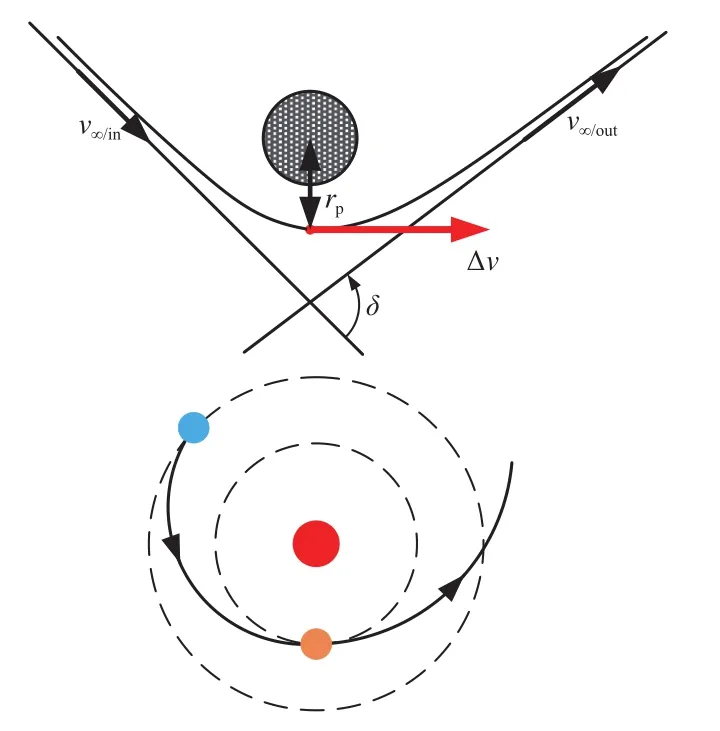
图1 多天体借力MGA模型示意图Fig.1 MGA schematic
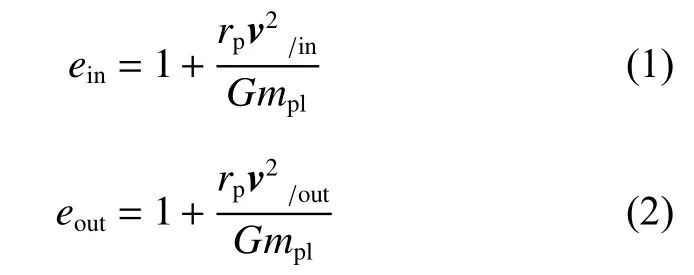
在MGA模型中,当前借力天体处的借力转角 δ、借力半径 rp和 所需的机动大小Δ v 由 双曲超速v1/in和v1/out决定。进入和离开借力天体的双曲线轨道的偏心率ein与 eout可以表示为
且满足关系

其中:G 表示引力常数,mpl表示借力天体的质量。
若已知 v1/in、 v1/out和 δ ,通过联立式(1)~(3)可计算出 rp。 对于同一借力天体,当v1/in、 v1/out一定时,rp越 小,借力转角δ 越大、借力效果越明显;当rp趋 近于0时,δ 趋 近于180°。但借力半径rp需大于行星半径,否则探测器将与行星相撞。可通过设置相应的惩罚函数避免借力半径小于行星半径的情况出现。若rp在可行范围内,则近心点所需施加的速度增量可表示为

若施加的速度增量方向与当前速度方向一致,将探测器在每个借力天体近心点处所需施加的速度增量求和,即为多天体借力MGA模型转移轨道所需的总速度增量。
利用MGA模型设计多天体借力转移轨道时,只需设计发射时间、每一借力时间和到达时间,即若地球、借力天体和目标天体共 n 个天体,则决策变量有n 个。
1.2 多天体借力MGA-DSM模型
与MGA模型假设探测器总是在借力过程的近心点施加机动不同,MGA-DSM模型中探测器始终进行纯借力。若进入双曲超速 v1/in已知,那么纯借力的效果由借力半径 rp及 v1/out的 B平面夹角γ 决定。B平面参考系由3个矢量构成
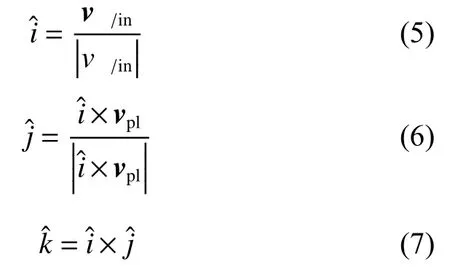
其中:γ 则是v1/out与由 ˆj和k ˆ 张成的平面的夹角。
纯借力情况下,同一借力过程中的进入和离开双曲超速大小是相同的,因此离开双曲超速为

其中
虽然MGA-DSM模型中借力过程无动力辅助,但允许探测器施加深空机动,机动更加灵活。深空机动的位置由时间乘子η 表示,若探测器从上一借力天体到下一借力天体转移时长为 T ,则飞行器在完成借力的ηT时间后实施深空机动。在已知上一借力天体的离开速度矢量时,借力天体之间转移过程的前半段可以采用开普勒递推得到,转移后半段可以通过求解兰伯特问题获得。而地球发射时探测器的位置、速度矢量分别为
