
群体智能无人专用车系统导航技术研究
2021-01-22 10:33:45宋朝忠,钟应鹏
今日自动化 2021年12期
关键词:系统
宋朝忠,钟应鹏

[摘 要]因为产业智能及无人化将无人驾驶技术视为产业升级的关键手段,所以大量装备制造产业公司开始接触并逐渐开设项目进行无人驾驶设备研发。农机、货运、清扫等行业都是自动驾驶方案业务的目标客户。此项目开发完成后,装备制造产业公司可基于无人系统与多家不同领域的装备制造商签订合作协议,实现群体智能化改装方案销售;随着无人专用车系统的成熟和推广,其将承接更多的无人驾驶改装方案的开发任务。文章以此为基础进行探讨,以期为其他学者提供参考。
[关键词]群体智能;无人专用车;系统;导航技术
[中图分类号]TO271 [文献标志码]A [文章编号]2095–6487(2021)12–000–03
Research on Navigation Technology of Swarm
Intelligent Unmanned Special Vehicle System
Song Chao-zhong,Zhong Ying-peng
[Abstract]Industrial intelligence and unmanned technology regard unmanned driving technology as a key means of industrial upgrading. A large number of equipment manufacturing industry companies have begun to contact and gradually set up projects for the research and development of unmanned equipment. Industries such as agricultural machinery, freight transport, and cleaning are all target customers for the autonomous driving solution business. After the development of this project is completed, it can sign cooperation agreements with many equipment manufacturers in different fields based on the unmanned system to realize the sales of group intelligent modification solutions; as the unmanned special vehicle system matures and promotes, it will undertake more unmanned vehicles. The task of developing a human-driving modification program. The article will conduct in-depth discussion on this basis in order to provide reference.
[Keywords]swarm intelligence; unmanned special vehicle; system; navigation technology
1 导航定位系统分析与设计
要想一个无人专用车在道路上可以安全行驶,设定好导航定位系统是非常重要的。导航定位系统从车辆行驶开始直到车辆到达标准地点,这期间所有的行程位置都务必是可知的,并且可以被用户准确无误地查询到。因此,设定智能无人专用车的导航定位系统,对其进行系统分析与设计是极其重要的。而这就需要应用到无线定位技术准确地核实车辆行驶过的地点,并且在特殊情况下可以实时跟进与追踪。然而,目前无线定位系统还没有绝对完善,其主要包括视觉行驶定位系统以及超宽带定位系统(ultrawideband,UWB)等。
