基于机器学习算法的交通标志图像智能识别
2021-01-28 03:35:42曹海燕张大维
微型电脑应用 2021年1期
曹海燕, 张大维
(中国传媒大学南广学院 传媒技术学院, 江苏 南京 211172)
0 引言
随着道路交通不断的增长,再加上我国经济迅速发展,机动车保有量的数量增长十分明显,尤其家用汽车数量增速最快,道路交通需求与机动车数量之间矛盾越来越突出,道路交通安全面临严峻的挑战,在此背景下出现了智能辅助驾驶系统[1-2]。智能辅助驾驶系统集成了人工智能、计算机视觉等先进技术,可以实时感知车辆周围环境,降低事故发生概率[3]。交通标志图像智能识别是智能辅助驾驶系统最为关键的内容,通过计算机视觉技术对交通标志图像进行检测和识别,然后将结果反馈给驾驶员,从而对行驶车辆进行及时控制,因此交通标志图像识别具有十分重要的社会和学术价值[4]。
交通标志图像识别从本质上讲是一种分类问题,国外一些发达国家对识别交通标志图像的研究时间早,交通标志图像识别成熟,而国内由于机动车出现时间晚,对交通标志图像识别起步晚,但由于我国对交通标志图像识别研究投入大,目前存在许多交通标志图像识别方法[5-6],当前主要有最近邻域法的交通标志图像识别方法、决策树分类法的交通标志图像识别方法、人工神经网络的交通标志图像识别方法、支持向量机的交通标志图像识别方法[7-9],这些方法均有各自的优势,但是缺陷也十分明显,如最近邻域法的交通标志图像识别时间长、实时性差;决策树分类法的交通标志图像识别速度快,但是交通标志图像的误识率极高;人工神经网络的交通标志图像识别的抗干扰能力差、结果不稳定;支持向量机的交通标志图像识别时间长、速度慢[10-12]。
针对当前交通标志图像识别过程中存在的问题,以提高交通标志图像识别准确率和识别速度为目标,提出基于机器学习算法的交通标志图像智能识别方法,与传统交通标志图像识别方法进行了仿真对照测试结果表明,本文方法的交通标志图像识别正确率得到了提高,可以满足交通标志图像识别实际要求,减少了交通标志图像识别时间,可以实现实时的交通标志图像识别。
1 机器学习算法的交通标志图像智能识别方法
1.1 交通标志图像的预处理
由于外界环境的干扰,采集原始交通标志图像存在的噪声,同时交通标志图像采集通常在户外进行,易受光照变化的影响,使得交通标志图像对比度低,各种交通标志图像尺寸不一样,因此需要对原始交通标志图像进行预处理,基本过程为:首先采用小波变换对原始交通标志图像进行滤波处理,去掉交通标志图像中的噪声,消除噪声对交通标志图像识别特征的不利影响;然后采用直方均衡算法对去噪后的图像进行增强处理,消除光照变化的干扰,提高交通标志图像的对比度,使交通标志图像更加清晰;最后对所有交通标志图像尺寸进行归一化操作,使它们具有大小相同。
综合上述,交通标志图像的预处理流程,如图1所示。
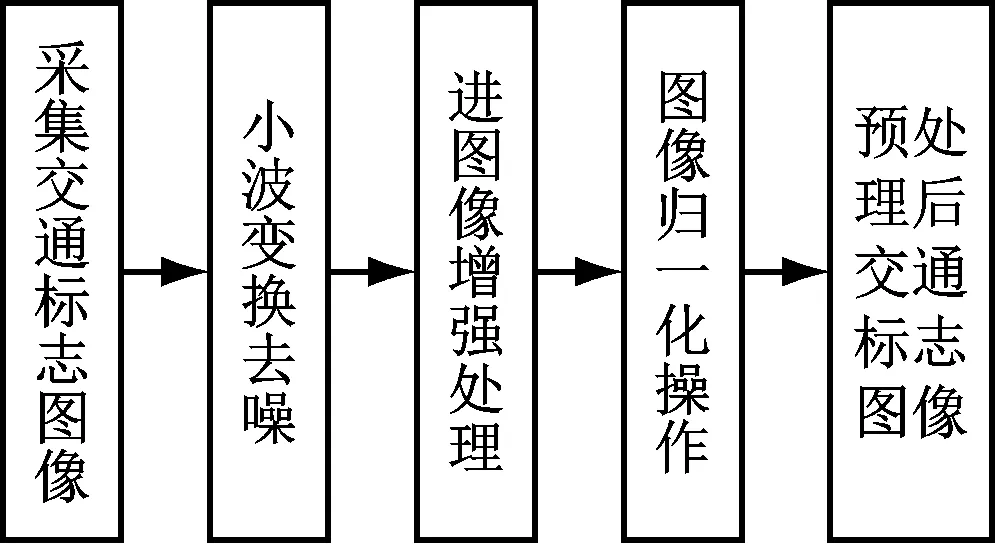
图1 交通标志图像预处理流程
对于一幅视觉效果差的交通标志图像,如图2所示。