其中:rpl、vpl分别为行星的位置和速度矢量;Δ vLV、RLA、 D LA分别为发射时的双曲超速大小、经度和纬度。
综上,如果地球、借力天体和目标天体共 n个天体,那么式(12)中共有 4 n−2个决策变量,如图2所示。
图2 多天体借力MGA-DSM模型示意图Fig.2 MGA-DSM schematic
1.3 MGA模型与MGA-DSM模型对比
MGA模型和MGA-DSM模型各有优缺点,分别适用于不同的场景。
MGA-DSM模型比MGA模型更加精确。MGA模型的决策变量仅包含探测器经过各个天体的时间点;而MGA-DSM模型的决策变量不仅包含探测器经过各天体的时间点,还包含深空机动的时间、借力半径、v1/out的B平面夹角γ 这些变量,更详细地涵盖了深空机动和借力过程的信息。
MGA模型比MGA-DSM模型更易于收敛。如1.1节和1.2节中所描述,若地球发射、每一次借力天体、目标天体共n 个天体,那么MGA模型只包含n 个变量,而MGA-DSM模型包含 4 n−2个变量。MGA模型包含的变量数远远小于MGA-DSM模型所包含的变量数,因而在同一优化算法中,MGA模型可以更快收敛。
对于共振借力这种特殊的借力情况,MGA-DSM模型比MGA模型处理得更好。共振借力指飞行器从某一借力天体离开后,在转移轨道远日点施加较小的机动,以改变再次回到该借力天体的双曲超速并再次进行借力;而MGA模型无法完成远日点处的机动。共振借力中,探测器在远日点施加的机动通常要明显小于飞行器前后两次经过借力天体双曲超速的改变,表明相同共振借力情况下MGA模型中借力天体近心点所需速度增量远大于MGA-DSM模型中转移轨道远日点施加的速度增量。因此,共振借力在MGA-DSM模型中的表现较MGA模型中更好。
MGA模型和MGA-DSM模型的优缺点汇总如表1所示。由表1可以看出,MGA模型适合用于初步的简单设计和筛选,MGA-DSM模型适合更进一步的详细设计。

表1 MGA模型与MGA-DSM模型表现对比Table 1 Comparison between MGA and MGA-DSM
2 太阳系边际探测转移轨道设计方法
