椰果采摘装置改良设计
2021-01-25 11:58张梓谦程清伟卓有成宋宇航
消费导刊 2021年3期
张梓谦 程清伟 卓有成 宋宇航
华南理工大学广州学院
一、研究背景及意义
目前,国内椰子产量主要看海南,海南就文昌市而言,已经拥有海南省最大的椰子种植面积,然而尽管政府大力宣传,但进行采摘的方式非常有限,年产12亿的海南,基本都是使用人工采摘,危险,不安全,工人劳动强度偏高。
学术研究方面,海南大学研发出了液压机械臂采摘机,通过液压伸缩机械臂控制切割刀的方式来采摘椰果;印度Akshay Prasad Dubey设计了一款椰子树攀爬收获机器人,该机器人由上下两个环形结构组成,交替抱树实现机器人的上下攀升;山东农业大学机械与电子工程学院研制了一种爬树修剪机器人,如图1所示。
但是在以上的机器当中,都存在着一些如机器过于庞大或者未能解决夹紧树干的问题,因此,结合人们对此的需求,本论文设计一款椰果采摘车来避免人力劳动强度大具有重大意义。

图1 一种爬树修剪机器人
二、椰果采摘车结构设计
本装置主要由两部分组成,一是机械部分,二是电子控制部分。该装置四个三相无刷直流电机与车轮一体的轮毂电机作为驱动装置,四个电机轮保证了足够的爬升动力利用四个机械手进行椰果采摘。
椰果采摘车的工作原理:内环臂、外环臂、伸缩机构,内环臂呈筒状且用于套设在树干的外周,外环臂包括两个以上的圆弧状的外环板,外环板沿内环臂的中心轴周向环绕设置,各个外环板分别通过伸缩机构连接于内环臂的外部,且伸缩机构能够伸缩使外环板沿内环臂径向移动可伸缩外板的设计使得本装置适用于爬行各种直径大小不同的椰子树,在爬行过程中根据压力传感器检测的压力值可以随时调整外板伸缩量,以保证轮胎对树干的正压力达到所需值。利用四组气压杆卡住树干的方式来达到在任意高度停留采摘的目的。弹簧气缸的应用,一方面可以调节外板伸缩量,另一方面可以起到一定的避震作用,减小爬行过程中的产生的震动。椰果采摘车结构简单、能够实现稳定地攀爬采摘椰果。
椰果采摘车整体结构主要由爬行系统和椰果采摘系统组成,椰果采摘车装置图如图2所示。
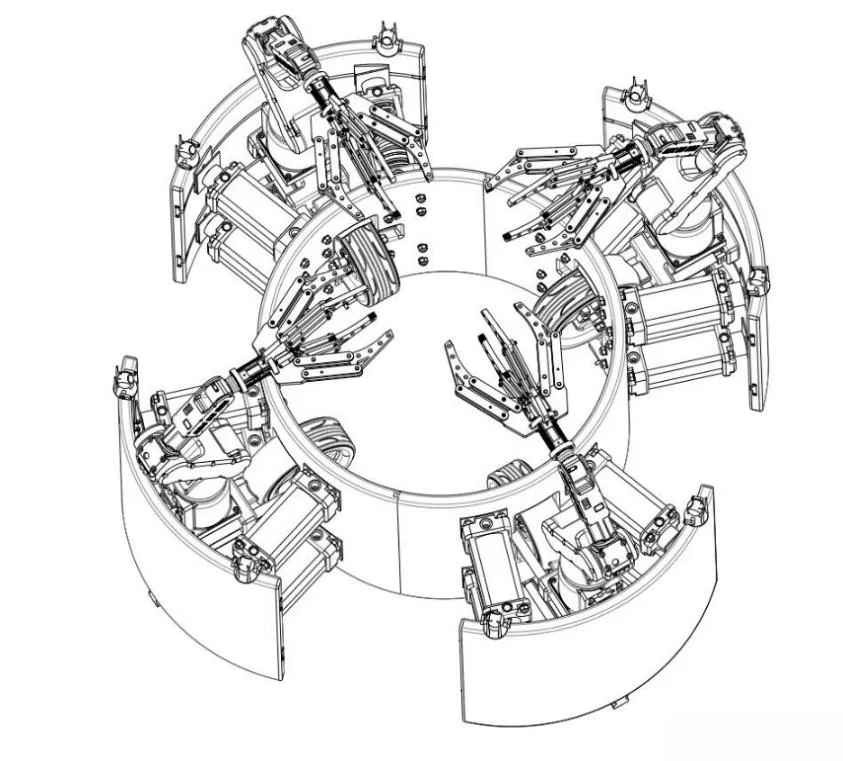
图2 整体结构图
三、对卡槽式可拆卸内板的要求及其对采摘装置的要求
内板采用两个半圆弧形板组成,两者通过卡槽方式配合,既方便拆卸、组合,又可以承受弹簧气缸提供的较大的径向拉力。圆弧型内板的直径大于椰子树的最大直径,适合攀爬直径大小不一的椰子树,可拆卸内板部分有限元分析如图三所示。圆弧型的设计使得装置整体更加美观,结构更加紧凑。通过对装置受力较大得零部件进行网格划分及静应力仿真分析,经验证,本装置满足预期设计要求。
