电力系统微机保护中低频减载误动问题的探究
2021-01-12 05:47严红洲
科技尚品 2021年12期
严红洲
摘 要:电力系统中的微机保护是当前的主流模式。对于中性点不接地系统,微机保护的低频减载功能非常重要,它是在电力系统中发电机出力不足的情况下,保证用户的重要负荷正常工作的主要手段。实际运行时,在不接地系统中由于电力系统偶尔会出现单相接地的情况,此时会导致低频减载误动,从而非预期将不重要负荷误切除,扩大了事故的停电范围以及非预期停电的影响,降低了供电的可靠性。文章根据实际运行经验,提出了当系统发生单相接地时采用频率滑差闭锁低频减载功能的方案,并着重讨论了频率滑差的算法及实现过程。
关键词:低频减载;滑差;微机保护
中图分类号:TM774 文献标识码:A 文章编号:1674-1064(2021)12-0-03
DOI:10.12310/j.issn.1674-1064.2021.12.015
电力系统继电保护装置发展到微机继电保护装置,已有二十五年左右的时间。在这一过程中,微机继电保护取得了突飞猛进的发展,从最初的单一功能扩展到现在的综合功能,从最初的固定式结构发展到现在的背插式结构,从最初的单一的RS485串口通信发展到现在的多个以太网、PROFISBUS—DP口、CAN口、光纤、无线等,从最初的支持各个企业的私有协议发展到现在的支持PROFIS—DP协议、MODBUS、IEC61850、IEC103、IEC104、IEC101等协议,从最初的不带故障录播发展到现在的可以在线显示故障录播以及支持标准的COMTRADE录播格式,从最初的保护功能的简单逻辑发展到现在带多种闭锁逻辑的复杂保护功能[1]。低频减载就是其中一个典型例子。
早期的低频减载功能是:当电力系统用户的负荷比较大,为保证重要负荷,采用判断频率低于整定定值的情况下,将不重要的负荷切除,即跳开不重要负荷对应的断路器。低频减载功能最基本的逻辑是当系统的频率低于设定的定值且达到设定的时间后跳开不重要负荷回路对应的断路器,而这个功能可以正确可靠地动作,仅仅依靠这个基本逻辑是不够。
1 低频减载的误动问题
微机保护的频率测量有硬件和软件两种模式,文章采用了软件计算的模式。
软件频率测量的对象是系统的A相电压的频率,计算的方式就是统计电压的波形超过某一个值之间的计数值及间隔时间,并采用这个计数值除以间隔时间,从而得到实际电力系统的频率。电力系统中110 kV系统和0.4 kV系统的中性点是直接接地系统,而35 kV、10 kV系统是中性点不接地系统。中性点直接接地系统在发生系统单相接地时,要直接跳闸,而中性点不接地系统在系统发生单相接地时可以持续运行一段时间[2]。
现场实际运行中,当用户投入低频减载功能后,不接地系统的B相或者C相接地,此时微机保护测到的频率不会变化,还是正常频率50 Hz左右,因此,低频减载不会不动作,即不会跳开用户不重要负荷对应回路的断路器。当系统A相接地时,系统的频率虽然没有变化,也可以正常运行1小时~2小时,但微机保护检测到系统的频率低于设定的定值,且保持时间达到了设定时间,低频减载保护动作,跳开了断路器。这是一个误动作,因实际系统的频率并没有发生变化,还是50 Hz左右,不能因为系统A相接地而将次要负荷切除;况且此时系统仅仅是A相电压变为0,B相电压和C相电压变高,但系统的三个线电压Uab、Ubc、Uca的幅值和角度是没有变化,电力系统在这种情况是可以正常运行的,仅仅需要微机保护对外发出一个接地的告警信息,告知系统维护人员有接地故障,让系统维护人员尽快处理。一个误动作对于微机保护是致命的,微机保护的一个重要的特性就是准确动作,即该动作时要动作,不该动作绝对不能动作。当一个保护误动作时,作为微机保护的生产企业需要尽快处理找到实质性的原因,并解决掉,否则会给用户造成更大的损失,同时给生产微机保护的企业带来信誉的损坏和用户对该企业的信任危机。
2 误动问题的分析
当系统A相接地时,虽然此时电力系统的频率没有变化,但是此时系统的A相电压的波形发生了畸变,A相电压的幅值很快有正常值降低到一个接近0的值,在这个降低的过程中导致微机保护测到的频率降低,使低频减载功能误动作,跳开不重要负荷回路对应的断路器,将不重要负荷从系统中切除了。由于A相电压的波形发生了变化,不再是50 Hz的正弦波,根据频率测量的算法,在此种情况下是无法保证能测量到正确的系统频率,这是采用频率算法的先天性缺点,只能选择其他方式补救。