由于太阳系边际距离地球遥远,从地球发射探测器直接转移所需的发射能量巨大,目前的运载工具无法实现,因此采用多天体借力飞行是实现太阳系边际探测的必然选择。然而,太阳系中可借力天体数量众多,借力序列的可能组合数量巨大,同时随着借力次数的增加,轨道设计变量成倍增加,太阳系边际探测的转移轨道设计既包含了代表借力天体的离散整数变量,又包含了用来评估序列优劣和描述深空机动参数的连续实数变量,本质上属于复杂的连续-离散混合变量最优问题。借力天体的数量及深空机动次数不定,优化设计空间不确定,导致优化问题处理困难;同时,任务窗口和科学目标多样性导致相应的最优多天体飞行序列差异大,仅针对部分借力序列进行优化设计可能无法得到最优的转移轨道。而对所有借力序列遍历搜索在现实中不可行。因此本文结合两种多天体借力模型的优点并融合启发式优化算法,提出一种逐步多层嵌套优化方法。将太阳系边际探测多天体借力转移轨道设计分为3步:利用MGA模型进行初步设计、根据不同借力序列的燃料消耗排名进一步筛选借力序列、利用MGA-DSM模型进行详细设计,3步之间为递进关系,同时在初步设计中采用双层循环构架,分别优化最优借力序列和确定序列下的最优转移轨道,从而保证转移轨道设计的最优性。该优化方法的流程图如图3所示。下面将详细给出初始和精确轨道设计方法。
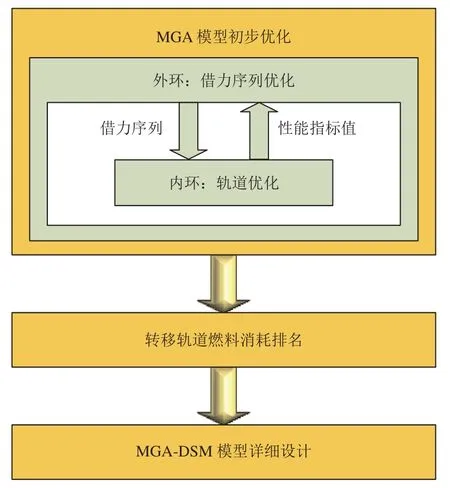
图3 多天体借力转移轨道设计流程Fig.3 Design flow for multiple gravity-assist transfers
2.1 太阳系边际探测转移轨道优化目标处理
首先给出太阳系边际探测转移轨道的优化目标,由于太阳系边际探测的目标并不是某一具体的天体,因此转移轨道优化的终端条件与常见的多天体借力转移轨道优化不同。
本文以太阳风和星际风的交界处作为太阳系边际探测目标,太阳风和星际风的相互作用从距离太阳约100 AU处的终止激波开始,向外依次还具有日球层、日鞘、日球层顶、弓形激波结构。日球层鼻尖方向就是星际风来向,在日心黄道坐标系中其方向为纬度+7.5°,经度254.5°[16],其反方向即为广阔的日球层尾部。
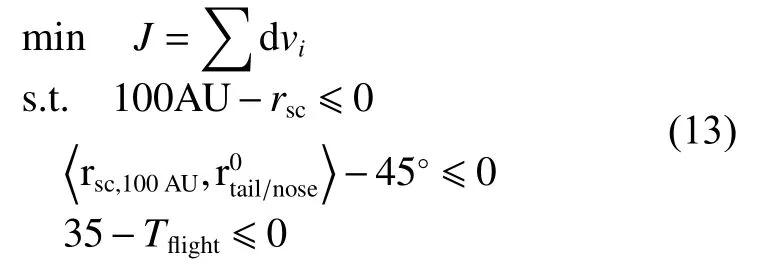
本文的问题可以描述为探测器经过多天体借力后,在一定的飞行时间后日心距大于100 AU,且与太阳系边际鼻尖或尾部方向矢量夹角小于45°,同时使飞行途中燃料消耗最小。即目标为燃料消耗最优,约束为飞行时间不大于35 a、飞行距离大于100 AU、达到100 AU时飞行器日心位置矢量与日球层鼻尖方向矢量夹角小于45°,数学描述为