图2 原始交通标志图像
通过预处理后,如图3所示。

图3 预处理后的交通标志图像
由图3可知,交通标志图像效果得到了明显的改善。
1.2 提取交通标志图像特征
1.2.1 交通标志图像的形状特征
方向梯度直方图特征是一种交通标志图像局部特征,可以描述交通标志图像的形状,因此本文将方向梯度直方图特征作为交通标志图像识别的一种特征,具体提取步骤如下。
(1) 对预处理的交通标志图像进行gamma标准化处理,降低图像的局部阴影,如式(1)。
I(x,y)=I(x,y)gamma
(1)
(2) 计算交通标志图像像素点(x,y)的水平和垂直梯度,如式(2)、式(3)。
Gx(x,y)=H(x+1,y)-H(x-1,y)
(2)
Gy(x,y)=H(x,y+1)-H(x,y-1)
(3)
式中,H(x,y)表示点(x,y)的像素值。
点(x,y)的梯度幅值和梯度方向,如式(4)、式(5)。

(4)

(5)
(3) 将交通标志图像划分为多个单元,统计每一个单元的梯度信息,对交通标志图像的全部像素点、梯度方向进行投影和加权,得到方向梯度直方图的特征向量。
(4) 由于方向梯度直方图的特征向量的值不一样,因此对它们进行归一化,得到归一化后的方向梯度直方图的特征向量,如图4所示。
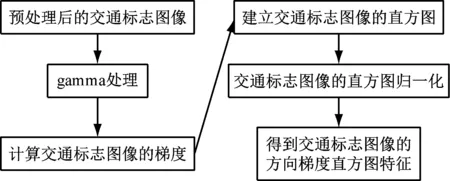
图4 方向梯度直方图特征的提取流程
1.2.2 交通标志图像的纹理特征
局部二值模式特征也是一种交通标志图像局部特征,可以描述交通标志图像的纹理分布情况,因此本文将局部二值模式特征作为交通标志图像识别的一种特征,具体提取步骤如下。
(1) 确定检测窗口,并根据检测窗口的大小将交通标志图像划分为多个单元;
(2) 计算交通标志图像检测窗口的中心像素点局部二值模式特征;
(3) 计算交通标志图像计算所有单元的直方图;
(4) 将计算所有单元的直方图连接在一起,得到交通标志图像的局部二值模式特征,并进行归一化处理,如图5所示。
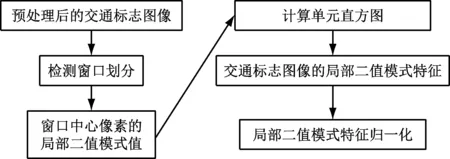
图5 局部二值模式特征的提取流程
1.3 极限学习机算法设计交通标志图像识别的分类器
极限学习机算法是一种新型的机器学习算法,采用单隐含层,与传统人工神经网络不一样,避免了反复迭代调整连接权值的过程,训练时间大幅度减少,训练效率高[13],为此本文引入其设计交通标志图像识别的分类器。
设交通标志图像训练样本集合为(xi,yi),i=1,2,…,n,xi表示输入向量,yi表示输出向量,L表示隐含层节点数,那么极限学习机算法,如式(6)。

