
基于快速离散曲线变换的各向异性虹膜识别 ①
2021-01-15 03:27佟镓名史庆武于家祥
佳木斯大学学报(自然科学版) 2021年1期
佟镓名, 李 航, 史庆武, 于家祥
(1.沈阳师范大学软件学院,辽宁 沈阳 110034;2.佳木斯大学信息电子技术学院,黑龙江 佳木斯 154007)
0 引 言
现在的社会信息交换的很快,建立一个人的身份是一项至关重要的任务。随着对安全性和快速发展的高度关注,对可靠的人员认证技术的需求也在增加。生物识别技术被描述为一种基于生理或行为特征来识别个人的科学,超越了基于令牌或知识的传统技术[1-4]。
这是因为生物识别技术可以有效地验证冒名顶替者的身份。基于虹膜的识别由于其独特,稳定且非侵入性的特性,在各种生物识别技术(面部,指纹,手掌静脉,虹膜等)中,对于高安全性环境而言是最有前途的。它是通过分析虹膜的随机图案并将其与数据库(DB)中的参考图案进行比较来识别个人的过程。虹膜是眼睛图像的瞳孔(黑色部分)和巩膜(白色部分)之间的环形部分。虹膜识别系统的总体框图如图1所示。该系统分为注册和身份验证模块。配准过程包括虹膜图像的采集、分割、归一化、增强和特征提取。这些函数作为引用存储在数据库(DB)中。在识别(决策)过程中,测试虹膜特征与存储的特征进行比较。
识别准确度取决于人工情况的存在和虹膜表示的有效性。已经观察到虹膜由许多不规则的特征(质地)组成,这些特征本质上是随机的。使用传统变换(例如DWT,双树复杂小波变换(DT-CWT),Gabor,DCT等)来定位此类特征非常困难。本文提出了一种新颖的特征提取技术使用2D快速离散Curvelet(FDCT)的高度各向异性虹膜功能。通过分析k-out- n后分类器,选用决策级别的融合策略,为了降低错误拒绝(最大限度地减少内部类变化)。所提出的技术在存在伪像的情况下实现了低错误率,且具有旋转不变性[5-8]。
1 Curvelet变换
