生产平台大型膨胀弯落物保护系统安装研究
2021-01-28 03:36:28张亚雷刘耀江卢维强黄佳瀚薛大智
中国新技术新产品 2020年23期
张亚雷 刘耀江 卢维强 黄佳瀚 薛大智
(深圳海油工程水下技术有限公司,广东 深圳 518054)
0 引言
海洋平台作为海上石油勘探、开采、处理和输送的重要设施,具有重大的国民经济意义。海洋平台吊机起吊货物以及供货船舶装卸货物等作业活动频繁,由于超载起升、操作人员的判断及工作失误等原因,可能引发吊装物体意外坠落事故[1]。落物既可能直接坠落在甲板上,也可能坠落在海中,海底管道在平台附近布置密集,防护较少,坠落在海中的物体可能对水下管道、立管和设备造成损害,直接影响平台和油田系统安全生产,产生经济损失。海洋工程本身具有非常高的风险,一旦出现恶性事故,将造成巨大的经济损失,严重污染环境。
鉴于此,在海洋平台周围水下管道和设备安装落物保护系统,可以有效降低海洋平台落物对水下管道和设备造成损伤的风险,使平台和油田系统的安全运营得到保障。
1 项目概况
南海某气田的主要生产管线为2根0.558 m的海底管道,该气田中心平台海底管道与平台立管底部连接的膨胀弯和一般的平台底部水平膨胀弯不同,其为大型、立式、三维走向的膨胀弯,是平台的关键节点,一旦发生落物碰撞该膨胀弯并造成海管损伤,极易导致油气泄露或平台停产。因此考虑到平台吊机日常作业的落物风险,需要在该膨胀弯上部安装落物保护系统,以保证设施和生产的安全。鉴于该大型膨胀弯的长度(约100 m)和高度(约10 m)较大,且2根膨胀弯既靠近,走向却又不同,所以膨胀弯保护系统考虑分段设计和制造,并在水下进行连接安装。此类保护框架安装在国内尚属首次,该文主要描述膨胀弯落物保护系统的海上安装过程和注意事项。
2 落物保护系统施工方案的确定
2.1 落物保护系统的组成
在平台落物保护系统海上安装项目中,落物保护系统是由分段的19个保护框架组成的,如图1所示。保护框架信息见表1。
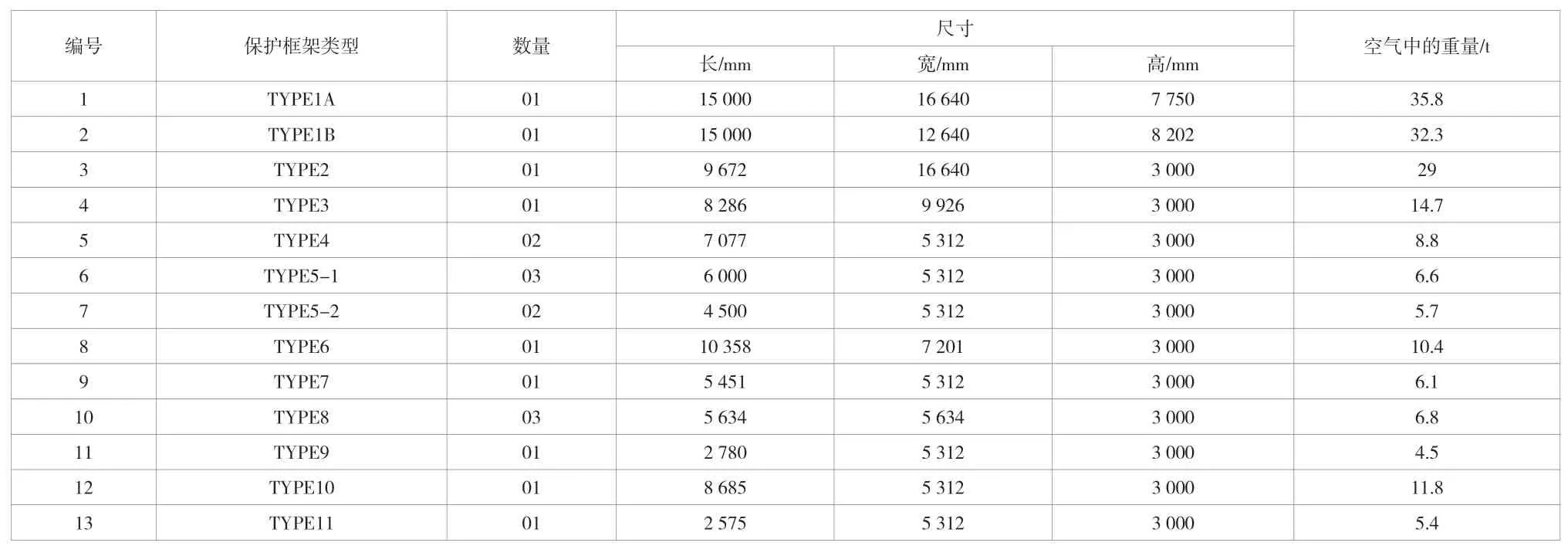
表1 保护框架数据表
2.2 落物保护系统施工方案
针对项目自身的特点,选择合适的、可行的施工方案是整个工程的重中之重。该项目的特点是:水下200 m 左右,属于较深水,因为国内无法利用饱和潜水系统进行安装,只能采用作业级水下机器人进行安装就位,所以该项目所有保护框架设计均带有水下机器人操作把手,可以利用作业级水下机器人进行保护框架安装。
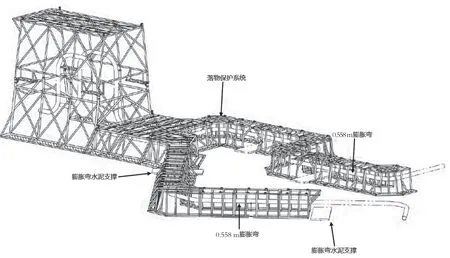
图1 保护框架安装效果图
