基于IRobotSIM的物料分拣仿真系统设计
2021-01-13 12:17李国琴邓三鹏祁宇明赵丹丹
装备制造技术 2020年10期
张 睿,李国琴,邓三鹏*,祁宇明,赵丹丹
(天津职业技术师范大学机器人及智能装备研究院,天津300222)
0 引言
近几年来,虚拟仿真技术在实际教学的应用越来越广泛。陈勇强[1]使用VUP软件搭建了一个物料分拣虚拟仿真平台,开发了相应的虚拟仿真系统,描述了模型的仿真动作和实现过程,为远程线上教学提供了参考。刘甘霖[2]等人通过RobotStudio做出了气动手爪模型的虚拟仿真,设计了Smart组件,综合机械模型和Smart组件给出了完整的授课内容,为学生提供了工业机器人虚拟仿真的具体应用实例。熊隽[3]等人基于RobotStudio设计了一种基于工业机器人的综合虚拟仿真实验平台,实现了综合虚拟平台机器人的涂胶、搬运、码垛等功能,提高了操作安全性的同时,加强了学生的实践能力,对工业机器人相关课程的教学起到了很好的辅助作用。本文基于IRobotSIM建立了仿真平台,拥有较丰富的模型库,包括国内外知名品牌工业机器人、机床、夹具等,模型库中的模型可拖拽应用于系统搭建,可根据任务需求进行选择,研发的物料分拣仿真系统对职业院校的并联机器人离线仿真教学提供了条件,节约了成本,提高了安全性。
1 物料分拣仿真系统的组成
过来的物料,并有序放置在收纳盒中;物料传送带的主要功能是对物料进行输送,配合并联机器人进行抓取,保证物料的顺利传输;收纳盒传送带的主要任务是把收纳盒输送至并联机器人开始放置物料的位置;机器人支架的作用是固定并联机器人,使并联机器人处于工作的最佳位置。
2 物料分拣仿真系统模型的建立
2.1 并联机器人建模
应用Solidworks对三自由度delta型并联机器人进行三维模型建模,建模完成后导成.stp格式导入到仿真软件中。分析并联机器人的结构,找出动平台、定平台和工作空间,每条分支链的组成部分,包括各连杆、中间链、各分支链以及关节类型,并重新设置各部分实体,在每个相应的关节处添加对应的旋转关节或平行关节,在建立关节时,将每个关节的求解模式设置为反向运动模式。拖动关节和实体,按照主链从定平台到动平台的顺序,其它分支链从动平台到定平台的顺序,中间链从定平台到动平台,依次构建如图1所示的关节树。将已构建好的机器人支架,与已建模的并联机器人进行装配,确定其安装位置与运动方式。建模完成的并联机器人如图2所示。