同时优化的约束还包括每一次借力的借力能量,借力能量应足够大以保证探测器在借力过程中不会被借力天体所捕获

其中:0.9为一个系数,以排除临界状态;v1/i和 µi分别为第i次借力的双曲超速以及第i个借力天体的引力常数,S OIi为

其中:S MIi和mi分别表示第i个借力天体的公转半径和质量。
对于太阳系边际探测,MGA-DSM模型中省略了第 n −1段 转移过程的 Tn−1、 深空机动 ηn−1两个表变量。若地球发射和每一借力天体共 m 个 ,则有4 m个决策变量
由于太阳系边际并不是某一具体的行星,最后一次经过借力天体到达太阳系边际的弧段不是一个兰伯特问题,因此初步设计时,从地球出发至最后一个借力天体的过程采用完整的MGA模型,在最后一个借力天体借力时,采用类似MGA-DSM的借力模型,通过设计借力半径和B平面角来获得飞行器借力后的速度。
2.2 太阳系边际探测多天体借力转移轨道初步设计方法
太阳系边际探测多天体借力转移轨道初步设计采用双层循环构架,如图4所示,该构架的外层根据内层结果对借力序列进行优化,内层针对外层给定的借力序列进行轨道优化给出性能指标值。外层处理的借力序列为离散变量,因此需要采用整数优化算法,如枚举法、遗传算法、粒子群算法等;而内层处理的是时间相关的连续变量,可以采用连续优化算法,如微分进化算法等。假设借力次数上限为8次,那么共有19 173 960种不同的借力序列,显然不适合一一枚举寻找最优序列,因此本文算法外层采用成熟的遗传算法,在不遍历所有序列的情况下找到表现优秀的借力序列,而本文算法内层则采用微分进化算法对已知借力序列的轨道进行优化。
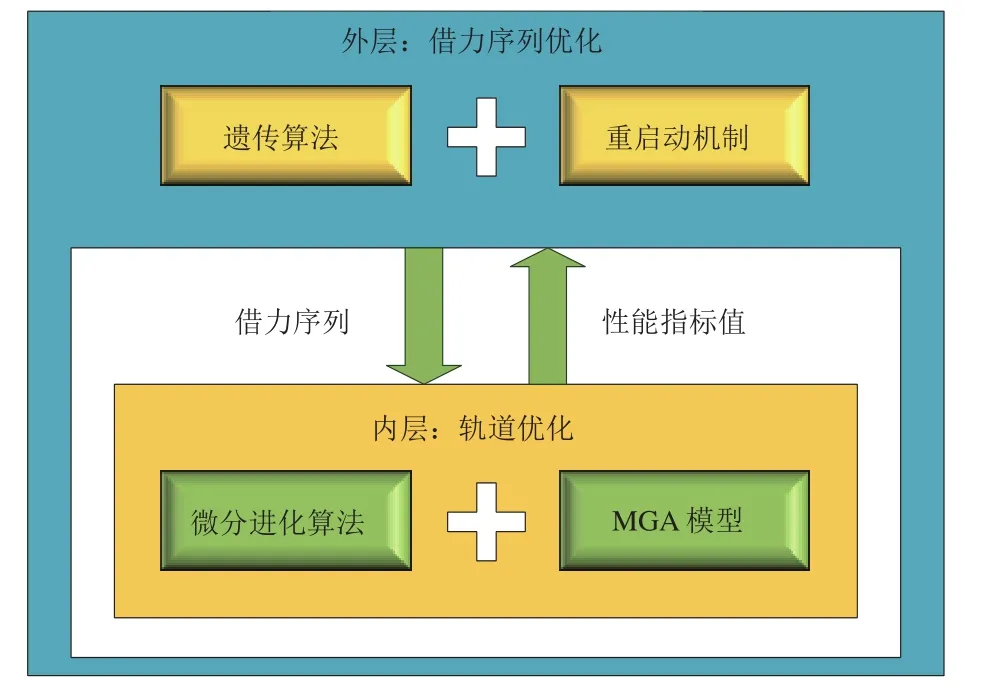
图4 多天体借力转移轨道初步设计算法结构Fig.4 Algorithm construction for multiple gravity-assist transfers preliminary design