落物保护系统施工方案有3个:1)19个保护框架分别预安装吊装索具。2)主作业船和运输驳船共同将保护框架运输至作业现场。3)在作业现场利用作业级水下机器人依次将保护框架安装到位。
3 落物保护系统海上安装
该项目保护框架安装位置处于平台附近,需要选用至少具有船舶动力定位系统(DP)的、配置2台作业级水下机器人的船舶作为主作业船,并且主作业船需要长时间在平台附近作业,与平台有较高的碰撞风险,所以在平台上安装激光反射板,主作业船驾驶室可以实时接收平台发来的信号,以此来确定主作业船与平台之间的距离,可以时刻保证主作业船与平台任何突出部位保持10 m的最小安全距离。
对于水下结构物的安装,最主要的是要满足精度要求。在该项目中,待保护管段存在多段弯曲转折处,保护框架需要按照一定的安装顺序将限位钩、销连接成一体,如果前面的保护框架安装误差较大,会导致后续保护框架无法安装;同时,由于平台桩腿和水泥支撑等结构物也会限制保护框架的安装空间,所以需要保持较高的安装精度。虽然长基线定位系统具有很高的定位精度,但是考虑到布置长基线基阵需要较长的时间,工期和项目成本会增加很多,最终没有选用长基线定位系统。超短基线定位系统与长基线定位系统相比定位精度较低,但是配合一些定位辅助结构,在安装过程中也可以得到充分的应用,如图2所示。
定位辅助结构贴近平台桩腿放置以后,就可以进行保护框架安装。
在安装保护框架类型1A、类型1B和类型2时,由于这3种保护框架质量分别为35.8 t、32.3 t和29 t,重量较大,并且其中一条管线处于生产状态,有较大的安装风险,因此需要平台停产,将管线内压力泄压至低于20 bar。另外,由于水下机器人通过水下机器人操作把手不能很好地控制这3个保护框架的艏向角,因此设计了水下机器人对接面板,如图3所示。利用水下机器人将对接头插入并锁定对接面板中控制保护框架的艏向角,水下机器人对接头如图4所示。
准备工作完成后,主作业船靠近运输驳船,吊机吊钩连接保护框架预安装索具,起吊到距离运输驳船甲板5 m的位置,主作业船远离运输驳船100 m,保护框架穿过飞溅区下放至水深30 m位置,水下机器人靠近观察保护框架,继续下放至距离海底20 m位置,开启吊机升沉补偿,移船至保护框架安装位置上方,继续下放保护框架,安装到位,下放速度为0.2 m/s,水下机器人通过对接面板控制保护框架的艏向角,以保证保护框架的安装精度。
保护框架安装就位后,需要解除保护框架连接索具。为了方便水下机器人操作,保护框架吊装索具通过水下机器人操作钩与吊机,操作卸扣与保护框架相连以达到解除连接的目的。在实际施工中,水下机器人操作钩和水下机器人操作卸扣的应用,很大程度地缩短了海上施工工期,节省了项目成本。
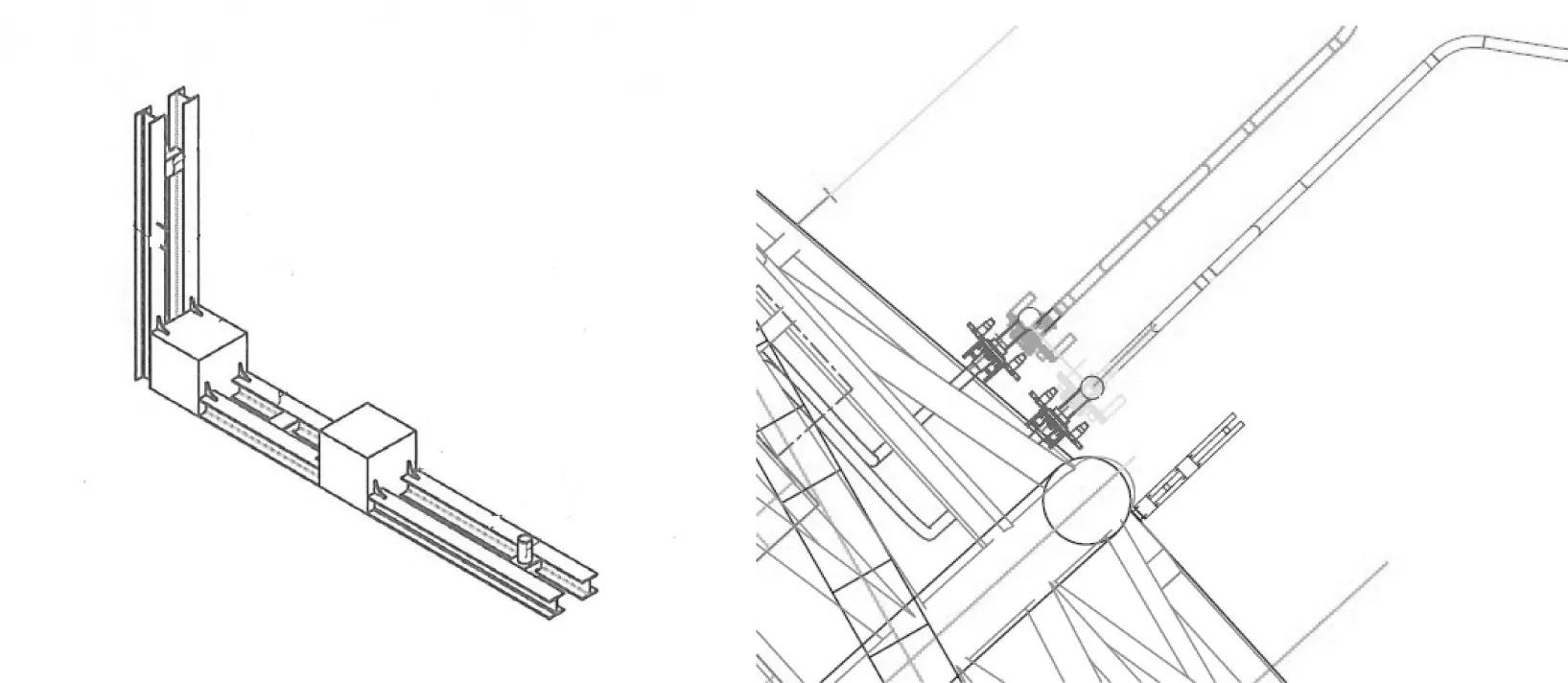