物料分拣仿真系统主要有四个部分组成,包括并联机器人、物料传送带、收纳盒传送带、机器人支架。并联机器人的主要功能是抓取物料传送带输送
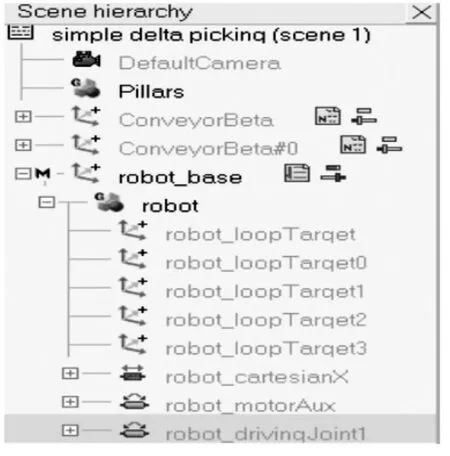
图1 关节树
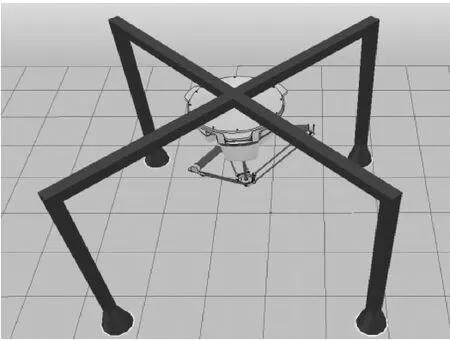
图2 并联机器人建模
2.2 传送带建模
应用Solidworks对物料分拣仿真系统的物料传送带和收纳盒传送带进行三维模型建模。将完成后的零件图转换为.stp格式,并导入至仿真软件中。添加其各部分物理属性,并设置其颜色、位置坐标;设置物料和收纳盒被并联机器人抓取的位置坐标;配置相关距离传感器。搭建完成的仿真系统如图3所示。
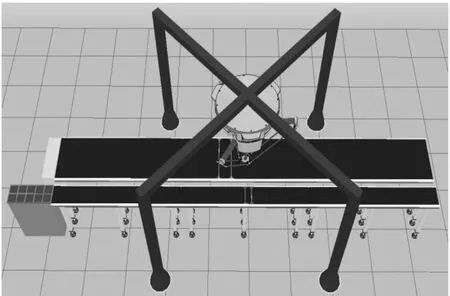
图3 物料分拣仿真系统
3 仿真系统动作的实现
仿真系统需要运动动作的有物料传送带、并联机器人以及收纳盒传送带。虚拟仿真系统的动作过程如下:收纳盒传送带和物料传送带同时运动,当收纳盒到达并联机器人放置物料的位置时停止运动,同时物料传送带将物料输送至并联机器人的抓取位置,并联机器人开始依次抓取物料并放置在收纳盒中。
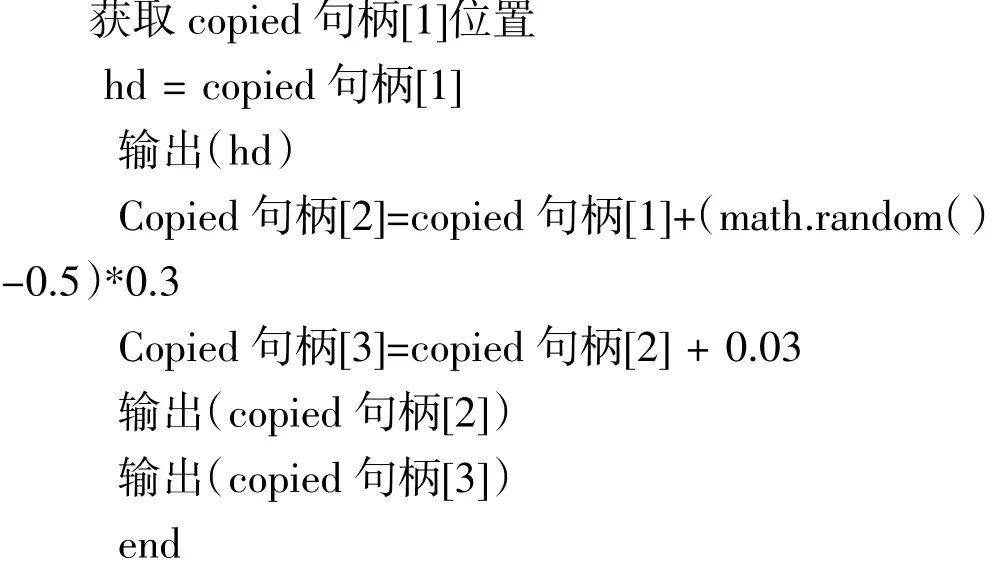
仿真系统动作的实现需要添加三个线性脚本,线性脚本1的功能是将物料传送至并联机器人的抓取位置,同时触发机器人的机械臂抓取物料,线性脚本1如下所示:
线性脚本2的功能是将收纳盒传送至并联机器人开始放置物料的固定位置,当第一个收纳盒装满物料后,第二个收纳盒再次移动到上次的固定位置,重复以上的动作,线性脚本2如下所示:
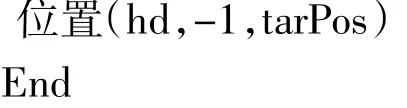
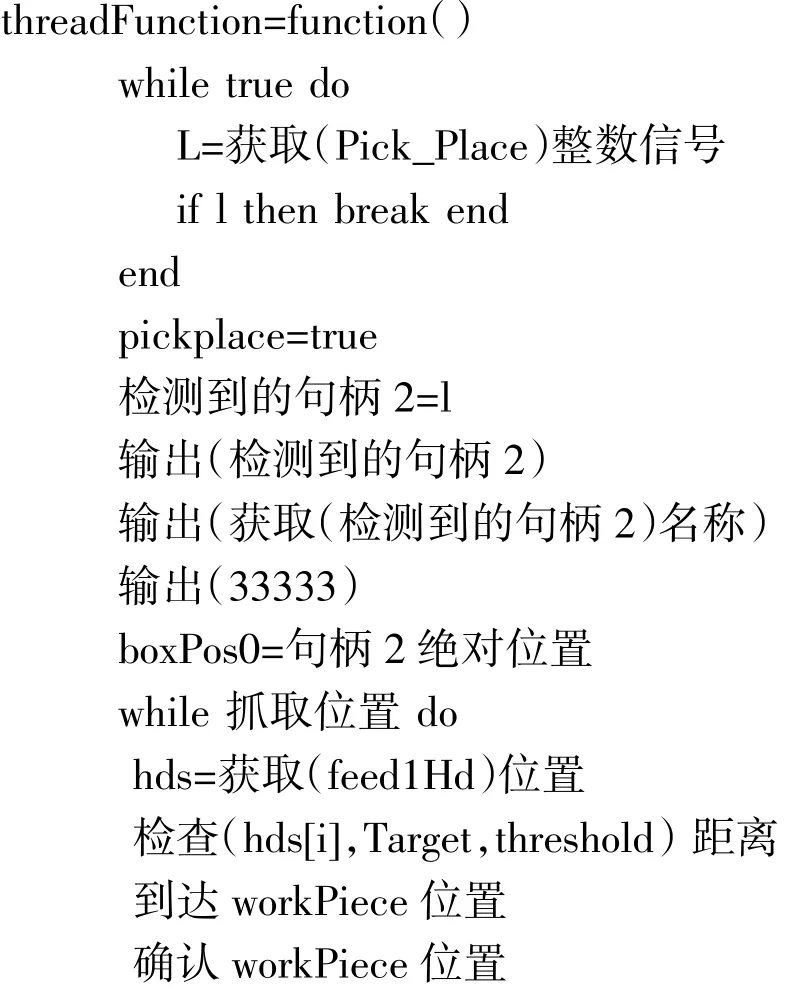
线性脚本3实现的主要功能是当物料移动到并联机器人开始抓取的位置时,并联机器人开始依次抓取物料至收纳盒中,线性脚本3如下所示:
