
基于车联网技术的智能防撞系统设计
2021-01-20 04:48付秀伟赵广磊
物联网技术 2021年1期
付 莉,付秀伟,赵广磊
(1.吉林化工学院 信息与控制工程学院,吉林 吉林 132022;2.燕山大学 自动化学院,河北 秦皇岛 066004)
0 引 言
随着科技的进步,代步工具汽车已成为了人们日常生活中不可缺失的一部分[1-2],但车辆持有量迅速上升,也导致交通事故频发发生,每年造成的人员伤亡高达几十万,财产大量损失。给家庭带来沉痛的打击和经济的压力。现交通事故已成为人类的一大危害,因为各部门都非常重视汽车的安全行驶。
传统的汽车安全系统一般是通过机械结构的优化来减轻事故发生的严重性,往往需要驾驶者主动执行相应的操作来减少事故的发生,但由于驾驶者各方面的原因很难保证在整个行驶过程关注力达100%,这样的安全系统已经不能满足人们对汽车安全行驶的需求。随着近几年物联网技术的兴起和MENS传感技术的发展,车联网技术在汽车中得以完美应用,它将多种传感技术应用到汽车中去,可以动态的感知汽车的行驶状态,预测汽车的运行轨迹,对于即将面临危险的汽车采取积极地相应方案,减少人员伤亡,避免财产损失。
基于此,本文提出一种基于车联网技术的汽车智能防撞系统。该系统集多传感检测、GPS定位、电机转向控制和手机APP等功能优势于一体,实现车联网技术下汽车智能防撞功能[3]。
1 汽车防撞系统总体设计
汽车防撞系统是车联网中的关键设计内容之一[4]。它关系着汽车行驶过程中的安全性问题,能对周围的环境进行分析,将对危险车体的物体进行提前预判,规避危险物体,以防事故发生。本系统总体设计主要包括各种传感器模块[5-6]、WiFi和蓝牙模块、GPS模块和ESP32控制器模块、按键模块、语音播报模块和电机检测模块等构成系统硬件结构见图1。
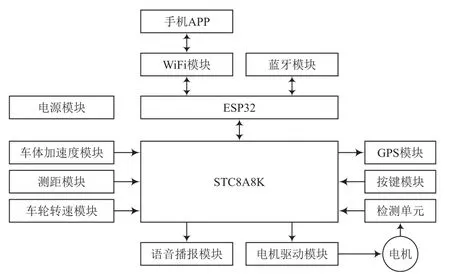
图1 系统硬件结构
1.1 各种传感器模块
汽车在运行中要检测前面的物体或者测试的物体是否对本车体有伤害,就需要对周围的物体进行检测。检测物体的行驶状态和本车体的行驶状态,根据各自的行驶状态预估计未来本车体所处的状态。主要的行车状态包括:车体加速度、车轮转速和车体之间的距离。对周围的物体进行合理的预判得利于完美的传感检测方案,要综合所有传感器,得出一个合理效的运行方案。
1.2 语音模块
语音模块采用LD3320语音识别芯片,该芯片集成语音信号采集和算法识别,能识别50条语音,识别范围在2 m以内,噪音识别率为90%以上,可增加识别的词汇,对一些比较火的词汇可以录入识别,满足时尚人群的选择。LD3320通过串口和微控制器相链接,按照微控制器发送的数据进行相应的语音播报。
1.3 电机驱动模块