图 2 保护框架安装定位辅助结构

图3 水下机器人对接面板

图4 水下机器人对接头
4 保护框架安装风险
4.1 其他类型保护框架安装风险
其他类型保护框架(保护框架类型1A、1B和类型2除外)距离平台很远,且尺寸及质量较小,安装时有较小的风险,可以采取以下4种措施控制其他类型保护框架的安装风险:1)细化其他类型保护框架的安装程序,做好与现场施工人员的技术交底,识别其他类型保护框架安装过程中可能出现的风险点,对风险点进行重点控制。2)设置合理的保护框架吊装安全操作区域和保护框架安装船舶移位路由。3)与平台做好沟通,作业许可证、班前会及其他安全措施和文件准备齐全,并严格按照平台和船舶施工作业的安全要求和流程进行作业。4)在保护框架上设计水下机器人操作把手,由水下机器人通过操作把手控制保护框架的艏向角,以保证保护框架的安装精度。
4.2 保护框架类型1A、1B和类型2安装风险
保护框架类型1A、1B和类型2距离平台很近,且尺寸及质量较大,安装时有较大的风险,除了采取4.1中(1)、(2)和(3)所描述的控制措施,还需要采取以下2种措施控制保护框架类型1A、1B和类型2的安装风险:1)由于保护框架类型1A、1B和类型2安装时风险较大,安装时需要平台暂时停产;2)设计保护框架类型1A、1B和2的对接面板,由水下机器人通过对接头控制保护框架的艏向角,以保证保护框架的安装精度。
5 结语
此次在200 m左右水深的落物保护系统安装作业圆满完成,深水操作水下机器人进行结构物安装得到实练,水下机器人操作把手、水下机器人对接头、水下机器人对接面板、水下机器人操作钩和水下机器人操作卸扣等便于水下机器人操作的设计和工具得到了充分应用,为今后平台附近海底管线保护提供了新的解决方案。
猜你喜欢
思维与智慧(2023年19期)2023-06-26 03:17:52
机械工业标准化与质量(2021年10期)2021-11-19 09:17:52
沈阳大学学报(自然科学版)(2021年5期)2021-10-15 12:34:16
小雪花·成长指南(2021年7期)2021-09-06 10:46:27
化工设计通讯(2020年3期)2020-01-14 13:01:58
模具制造(2019年4期)2019-06-24 03:36:50
中国公路(2017年19期)2018-01-23 03:06:37
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
化工设计通讯(2017年12期)2017-03-06 07:55:11
化工设计通讯(2017年12期)2017-03-06 07:55:11