多分辨率方法证明了其在模式识别中进行纹理分析的能力。 DWT和相关的经典多分辨率方法无法表示随机定向的边缘(直线和曲线)。由于Gabor滤波器的多方向方法,因此在模式识别方面比DWT更好。但是,由于Gabor滤波器中光谱信息的丢失,它们无法有效地表示图像。而且,几乎所有的传统方向小波变换(包括Gabor)都在所有尺度上提供固定方向。为了获得光谱信息的完整覆盖,以捕获与比例有关的多个方向(图案的任意局部方向)和高度各向异性的特征,提出了Curvelet变换。 Curvelet变换用于有效表示图像中的边缘和线条不连续性[9,10]。
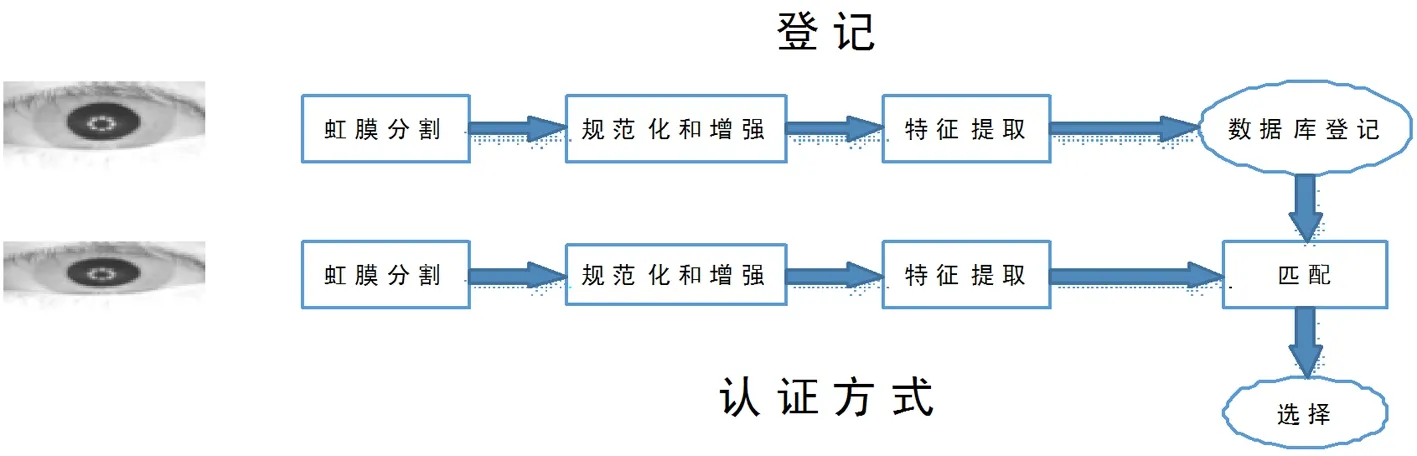
图1 虹膜识别框图
(1)
因此,二维离散曲波系数定义为:
(2)

2 本文提出的虹膜识别方法
基于2D-FDCT计算出来新的方向虹膜纹理特征,它将归一化的虹膜图像分为六个子图像。 Curvelet变换分别应用于每个块(子图像)。使用这些Curvelet系数的方向能量得出每个子图像的FV。在验证期间,在两个虹膜图像之间获得了六个欧几里得距离。使用后分类器将这六个距离得分融合,以减少错误率。
2.1 使用2D-FDCT提取虹膜特征
眼睛图像需经过预处理并从中提取虹膜特征。预处理涉及虹膜图像的定位,标准化和增强。在本文中,虹膜使用Daugman的积分微分算子进行了局部化,并通过Daugman的胶板模型进行了归一化。归一化的虹膜图像使用背景减除法得到增强。预处理步骤如图2所示。
本文建议通过包装使用2D- FDCT来提取重要的各向异性虹膜特征以进行识别。已经观察到,虹膜伪影的最常见类型(虹膜阻塞和反射)分别局限在垂直和水平虹膜极限处。从自然和人工照明环境出现的反射大部分位于虹膜的外部和内部。为了使伪影在虹膜识别中的影响最小化,将归一化的虹膜图像划分为六个子区域,在这六个区域的每一个上使用Curvelet变换来提取虹膜特征。从(2)(使用离散形式)获得不同尺度和方向的曲线波系数c(j,l,k)。
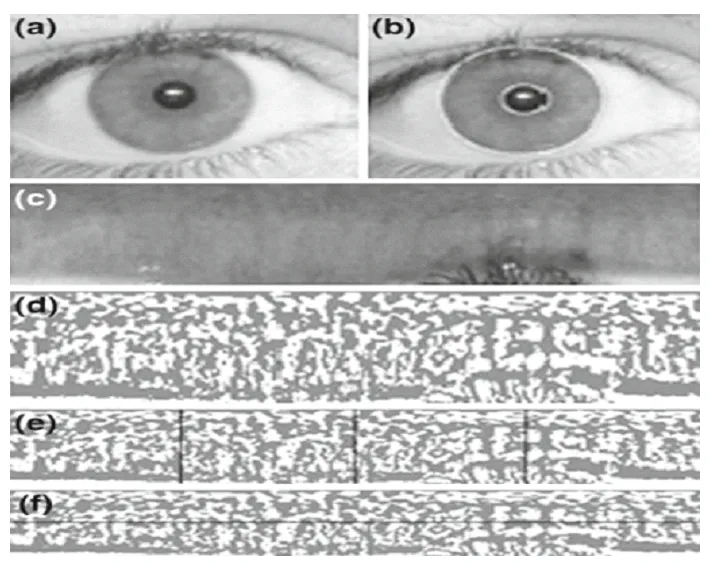