采摘装置主要由机械手,机械爪和机械臂组成。机械爪采用气缸驱动,能够根据单片机的控制自由调节机械爪地张开角度,实现了采摘各种大小地椰果的功能。气动机械式传动的机械爪降低了控制难度,简化了采摘方式。机械臂设计共有四个自由度,整个装置共有四个机械臂,均匀分布在四周,能够无死角地对椰果进行采摘。

图3 有限元网格划分
四、椰果采摘电控控制
电子控制部分原理:首先控制部分必须根据hall-sensor感应到电机转子目前的位置,然后按照定子绕线决定开启或关闭换流器中功率晶体管的顺序,如inverter中的ah、bh、ch以及al、bl、cl,使电流依序流经电机线圈产生顺向或逆向旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时针/逆时针转动。当电机转子转动到hallsensor感应出另一组信号的位置是,控制部又在开启下一组功率晶体管,如此循环电机就可以依同一方向继续转动直到控制部决定电机转子停止则关闭功率晶体管或只开下臂功率晶体管:要电子转子反向旋转则功率晶体管开启顺序相反。
当电机转动起来控制部会再根据驱动器设定的速度及加/减速率所组成的命令command与hall-sensor信号变化的速度加以对比在来决定下一组开关导通以及导通时间长短。速度不够则开长,速度过头则减短,次部分工作就有pwm来完成。
五、创新应用
椰子树采摘首先需要的是攀爬到一定高度进行对应的采摘工作,故椰果采摘车作为一个智能化机器,使用期间能够让机器以一定的速度与负载,通过遥控控制机器上升到椰果采摘范围,并在爬树期间能够对树干大小进行监控来让椰果采摘车进行对应调节,适应树干大小。
因此,该机器能解决目前椰果采摘中存在的效率低下,成本较高及危险系数比较大等的问题。近年来科技发展迅速,农业林业正朝着机械化,自动化方向快速发展,但是椰果采摘相关人士一直担忧如何解决椰果采摘的问题,那么椰果采摘车将发挥它该有的作用。
猜你喜欢
好孩子画报(2022年11期)2022-05-30
小聪仔(科普版)(2020年7期)2020-11-24
小聪仔(科普版)(2020年7期)2020-02-01
小聪仔(科普版)(2020年7期)2020-02-01
模具制造(2019年4期)2019-06-24
模具制造(2019年4期)2019-06-24
模具制造(2019年4期)2019-06-24
现代装饰(2018年12期)2018-12-29
周末·校园文学(2018年1期)2018-02-06
红蜻蜓·低年级(2014年8期)2014-10-20