1.1 常用定位系统在无人驾驶导航定位中的分析
1.1.1 卫星定位
无人驾驶领域的定位导航方法有GPS定位、卫星导航、惯性导航、激光雷达定位导航以及视觉定位导航等。GPS定位系统使用的测量方式是三角测量,即通过测量当前位置距离3个不同坐标的距离时,就可以定位智能无人驾驶汽车在行驶过程中的当前位置。总得来说,GPS定位系统主要由卫星、地面控制系统和用户设备3部分构成。卫星分布在世界各地的控制站,分布范围广泛。GPS定位系统存在2个问题:在信号较差的地方会影响其精度,更新频率较低(10次/s),这对快速移动的无人驾驶车辆会造成很大的误差。一辆以60 km/h速度运行的汽车,在0.1s内造成的误差接近2 m。这在使用卫星定位中的图像定位时,容易导致定位点信号丢失或容易受到干扰,使车辆位置产生偏差,因此,不能只针对目前以新型卫星定位图像移动定位系統应用为主的一辆无人驾驶车辆直接进行卫星图像定位。
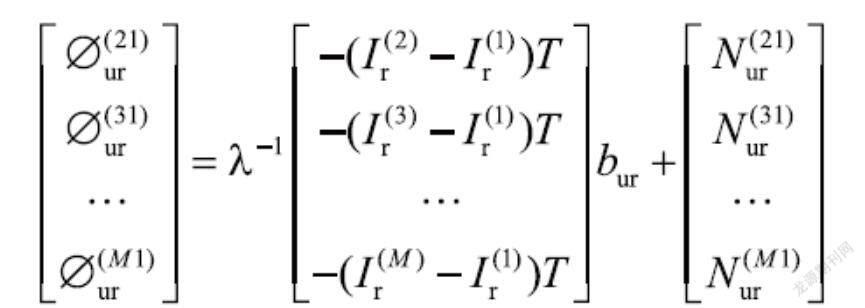
厘米级差分高精度定位的观测方程式集中在一起可组成一个如下的矩阵方程:
其中M-1个相互独立的双差载波相位测量值表达为等式左边,各个双差周整模糊度值Nur,基线向量bur就能从该方程中求解。
1.1.2 惯导定位
要了解什么是惯性导航,首先需要将这个词组拆分成两个部分,即导航+惯性。导航解决了人们从一个地方到另一个地方的方向问题。惯性,最开始源于牛顿力学,是指物体具有保持其运动状态不变的属性。具有物体运动状态信息记录的功能。而其位置信息可以说就是通过加速度信息积分得出的,可以算作是一个“副产物”。惯性导航具有自备性及可靠性。即惯性导航在使用过程中,不需要依赖外界帮助就能很大程度上完成定位工作。例如太阳黑子爆发就有可能影响卫星信号的接收,但是对于惯性导航来说,其受到的干扰很小。并且具备自备性的导航设备,只有惯导一种。
1.1.3 视觉里程算法定位
相比GPS的被动定位和对有源信号的需求,视觉SLAM更注重实现无人车对未知无源环境的主动感知,实现自身实时定位和路径规划,更好地完成实时避障和自动导航任务。基于智能无人驾驶车辆的实用性来说,相比昂贵的激光雷达,视觉传感器具有更低的构造成本和更丰富的信息采集量,具有体型小,便于安装配置的优势。
1.1.4 超带宽定位
超宽带定位是一种广泛使用了提高报文信息到达率和时间差的新型移动无线通信定位技术。用这种UWB定位方式对其进行标准定位,需要一个被标准定位的通信终端、一个普通参考定位基站以及至少3个普通参考基站。这个新的UWB定位终端就被称为一个UWB定位标签(tag),UWB标签定位使用方式设计示意图如图1所示。
使用每个参考UWB基站标签进行每次标签数据定位时,经过一系列的处理,经过标签数据库的解析,UWB到各个基站参考者到基站的标签数据没有时间差,当标签数据进行解析计算后得出来后的时间差数据中的标签数量最小长度大于或数据长度最大等于3 h时,可直接选择利用数据计算公式。
建立四元二次微分方程标签组,解析计算方法求得了UWB 4个标签的交点位置。
UWB基站定位的位置精度在厘米数量级,能够完全满足很多无人驾驶智能车辆对基站定位的各种需求。UWB基站定位这种方式高度完全依赖整个UWB基站,建设过程成本高昂,在很多无人驾驶智能车辆中不一定建议单独安装使用,而UWB基站定位这种方式用来进行基站定位。
1.2 无人驾驶导航定位设计