图2 a原始眼图像;b分割虹膜图像;
由于能量是识别图案的重要特征(通常在文献中用于表示纹理),根据L1范数从每个曲线波子带计算归一化方向能量,以形成FV。
(3)
其中Em是曲率系数cm(p,q)的第m个子带的能量,维数为M×N。各向异性特征是针对每个尺度和方向得出的。
其中S是Curvelet子带的总数。这些FV作为参考存储在数据库中(注册过程)。根据测试虹膜FV与数据库(训练图像)之间的最小欧氏距离(ED)对测试虹膜图案进行分类。ED计算为:
(4)
其中S是FV的维数。Xi是测试FV的第i个组成部分,Yi是已注册FV的第i个组成部分。
以下步骤详细描述了特征提取算法:
1.使用积分微分算子对虹膜图像进行分割。
2.使用Daugman的橡皮片模型对分割后的虹膜进行标准化。
3.背景扣除法用于增强归一化虹膜图像。
4.此增强的归一化图像分为六个子区域。
5.通过包装的2D-FDCT在这六个子区域中的每一个上分别使用,以提取虹膜特征。
6.通过估计每个子区域的Curvelet子带的方向能量,得出六个FV。
2.2 基于后分类器k-out-of-n的虹膜识别
虹膜识别算法已成功实现了较低的错误接受率(FAR)。但是,降低错误拒绝率(FRR)仍然是主要挑战。 FRR需要减少以使虹膜识别算法更健壮。提议的后分类器直接在接收器操作特性(ROC)上工作。 ROC是测试和已注册FV之间距离得分的间接表示。 ROC是通过更改距离得分的阈值获得的。等错误率(EER)是通常的最佳工作点(FAR = FRR),它指示距离得分的阈值。从n虹膜区域获得的多个ROC由后分类器融合,以提高性能。在这项工作中,虹膜识别的性能是通过测量拒绝真实用户(FRR),接受冒名顶替者用户给定阈值(FAR),计算识别准确度和计算复杂度所产生的错误来评估的。下面介绍一下k-out-of-n后分类器。
在此规则中,融合后的FRR表示为:
(5)
融合后的FAR表示为:
(6)