外层所处理的借力序列优化问题中,由于借力序列既包含了不同的行星顺序也包含了不同的借力次数,因而要引入“无效基因”以使得固定的染色体长度能够表达不同长度的借力序列。若正整数1~8分别表示太阳系中水星至海王星八大行星,则可以设0、9~15这8位正整数为“无效基因”,这些数字仅用来补充染色体的长度并不表示有效的借力天体。如图5所示,和常规遗传算法生成初始种群一样,初始种群中的染色体1和染色体2每一位基因的编码均在0~15这16个整数间随机产生,但在适应度计算时染色体1和染色体2都只表示地球-火星-木星(3-4-5)借力序列;虽然有效基因仅表示3次真实借力,但整体上染色体长度没有发生改变。
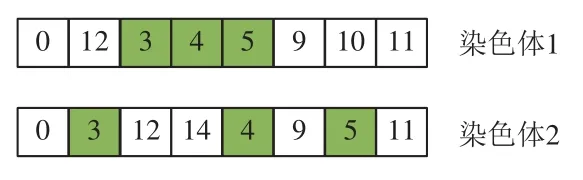
图5 染色体编码示意Fig.5 Chromosome coding schematic
此外,由于遗传算法易早熟,该算法还加入了重启动机制,当遗传算法进化到一定代数时,重新开始新一轮的借力序列优化。同时为了提高计算效率避免对同一借力序列重复优化,设置一个数据库用来记录已计算的序列的性能指标值,当再次遇到相同序列时,可以跳过内层计算而直接给出性能指标,节省计算时长。
2.3 太阳系边际探测多天体借力转移轨道详细设计方法
在太阳系边际探测多天体借力转移轨道初步设计中将生成多个借力序列对应的燃料消耗表现优秀的转移轨道,因此将可行的借力序列按照优化目标进行排序,选择初步设计结果表现最好的几个序列进行进一步详细设计。此外,如1.3节中所提到的,MGA模型处理共振借力有所缺陷,导致某些潜在的表现优良的包含共振借力的序列排名靠后。因此,在利用MGA模型给出的借力序列排名筛选时,将包含共振接力序列中排名靠后的借力序列也纳入考虑。
针对优选的多天体借力序列,采用MGA-DSM模型进行详细设计,以MGA模型中得到的各借力天体间的转移时间作为初值,在其邻域内进行搜索,同时增加借力参数和时间乘子,用来确定深空机动所需的速度增量大小。由于利用已知信息定位了解了较为精确的优化变量搜索区间,采用MGA-DSM模型的转移轨道详细优化的结果将更快收敛。
通过对优选的多天体借力序列逐一优化并重新排序,可得给定任务约束下较优的多个太阳系边际探测多天体借力序列及相应的最优转移轨道。由于在优化过程中无需指定借力序列,且太阳系边际探测方位约束作为惩罚函数在每层优化中被考虑,因此该优化方法适用于不同任务约束和目标下的太阳系边际探测多天体借力转移轨道设计。
2.4 算法性能
本报告所采用的计算资源为英特尔i7-6700K CPU,数学计算软件为Windows10系统上Matlab R2019a。