本文分析使用捷联卫星惯导定位、捷联车和惯导卫星定位、机器驾驶视觉学和里程碑计算法惯导定位和捷联UWB惯导定位4种系统方式相互联结合的惯导定位系统方式,能够同时使一辆无人驾驶车辆在各种高速道路上实现高标准精度惯导定位。将卫星导航定位系统与惯性导航系统和视觉导航系统等联合进行使用,共同作用于无人驾驶车的行驶过程中,是最优的无人驾驶导航定位设计方案。这些定位导航系统经过一系列的改进与融合应用,能够从很大程度上上取长补短,避免了各自的缺点,融合成一个集成型的导航定位系统,如此应用与智能无人驾驶汽车上,增加行驶的安全保障。将卫星导航系统与视觉导航想组合应用,可以从很大程度上通过算法的数据分析,确定出行驶过程中的前后方车辆的运动情况等因素,并且对其进行识别,可以从很大程度上避免了智能无人驾驶汽车的交通安全事故的发生,保证了交通安全。然而,在信号不通畅的地方,如底下隧道,如果单纯使用卫星定位系统进行智能无人驾驶汽车的定位工作,是不可靠的。因为卫星自动定位系统可能会从很大程度上失去智能无人驾驶汽车的信号源,从而对智能无人驾驶汽车的准确位置不能精准进行定位。因此,可以让UWB卫星定位系统与其融合,可以从很大程度上让智能无人驾驶汽车的定位更加准确。在此种汽车混合自动定位应用模式下,无人驾驶车辆系统能够轻松实现车辆持续高速低精度混合定位。汽车混合自动定位系统示意如图2所示。
2 智能车系统设计
为了有效实现汽车无人驾驶自动车辆从目标起始指定位置自动加速行驶并直至到达目标指定位置,无人驾驶自动车辆系统要充分应用自动驾驶定位导航、路径路线规划、运动姿势决策和速度控制等功能,對系统模块进行各种模块化架构设计,无人小车驾驶硬件控制系统总体框图设计如软件图3所示。
2.1 选择主控芯片
主控系统模块器件芯片外设器件是用于实现汽车无人驾驶自动操控系统车辆的重要一个核心部件,需要同时使用结合外围汽车主控模块器件,因此,选择的汽车主控模块芯片外设器件应必须同时具有一个新的fsmc总线接口协议串行接口作为通用汽车自动主控系统模块外设芯片。
2.2 小车系统电源设计
电机小车驱动系统的电压为12 V,屏幕显示电源工作电压为5 V。因此,小车驱动电池就是采用12 V输出电压进行输出的小车电池,以便提供给小车系统各个电源模块同时使用。并且其最大功率输出投入电流设定为1.5 A,最大功率输出投入功率分别设定为7.5 W和4.95 W,经过对两款小车驱动系统电源功耗情况进行综合分析我们可以明显发现,两款小车电源控制芯片同样能够为整个小车系统提供一个足够的最大功率投入输出,并且具有一定的最大功率输出裕量。
2.3 定位系统设计
该自动定位管理模块的当前卫星定位精度信息范围约2.5 m,首次上车输入卫星定位后的持续时间定位精度为32 s。自动定位管理模块在运载车辆首次上车完成通电后,会自动对其文件进行定位文件格式初始化,初始化定位工作进行完成后,定位数据会被传送给电脑,车载电脑按照相同或与其对应的协议标准解码格式对其进行文件解码后并计算当前定位精度数据,解码后的计算定位工作进行完成后再由车载电脑自动分析获得了该模块车辆的当前各个定位点的位置精度信息。
机器人的视觉图像通过各种摄像头接口,可以同时采集不同的图像信息讯号,而所采集的图像讯号及颜色深度应具有高分辨率。以利于提高对物体重要特征的辨识度,降低由各种不同图像系统信号采集而出现的图像信号误差。本文研究的系统软件设计主要采用了一款基于ovcmos多种图像信号传感器及其接口制作的多种不同摄像头输出信号系统ov5640。其最大输出功率可同时输出多个不同像素的图像,支持jpg、png、tif等多种不同图像格式的图像讯号信息同时输出。
2.4 电机驱动模块设计
单片的电机设计能够直接控制电机输入,pwm用来控制驱动电机的最大转动量和速度。pwm的输出占空比越大,电机进行转动时的速度越快。
2.5 系统原理
此系统的核心部分主要分为6个模块,为mpu9250接口驱动开关电路模块等6个核心模块,并且这6个核心模块总体设计方案构成了本产品系统内部模块整体的电机工作电路原理设计结构图。
3 样机及性能测试