因为n的大小可以灵活调节,因此定义为k-out-n后分类器。
3 实验结果
本节介绍了使用UBIRIS,MMU1和CASIA-Iris V2数据库对提出方法进行实验评估。所提出方法的性能已与其他三个虹膜识别算法进行了比较,包括特征加权融合FWF[11],HLG[12],WBP[13]。
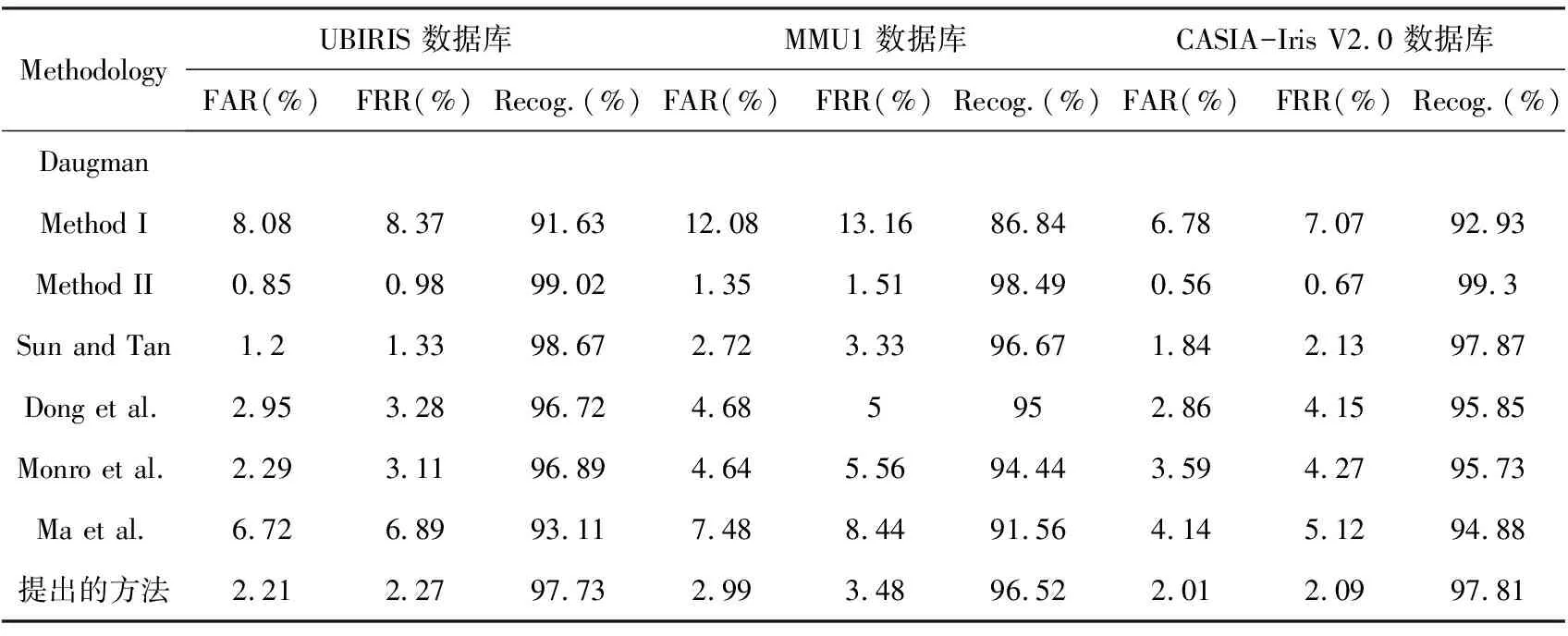
表1 UBIRIS,MMU1和CASIA-Iris V2.0数据库上不同虹膜算法的识别准确性和错误率
使用整数微分运算符将UBIRIS,MMU1和CASIA Iris V2.0数据库的图像中的虹膜区域分开。每个分割的环形虹膜区域均被标准化为固定大小为64×360的矩形区域。在本文中,为了测试在存在伪影的情况下所提出方法的鲁棒性,没有使用任何预处理技术来隔离伪影和虹膜识别过程中的睫毛,反射,缩放和平移效果分别在归一化和分割中删除。通过将虹膜环转换为尺寸为64×360的矩形固定块(具有五个初始角度-10°,-5°,0°,5°,10°)来实现旋转不变性。注册过程对每个对象使用了两个虹膜图像。因此,每个人的注册图像总数为10。对于测试,每类使用剩余的三个虹膜图像。在任何情况下,培训和测试数据库中的图像都不能重叠。归一化的虹膜图像分为六个区域,以最大程度地减少类内差异的影响,并产生更多方向性的虹膜信息以进行识别。 FDCT应用于每个区域以计算FV。因此,得出每个虹膜图像的总共六个FV。虹膜识别过程中出现的伪影(眼睑和睫毛的遮挡,不准确的定位,反射,照明变化,运动模糊等)会导致准确性降低。为了在存在伪影k-out-n的情况下提高性能(降低FRR):在这六个FV上提出了后分类器。
在训练过程中,从类间和类内比较(对应于六个子区域)中获得了六个独立的ROC集。使用(7)和(9)将这些ROC组合在一起,以得到单个ROC。根据此ROC,最佳工作点由FAR和FRR的可能组合决定。使用此最佳工作点可获得相应区域的阈值。
