高中数理方法在AI机器人社团中的应用
2021-01-22 08:50余有双江苏省苏州外国语学校215104
中学数学月刊 2021年1期
胡 坤 余有双 (江苏省苏州外国语学校 215104)
AI机器人社团活动课是目前高中阶段普遍开展的一门社团课程,该课程因其具备创新性和趣味性等特点,现已成为极具代表性的校本课程之一.[1]该社团活动的开展不仅能提高学生的综合素养,而且对学生的学业成就有较大影响.[2]在AI机器人社团竞赛项目中,应用高中数理方法[3]能发挥较大作用. 笔者以2019年WER(World Educational Robot,世界教育机器人)世界锦标赛为例,从以下三个方面谈一谈高中数理方法在该社团中的应用与实践.
1 基于程序流程图的可视化编程
2019年WER世锦赛中的智能机器人是一辆智能小车. 参赛选手要根据地图和任务模型完成智能小车的路径和动作编程. 由于高中生没有接触到C、C++等编程语言,因此WER官方提供了基于高中数学程序流程图的可视化编程软件. 下图将程序流程图和实际的编程思路作了对比.
图1实现的功能是:输出智能小车巡迹行驶时,遇到左侧路口做出“左转”动作所需的总时间.当灰度传感器采集值为800、小车速度为20 cm/s时开始计时,经运算得出的结果是t=3 s. 计算过程为f=800,v=20,t=0→v=30,t=1→f=1 100→f<2 000→v=40,t=2→f=1 900→f<2 000→v= 50,t=3→f=3 400→f<2 000→t=3.
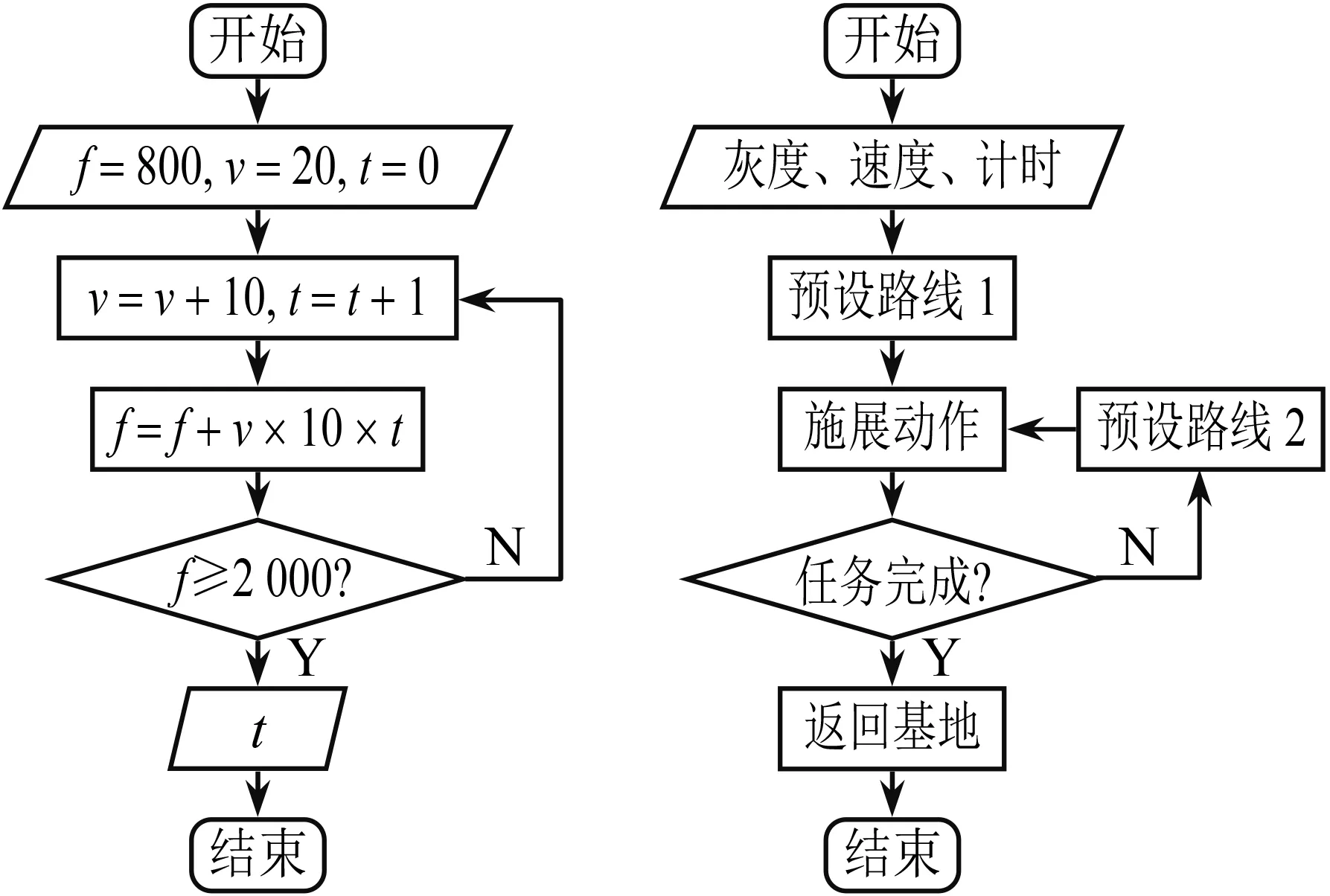
图1 图2
真实比赛中,智能小车每完成一个任务都需要很多个类似于图1的流程图结构,因此参赛学生需以高中数学流程图为基础,先设计流程图1再进行实际编程. 图3是某任务的真实编程结果.