利用微分进化算法和1.1节种多天体借力MGA模型进行轨道优化(最大代数设为3 000代),包含3次、4次、5次借力的多天体轨道优化分别用时约1.6 、1.9、2.3 min。若采用相同的优化算法和1.2节中的多天体借力MGA-DSM模型进行轨道详细设计(最大代数设为50 000代),则包含3次借力的多天体轨道优化需用时49 min。
在初步设计的计算中,3次遗传算法重启动分别耗时60、39、72 min。初步设计经过172 min的计算可以给出大约包含80种借力序列的借力序列排名。遗传算法在后代进化过程中会多次计算重复的序列,由于建立有已计算借力序列的数据库,因此计算耗时主要由产生的有效的新序列的个数来决定。
3 太阳系边际探测多天体借力转移轨道设计
基于上文提到的优化方法,本文分别设计了前往太阳系边界鼻尖和尾部的多天体借力转移方案,约束飞行器在35 a内飞抵距离太阳100 AU处,与鼻尖或尾部方向矢量夹角小于45°,同时考虑“长征五号”火箭运载能力和太阳系边际探测器规模给定地球出发的发射能量C3不大于50 km2/s2。由于有飞行时间的约束,木星、土星、天王星、海王星公转周期太长(约12~165 a),不适合进行共振借力,因此在优化借力序列的过程中将包含2次及以上外行星共振借力的序列排除在外、提高优化效率。经过外行星后前往内行星借力再返回外太阳系,虽然轨道半长轴较外行星共振借力略短,但也将耗费过长的时间,因此外行星出现在内行星之前的借力序列也可以排除在外。
3.1 太阳系鼻尖探测转移轨道方案
针对太阳系边际鼻尖探测转移轨道,经过初步设计,得到了如表2所示的借力序列排名,其中正整数1~8分别对应水星至海王星八大行星。从表2可以看出,地球-金星-地球-地球-木星-土星-太阳系边际鼻尖的序列表现最好,在该模型下出发C3为13.731 4 km2/s2,且出发后无需速度增量,其具体的轨道参数如表3所示。
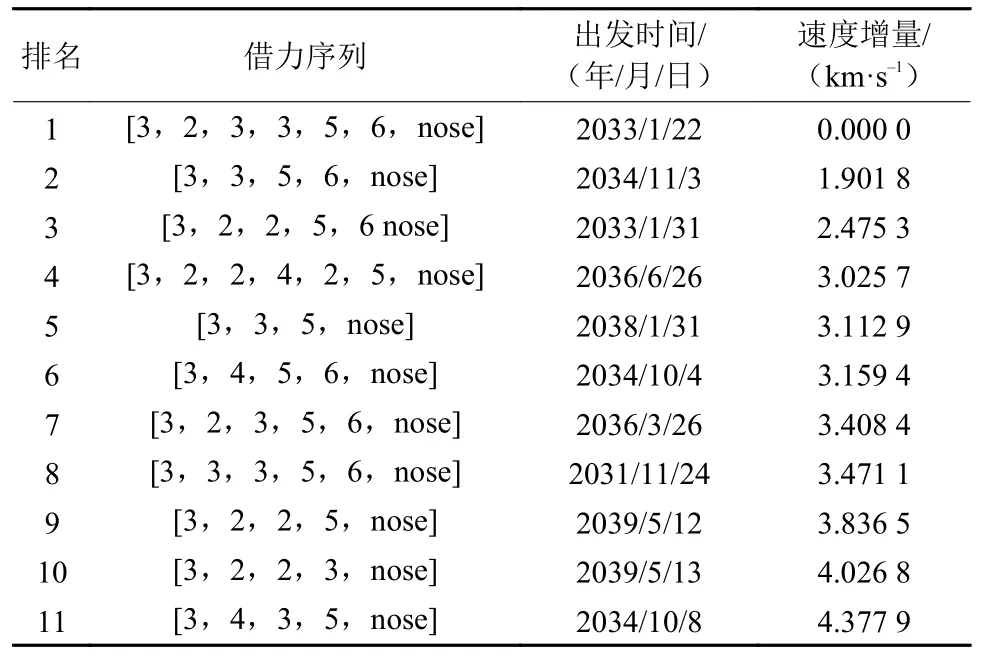
表2 太阳系边际鼻尖初步设计借力序列排名Table 2 Gravity-assist sequence ranking for preliminary design of solar system boundary nose
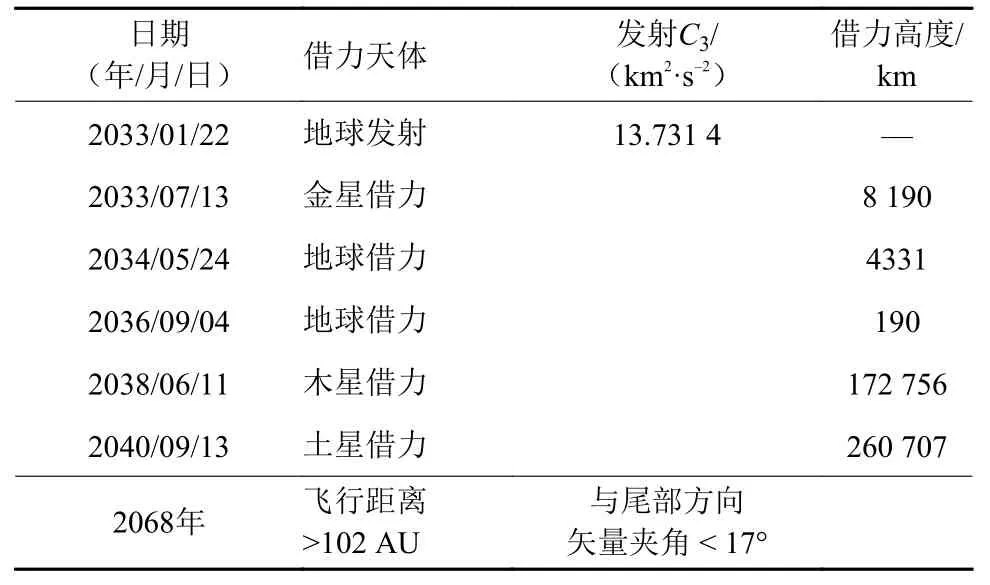