在下一个实验中,将测试后分类器的性能。在此实验中,使用特征级融合(六个FV的串联)来创建s单个FV进行比较。因此,每个人总共注册了10个FV。在验证模式下,重复相同的过程以计算测试光圈FV。根据最小距离(最接近的邻居分类器),将此测试FV与使用ED的人的10个已注册FV进行比较,以验证该人。通过该过程,获得了类内和类内ED,以估计所有三个数据库的FAR和FRR。表1列出了所提出方法的错误率。可以看出,k-out-of-n后分类器提高了所提出方法的识别性能。在表2中。可以看出,进行身份验证所需的时间。
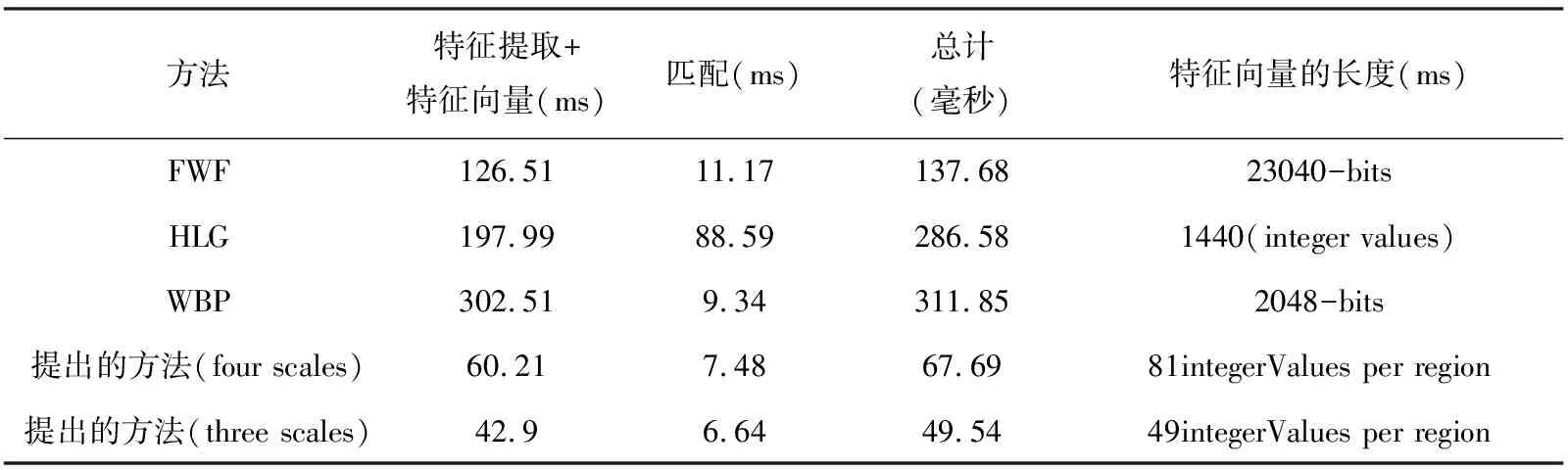
表2 不同算法的平均计算时间
4 结 论
本文提出了一种新颖的虹膜识别系统,该系统基于快速离散曲率变换和可变形的k-out-of-n融合后分类器。 FDCT提取各向异性特征,并在每个尺度上提供更多方向信息。所提出的方法是旋转不变的。提取出的虹膜也不会被异常化并划分为六个子图像。使用FDCT从这六个子区域中得出各向异性FV。从这些区域获得的ED用于做出最终决定。通过使用k-out-of-n融合这六个距离来获得最终决定:通过减少FRR来提高性能的规则。实验结果表明,在非理想的环境条件下(存在严重的眼睑,睫毛,不准确的定位,照明变化,反射,模糊等),该方案的性能得到了提高。
猜你喜欢
中国典型病例大全(2022年11期)2022-05-13
中国医学物理学杂志(2021年1期)2021-02-05
汽车实用技术(2019年6期)2019-04-11
中国医疗器械信息(2019年3期)2019-03-09
中国医学影像学杂志(2018年9期)2018-10-17
文萃报·周二版(2018年51期)2018-08-04
计算机应用(2017年4期)2017-06-27
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
中国卫生标准管理(2015年4期)2016-01-14