夫葬者,藏也。藏也者,欲人之不得见也。而大为棺椁,备赠存物, 无异于埋金路隅而书表于上也。虽甚愚之人,必将笑之。丰财厚葬以启 奸心,或剖破棺椁,或牵曳形骸,或剥臂捋金环,或扪肠求珠玉。焚如 之形,不痛于是?自古及今,未有不死之人,又无不发之墓也。[16](P746)

ITC官方的统计数据显示,2017年,世界甘薯(HS编码:071420)的出口贸易总量和总额分别为63.0万t和5.256亿美元.世界甘薯贸易的主要输出国包括美国、荷兰、中国、西班牙等国家,其中美国的出口贸易额占世界比重为35.01%,排名前5位的国家出口贸易量和贸易额占到世界出口总量的比重分别为66.42%和71.61%(表1),行业集中度较高.进口市场方面相对分散,世界甘薯主要进口市场包括英国、荷兰、加拿大、德国等国家,排名前5位国家甘薯进口额约为62%.
潘天寿是1966年9月6日被揪出来的。拉上街在雨中游斗,当夜即发烧病倒了。据小儿子潘公凯统计,此后总计批斗达百次,其中牛棚里有记录可查的批斗即有70多次。

通过上述模型建立的方法以及动作设置可以有效实现物料分拣仿真系统的设计和动作。
4 结论
本文分别对物料分拣仿真系统的组成、仿真系统模型的建立以及仿真系统动作的实现等三个方面进行了论述,利用以上模块搭建出符合实际授课需求的物料分拣仿真系统。该仿真系统在实际教学中满足了学生对并联机器人离线仿真的学习,作为学生在实际操作前的模拟仿真模型示例,有效提高了学生在实际操作时的学习效率和安全性。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
中学生数理化·高一版(2021年1期)2021-03-19
童话世界(2020年14期)2020-12-18
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
少年漫画(艺术创想)(2019年5期)2019-09-18
电子制作(2019年23期)2019-02-23
故事作文·低年级(2018年8期)2018-08-14
消费导刊(2018年8期)2018-05-25
中学教学参考·理科版(2016年11期)2017-06-08
燕山大学学报(2015年4期)2015-12-25