电机驱动模块主要是复制刹车和部分转向功能,如果前方有危险,就会主动刹车,如果危险距离过小[7],就在刹车的同时控制转向电机向左方向进行旋转,保护驾驶者避免直接受车体的撞击。在电机转动的同时也要检测电机是否转动超过预期的设定,需要对电机的状态进行监控。因此需要对电机的运行角度进行检测,防止电机转向超过预定角度,保护车体的安全,减少非事故原因的人员伤亡。
1.4 GPS模块
GPS主要采用北斗定位系统,可以通过3D显示车体周围的环境,能让驾驶者很清楚的看到车体周围的状态,特别是对于侧面来向车辆进行实时检测,对于驾驶者在十字路口行驶时,驾驶者要观测前方,左右方的来车,注意力不能集中在一个方向,很容易观测不到其他方向的来车,同GPS北斗定位系统,在十字路口车辆行驶较慢时能准确的或者周围车辆的信息,防止事故的发生。
1.5 按键模块
按键模块主要对与一些非自动控制情况的特殊情况进行设定。因车体、驾驶者的驾驶习惯等不同,需要对系统的行驶的安全距离进行设定,降低因为车轴距大小和驾驶者反应强度造成的性能差异所引起的事故。
1.6 WiFi模块和蓝牙模块
采用的ESP32内部集成了WiFi模块和蓝牙模块,可以很方便的进行系统设计。系统通过ESP32实现网络的连接,也可以通过APP进行查看,设计起来非常方便。
2 软件设计与实现
2.1 距离检测
距离检测主要通过车体周围的超声波进行检测。系统根据发出去和返回来的超声波的时间差计算出车体与障碍物之间的距离,如果超过设定值就发出报警,并采取相应的制动控制。测距流程如图2所示。
2.2 电机制动
汽车在正常行驶中很容易受到前面和侧面物体的影响,极易发生事故。因此本文通过车体的超声测距来测量周围物体的距离,然后根据车速的情况进行相应的刹车或者转向运动,避免事故的发生,或减轻事故对驾驶者的伤害,将损失降到最低。电机执行流程如图3所示。
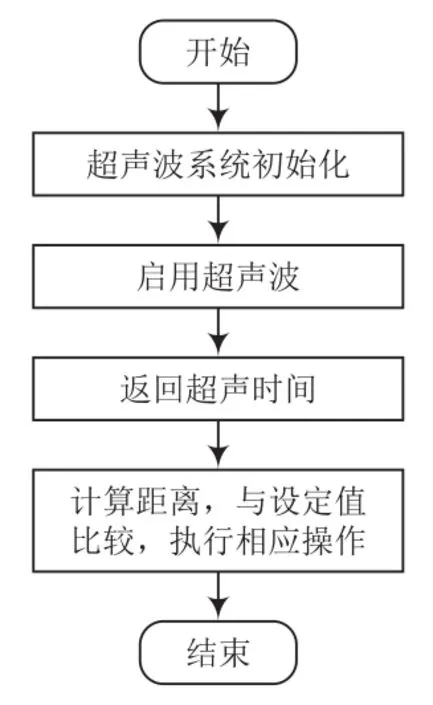
图2 超声测距流程
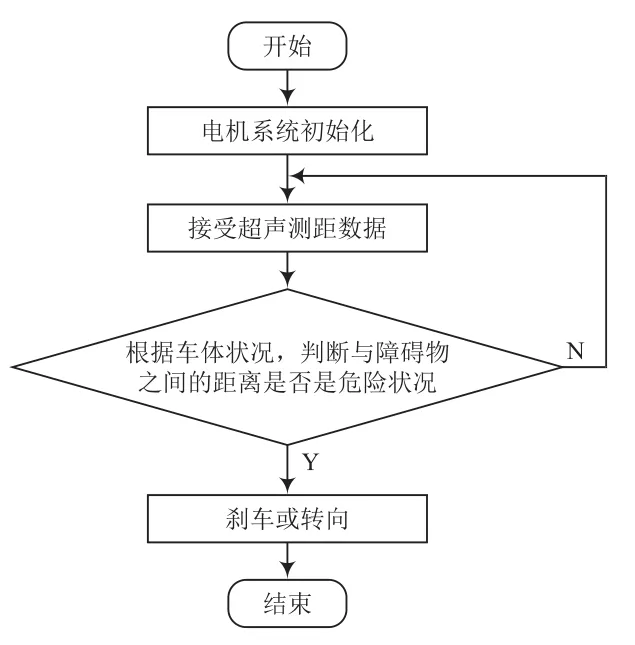
图3 电机执行流程
3 结 语
车联网的发展必定是汽车未来的趋势。在车联网环境下,人们对汽车安全的重视越来越高,未来汽车需要配多传感技术。结合最新5G的发展,大家对车联网的智能防撞系统会越来越重视。本文设计的汽车碰撞系统功能完善,具有应用性强、成本低、可靠性高等特点。
猜你喜欢
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
科学家(2017年20期)2017-11-10
中国公路(2017年13期)2017-02-06
电力系统及其自动化学报(2016年5期)2016-12-01
海外星云(2016年15期)2016-08-04
民用飞机设计与研究(2015年3期)2015-12-07
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
汽车之友(2015年9期)2015-05-06