表3 地球-金星-地球-地球-木星-土星-鼻尖转移轨道参数Table 3 E-V-E-E-J-S-helionose transfer parameters
由于MGA模型下地球-金星-地球-地球-木星-土星-太阳系边际鼻尖序列在发射后无需速度增量即燃料消耗为0,因此采用MGA-DSM模型的结果与MGA模型相同,且为燃料消耗最优的序列,得到如图6所示的轨道图,其中图6(a)为图6(b)木星借力前轨道的局部放大图。
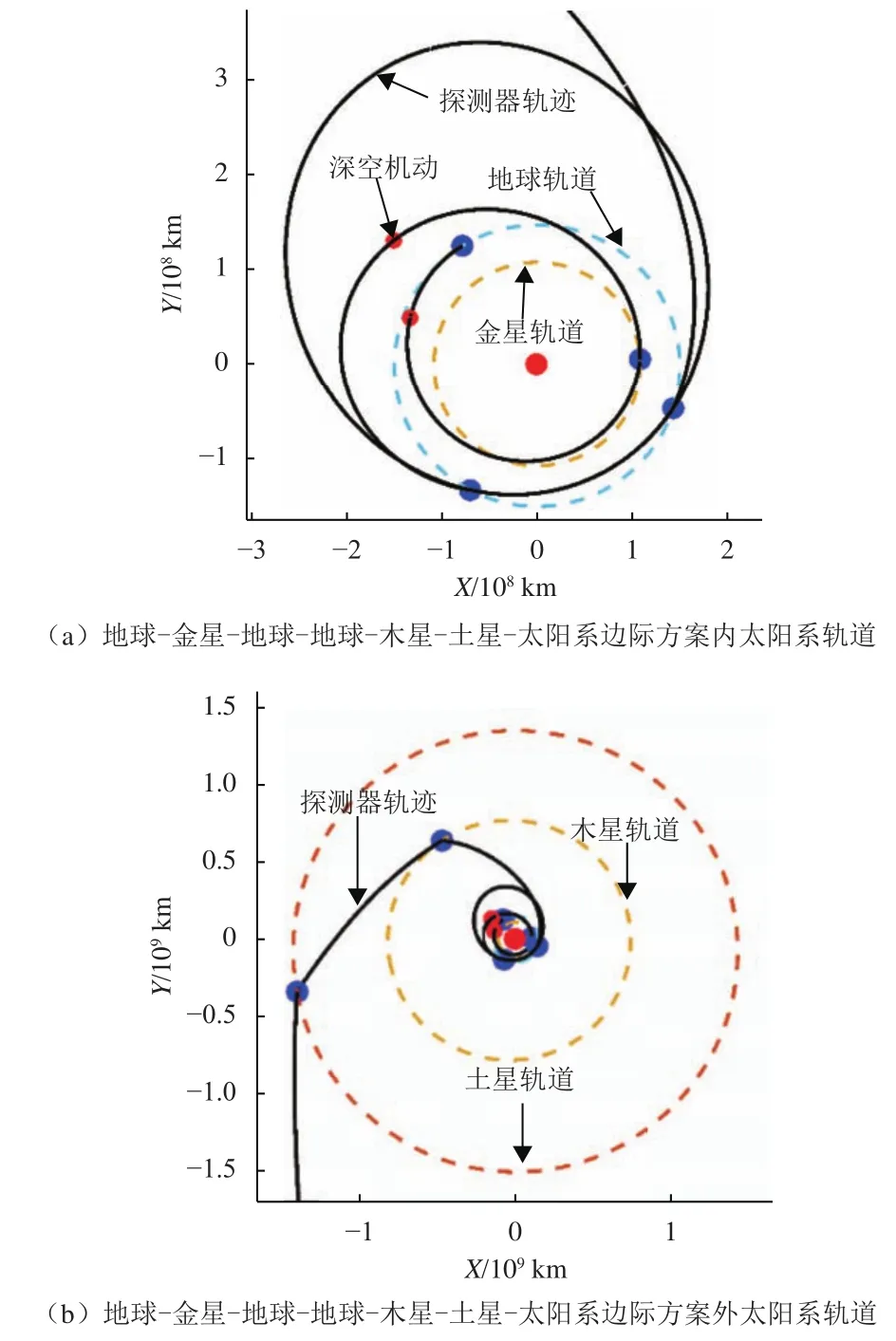
图6 地球-金星-地球-地球-木星-土星-鼻尖序列轨道Fig.6 E-V-E-E-J-S-nose transfer orbits
针对共振借力情况,MGA-DSM模型可以有效降低任务所需速度增量。如排名第二的地球-地球-木星-土星-太阳系边际鼻尖序列在MGA模型下需要约1.9 km/s的速度增量,但在MGA-DSM模型下,可以用远日点的一个小的深空机动实现第二次飞越地球时双曲超速的改变,从而代替第二次飞越地球时近地点所施加的较大速度增量。此时,该序列只需要1.006 2 km/s的速度增量,减小了0.9 km/s的速度增量,具体的轨道参数如表4所示,轨道图如图7所示。
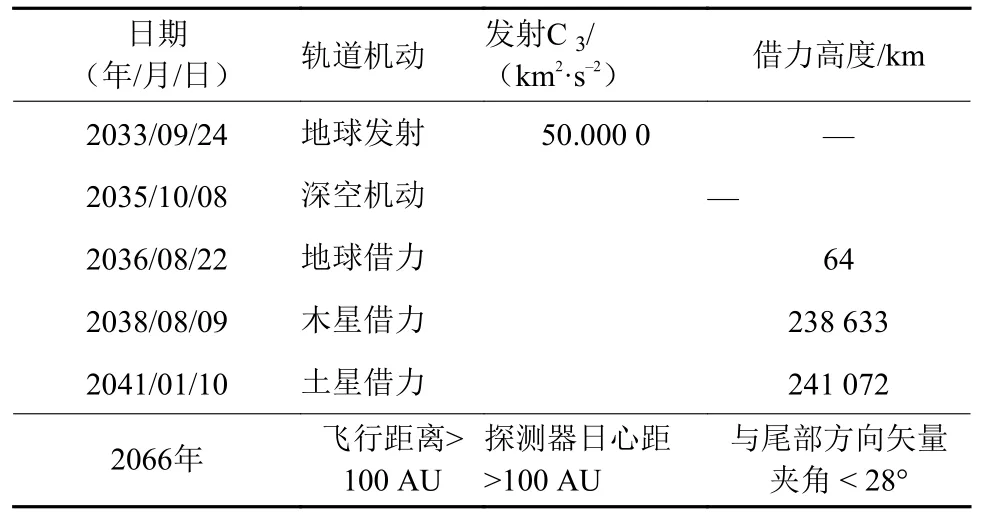
表4 地球--地球-木星-土星-鼻尖转移轨道参数Table 4 E-E-J-S-nose transfer detailed parameters
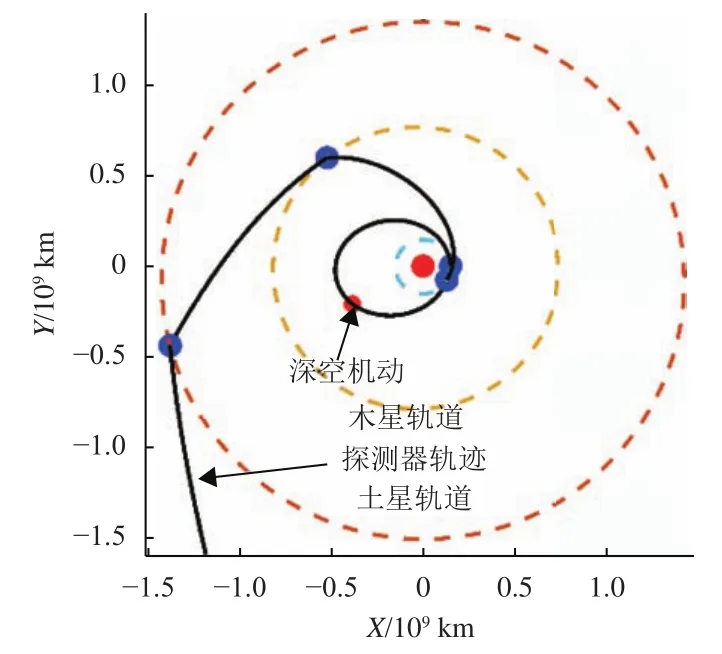
图7 地球-地球-木星-土星-鼻尖序列轨道Fig.7 E-E-J-S-nose transfer orbits
3.2 太阳系尾部探测转移轨道方案
针对太阳系边际尾部探测转移轨道,经过初步设计,得到了表5所示的满足发射能量约束C3≤50 km2/s2且任务总速度增量在5 km/s以内的借力序列排名,其中正整数1~8分别对应水星至海王星八大行星。从表5可以看出,地球-金星-地球-地球-木星-海王星-太阳系边际尾部的序列表现最好,在该模型下任务总速度增量几乎为0。
针对从表5中选择出的地球-金星-地球-地球-木星-海王星-太阳系边际尾部序列进行进一步的详细设计,其MGA-DSM模型下的轨道参数如表6所示,轨道图如图8所示。其中图8 (a)为图8(b)中内太阳系轨道局部放大。