(6)
极限学习机学习和训练的目标是输出误差最小,如式(7)。
(7)
存在一组:βi,wi,bi,满足如下条件,如式(8)。
(8)
采用矩阵表示式(8),如式(9)。
Hβ=T
(9)
(10)

(11)
1.4 机器学习算法的交通标志图像智能识别原理
机器学习算法的交通标志图像智能识别原理具体为:首先采集交通标志图像,并对其进行预处理,提高交通标志图像质量;然后提取交通标志图像的方向梯度直方图特征和局部二值模式特征,将其作为极限学习机的输入,并将交通标志图像类型作为输出;最后确定极限学习机的相关参数,并通过学习,建立可以描述交通标志图像类型和特征之间的分类器,如图6所示。

图6 机器学习算法的交通标志图像智能识别原理
2 应用实例
2.1 测试环境
为了分析机器学习算法的交通标志图像智能识别效果,对其进行仿真分析,如表1所示。

表1 交通标志图像智能识别的测试环境
在相同测试环境下,选择BP神经网络的交通标志图像识别方法和支持向量机的交通标志图像识别方法、最近邻域法的交通标志图像识别方法、决策树分类法的交通标志图像识别方法进行对比测试。
2.2 测试数据
采用交通标志图像识别数据集(German Traffic Sign Recognition Benchmark,GTSRB)作为实验对象,该数据集包括43类交通标志图像,代表性的交通标志图像,如图7所示。

图7 部分交通标志图像
2.3 测试结果与分析
采用5种方法对交通标志图像进行识别测试,统计它们的正确率和识别时间,如表2所示。
由表2可知,
(1) 最近邻域法、决策树分类法的交通标志图像识别正确率低,这是因为它们认为交通标志图像类型和特征向量是一种线性变化关系,这与实际情况相不符,虽然它们的交通标志图像识别时间短、速度快,但无法应用于实际的交通智能管理系统中。
(2) BP神经网络和支持向量机的交通标志图像识别正确率要高于最近邻域法、决策树分类法,这是因为它们属于传统机器学习算法,可以较好描述交通标志图像类型和特征向量是非线性变化关系,但它们的交通标志图像识别时间长、效率低,无法满足交通智能管理的实时性要求。
(3) 本文方法的交通标志图像识别正确率要明显高于当前其它方法,而且识别的速度快,获得了整体性能更优的交通标志图像识别结果,主要是由于引入极限学习机算法加快了交通标志图像识别的训练速度,解决了当前交通标志图像识别过程中存在的难题,对比测试结果验证了本文交通标志图像识别方法的优越性。
3 总结
为了减少交通标志图像识别错误率,加快交通标志图像识别速度,在分析当前交通标志图像识别方法的基础上,提出了基于机器学习算法的交通标志图像智能识别方法,结果表明,交通标志图像识别正确率较高、结果稳定、可靠,为交通标志图像识别研究提供了一种新的工具。
猜你喜欢
东方少年·布老虎画刊(2023年12期)2024-01-01 08:51:05
汽车实用技术(2022年9期)2022-05-20 06:04:02
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
测控技术(2018年10期)2018-11-25 09:35:26
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
自动化学报(2018年2期)2018-04-12 05:46:21
制造技术与机床(2017年4期)2017-06-22 11:17:32
小天使·一年级语数英综合(2016年8期)2016-05-14 19:43:16