图3
2 通过直线斜率求解智能小车的行驶仰角
2019年WER世锦赛中任务2:小车出基地(图4中点A),巡线行驶至点B上方的任务模型位置,施展动作,完成任务后返回基地. 由于比赛时间是有限的,若小车沿黑线行驶至点B,不仅很耗时间,而且会面临“Y”字路口难题:图4中点C右侧的“Y”字路口并非标准的左转和右转路口,这对小车在路口转弯有干扰. 为了解决该问题,可以让小车在点A与水平线成某个角度匀速直线行驶,直接向点B附近行驶过去. 当小车的灰度传感器检测到B,C两点之间的黑线时停车,然后小幅巡线向任务模型靠近并完成任务.
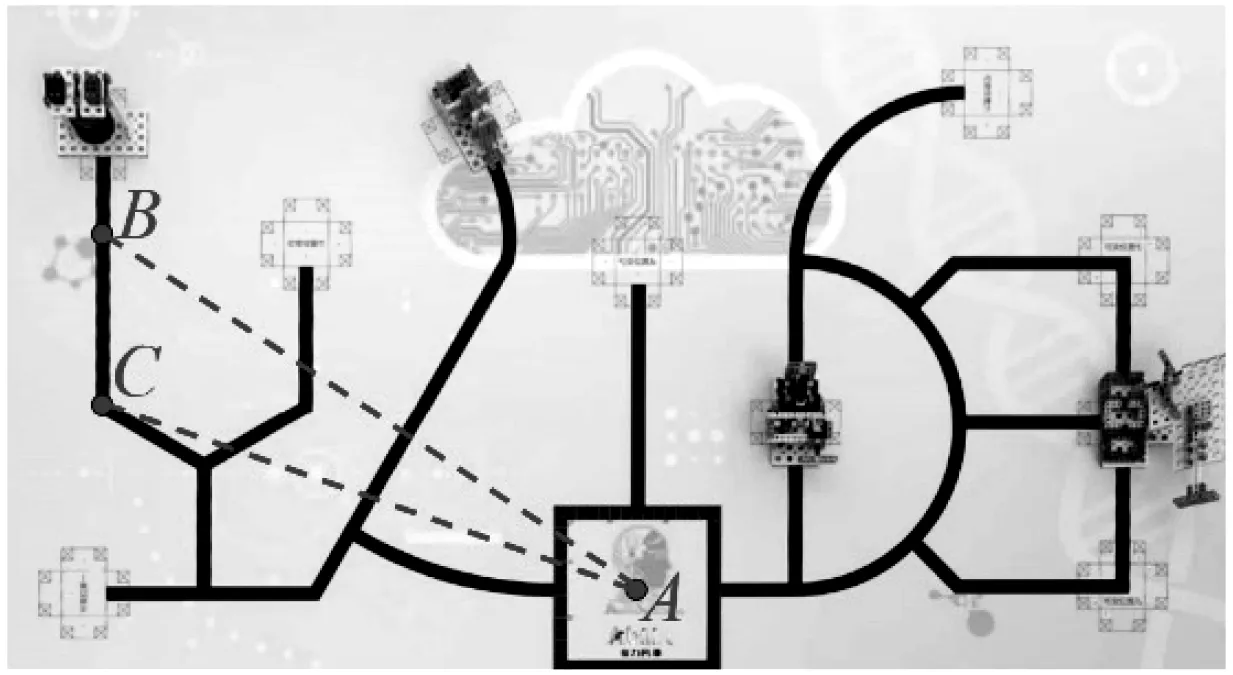
图4

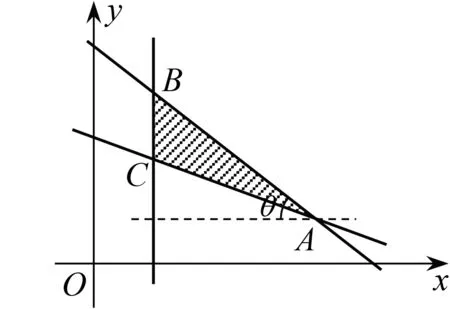
图5
3 运用类平抛与二次函数讨论智能小车的速度
2019年WER世锦赛中任务4:智能小车行驶至如图6所示的模型右侧,通过撞击点M的推杆使得物块N被水平抛出,掉落至点P下方的分拣篮中. 物块N在初始状态下是被放置在倾斜角为60°的背板上,在受到推杆施加的推力后,它的运动过程可看成斜坡上的类平抛运动. 如图7,假设斜坡是光滑的,斜面长为l、宽为b、倾角为θ,物块N沿斜面右上方顶点水平射入,若物块N成功落分拣篮,则须在点P右侧离开斜面,讨论这时物块N的初速度v0(也可近似看成小车的速度). 重力加速度g≈9.8 m/s2,忽略空气阻力.
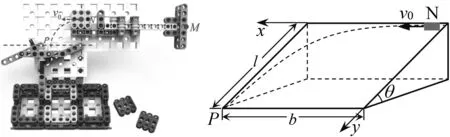
图6 图7
4 结语
综上所述,在AI机器人社团活动中,高中数理方法的应用能帮助学生将所学化为所用,理论与实际相结合,以更科学、更有效的方式解决竞赛中遇到的难题,不仅锻炼了学生的数理思维,更提高了学生的综合素养.
猜你喜欢
中国德育(2022年12期)2022-08-22
高中数理化(2020年24期)2021-01-29
孩子(2019年9期)2019-11-07
高考金刊·理科版(2018年12期)2018-02-02
数理化解题研究(2017年1期)2017-06-15
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
浙江共产党员(2014年12期)2014-07-10
天津医药(2012年3期)2012-11-28
物理通报(2011年12期)2011-01-25