表5 太阳系边际尾部初步设计借力序列排名Table 5 Gravity-assist sequence ranking for preliminary design of solar system boundary tail

表6 地球-金星-地球-地球-木星-海王星-尾部转移轨道参数Table 6 E-V-E-E-J-S-N-tail transfer detailed parameters
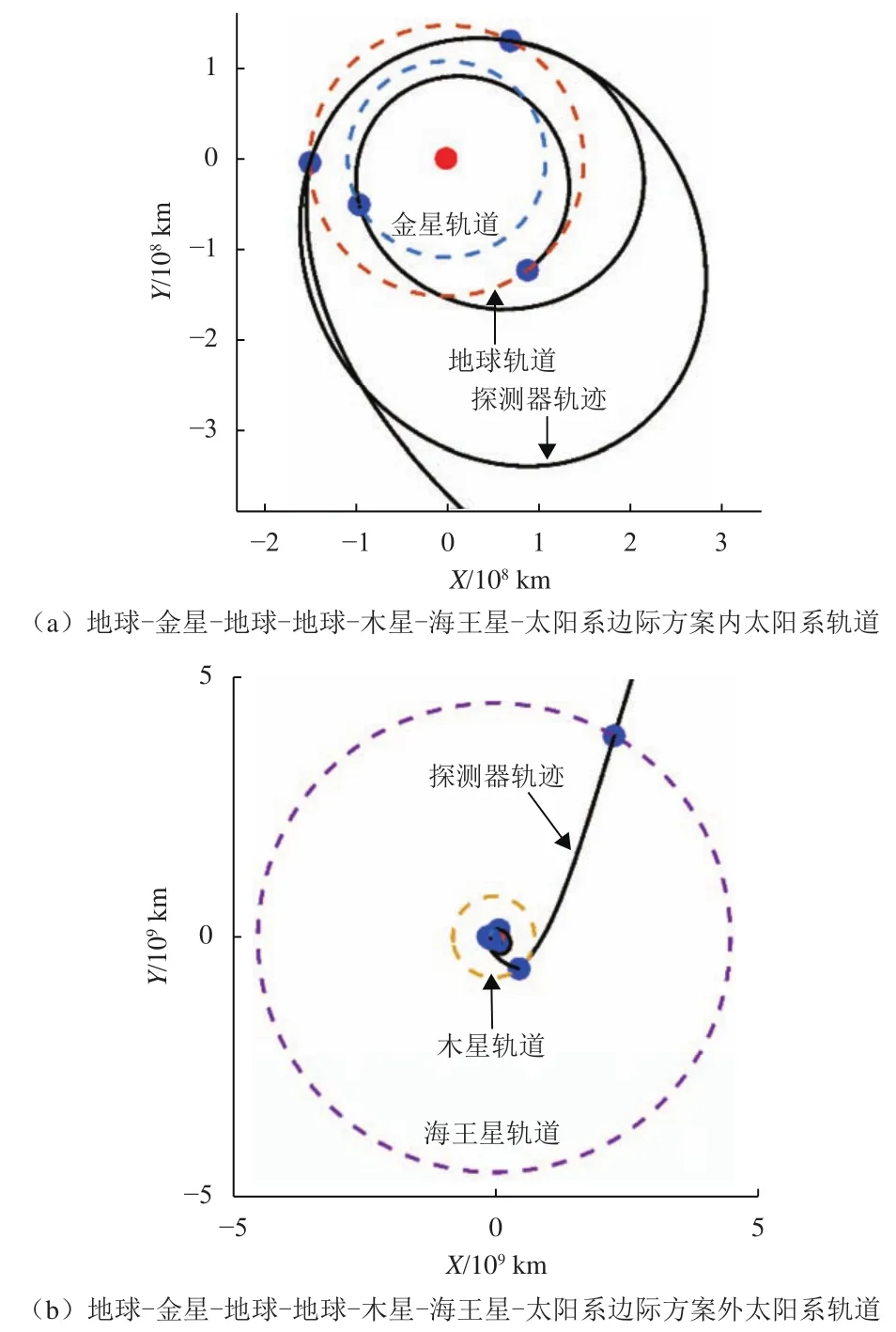
图8 地球-金星-地球-地球-木星-海王星-太阳系边际尾部序列轨道Fig.8 E-V-E-E-J-N-tile transfer orbits
4 结 论
本文针对太阳系边际探测的多天体借力目标选择与轨道设计问题开展研究,介绍了近心点机动多天体借力模型MGA模型和转移弧段中间深空机动多天体借力模型MGA-DSM,并分析了两种模型各自的优劣与适用范围。同时,研究了太阳系边际探测的约束与目标处理方法,提出了一种结合两种多天体借力模型的逐步多层嵌套优化方法,在初步设计中使用MGA模型并采用双层循环构架,分别优化最优借力序列和确定序列下的最优转移轨道,然后通过燃料消耗排名筛选借力序列,并利用MGA-DSM模型进行详细设计。该方法可实现不同任务约束下太阳系边际探测多天体借力转移轨道优化设计。最后,给出了2030-2040年针对太阳系鼻尖与尾部探测最优多天体轨道飞行序列排序。研究发现,针对太阳系鼻尖的最优多天体借力序列为地球−金星−地球−地球−木星−土星−太阳系边际鼻尖,而针对太阳系尾部的最优序列为地球−金星−地球−地球−木星−海王星−太阳系边际尾部,研究可以为我国未来太阳系边际探测方案设计提供理论支撑。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
中国医疗美容(2022年3期)2022-05-20
快乐作文(5.6年级)(2021年8期)2021-09-03
思维与智慧·上半月(2021年4期)2021-04-29
锦绣·上旬刊(2020年10期)2020-12-14
天津经济(2020年7期)2020-08-20
中外文摘(2019年3期)2019-11-12
金桥(2018年7期)2018-09-25
消费导刊(2018年8期)2018-05-25
星星·散文诗(2016年36期)2016-12-29