设计师在制作完成所有整个车辆关键部件主要原理加工设计图后,可以对所有整个车辆主要部件原理进行全部加工焊接和部件安装调试。驱动系统控制支架设计中,主控系统需要准备使用一块同时带有一个电源驱动控制支架和srgb888屏幕接口排线部件接口的整个驱动支架stm32f429的最小汽车控制驱动系统板。同时主控需要准备一块万用板,将一辆微型小车所用的需要同时使用的所有汽车主机电源驱动控制支架芯片、mpu9250模块、电机控制芯片定位驱动系统控制支架模块、gps88定位驱动控制支架模块等经过处理,构成自动化乘务。最后各个功能模块的自动数据采集准确无误后,对各个功能模块的自动数据处理进行自动算法分析融合,使自动小车系统能够非常持续稳定地实时获得高质量精度的自动定位路径信息,进行自动定位路径运行规划。
4 技术实施步骤
(1)调研准备阶段。组建项目团队,查阅人工智能相关的国内外最新论文,即查阅已具有的汽车级开源操作系统源代码,所有相关的技术标准和体系标准。调查国外域控制器的最新实现方法和功能安全实现方法,以及所有相关的芯片及硬件架构选择。制定产品项目改进任务书,公司产品技术总体设计改进方案及产品技术改进路线图的选择,制订项目实施计划、风险分析及相应的应对措施、采购相应硬件設施。
(2)项目实施阶段。项目的实施基于开发计划,主要的实施过程有感知融合算法开发、5G技术应用、算法移植、样机准备、样品测试等。完成域控制器的所有设计方案,分析所有国内、外最先进的同行案例,对比分析保证先项目技术先进性。
(3)项目测试阶段。对系统相关设计算法参数做出了调整设计参数,并对其做出了相应的系统性能稳定测试,使其在不同的技术使用条件环境下,达到其所预定的性能稳定性和性能可靠性。解决系统调试中可能出现的各种问题,算法兼容性的测试。系统进行实际应用测试,将系统安装于无人专用车样车,进行包括汽车全场景路测,域控制器多场景应用实测,芯片多场景应用实测等系列测试。
(4)项目应用阶段。对实现的自动驾驶多传感器及5G的融合感知和规划关键技术输出,应用于正在实施和将要实施的商业项目中,并对已完成的商业项目进行升级。
5 结束语
随着时代的不断发展,我国的信息技术也在不断发展,所以在智能无人驾驶车的应用过程中,合理地提高定位系统的设计方案是极其重要的,利用惯性定位以及卫星定位等定位系统,并且做出创新和改革应用于无人驾驶汽车上是有着广阔的发展前景的。而提高这些定位系统的精度并且减小偏差也是非常重要的。这主要通过各个定位系统的相互融合以及优点借鉴在组合之后产生数据分析,找出最佳的数据算法来确定无人驾驶汽车的定位。因此,对于智能无人驾驶汽车的未来发展来说起到了极大的促进作用,也让社会大众的出行变得更为便利轻松。
参考文献
[1] 段建民,石慧,刘丹,等.无人驾驶智能车导航系统控制研究[J].计算机仿真,2016(7):2.
[2] 郭丽芳,游雪辉,苏志鑫,等.无人驾驶智能车导航定位系统设计研究[J].中国管理信息化,2019,22(18):174-176.
[3] 郑阳,陈美玲,李欣鹏,等.基于GPS导航技术的智能无人快递车技术研究[J].通信电源技术,2020,37(1):247-248,250.
猜你喜欢
工业设计(2022年8期)2022-09-09 07:43:20
军民两用技术与产品(2021年10期)2021-03-16 06:05:30
北京测绘(2020年12期)2020-12-29 01:33:58
装备制造技术(2019年12期)2019-12-25 03:06:46
制造技术与机床(2019年10期)2019-10-26 02:47:06
中国洗涤用品工业(2019年4期)2019-05-11 09:27:34
铁道通信信号(2018年5期)2018-06-28 03:06:24
家庭影院技术(2017年9期)2017-09-26 03:41:45
知识经济·中国直销(2017年5期)2017-06-15 20:28:19
通信电源技术(2016年6期)2016-04-20 06:21:32