為此,要增加频率滑差功能,闭锁低频减载功能。频率滑差就是频率在单位时间内的变化率df/dt,单位为Hz/s,就是判断1秒钟内频率变化的大小。如果滑差的定值为5 Hz/s时,则当滑差大于5 Hz/s时,闭锁低频减载保护;频率正常时开放低频减载保护。
3 误动问题的解决
低频减载功能的频率滑差保护逻辑是比较容易实现的,就是判断滑差的值是否大于整定的定值。如果大于整定的定值,就将闭锁低频减载功能的标志位置1;当低频减载这个功能运行时,会自动判断这个标志,如果这个标志位1,则闭锁低频减载保护。此处需要注意,不能当滑差值小于滑差定值将这个标志置为0,因为当系统A相接地时,微机保护测到的系统频率变化的时间很短,这个时间肯定小于低频减载保护的时间定值。如果将这个标志清零,则滑差无法闭锁低频减载功能,应该采用的方式当频率正常时将这个标志清为0。
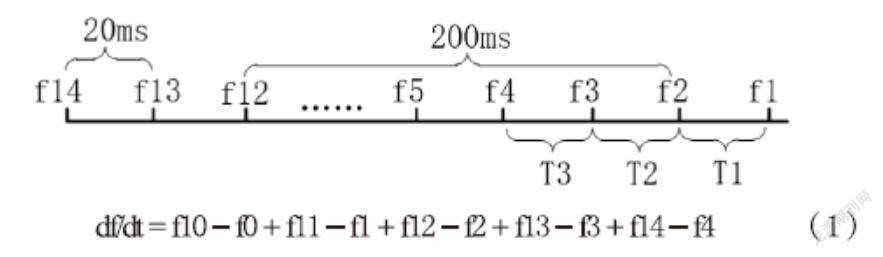
根据滑差的定义1秒内频率的变化率,给出了滑差的算法是采用5个连续的间隔200 ms的5组频率值的差的和作为实际滑差值。此算法的原理是利用5个200 ms的间隔时间组成一个1 s的值,并将这5个200 ms的间隔时间内频率变化值相加,正好是1 s频率变化的值。具体公式如下:
df/dt=f10-f0+f11-f1+f12-f2+f13-f3+f14-f4 (1)
注:f0~f14为微机保护测试到具体频率值;f14到f13的间隔时间为20 ms,f2到f12的间隔时间为200 ms。
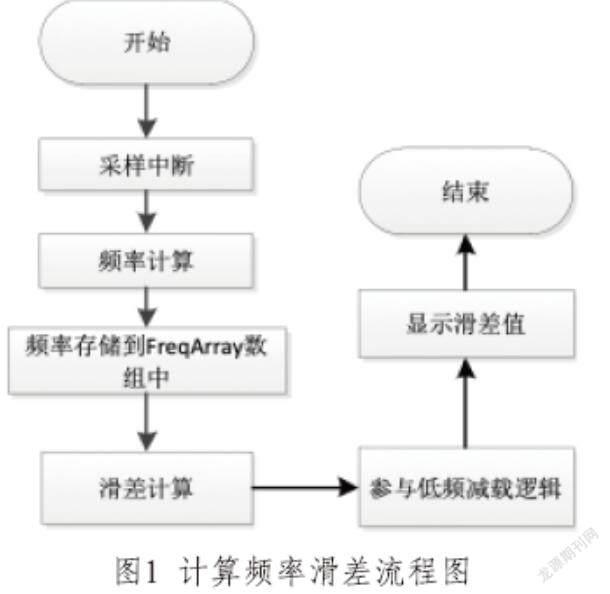
滑差实现的过程:在程序开始运行,定时器中断后,进入模拟量采样中断,当检测到有上升沿来时开始计算频率f,并将频率f存储下来,然后,按照公式(1)计算频率滑差,流程图如图1所示。
该算法的验证需要继电保护测试,当然如果有数字仿真系统是最好的,但我们采用了继电保护测试同样可以模拟现场系统频率单相接地的情况。继电保护测试仪是专门应用与微机保护的测试装置,它可以输出电压、电流,并可以输出不同频率的电压电流,同时可以测试保护逻辑的动作时间和动作值。测试动作值时要采用逐步逼近保护动作值的方式,且步长要尽量短。测试保护动作时间时,一个变化步长的时间一定要大于保护的动作时间,否则会导致测试的动作不对或者超差。这个测试仪还有一个专门用于测试低频减载功能的模块,该模块可以测试滑差的闭锁值和滑差的精度。
本研究将继电保护专业测试仪输出的三相电压加到微机保护的A\B\C\N的端子。经过继电保护测试仪的频率测试模块中的滑差闭锁模块的测试,采用此算法计算的滑差的精度可以达到±0.5 Hz/s。由于没有电力系统仿真系统,导致模拟现场A相直接接地比较麻烦。经过采用多种方法实验比较,最终采用了在测试仪保持电压输出的情况下快速断开A相电压,模拟系统频率的消失。这种快速断开A相电压的过程与不接地系统A相直接接地的过程非常相似,当快速断开A相电压时,微机保护测到的A相电压的波形也发生了变化。在此过程中,微机保护测到的频率也会降低,且滑差值很大。经过多次测试,发现微机保护的低频减载功能可以被闭锁。同时,当系统的频率缓慢降低时,低频减载也可以正确动作。这就说明增加滑差闭锁的方案可以解决不接地系统单相直接接地时低频减载误动问题[3]。
但是在后来的现场实际使用中再次出现了低频减载功能误动情况,根据现场返回的故障录波,可以判断系统的A相并非一次性直接接地,而是发生了间歇性电弧接地,与此前的现象不一致。
间歇性电弧接地:在中性点不接系统中,当三相电压中发生一相接地短路故障时,经常有电弧出现,由于电力系统中存在电感、电容,此时有可能会导致线路某一部分的发生振荡,当振荡点在工频零点时,电弧会暂时熄灭,由于接地相电压会再次升高,电弧则会重燃,其危害是非常容易引起系统谐振产生过电压和接地过电压,导致设备绝缘损坏。
经过对现场返回故障录波和低频减载功能逻辑仔细分析研究,发现是由于滑差闭锁在系统间歇性接地的情况下没有将低频减载功能闭锁,从而开放低频减载功能,导致低频减载功能误动。而导致没有闭锁的原因就是滑差计算值不准确、不及时造成的[4]。
上面的算法存在以下问题:第一,最终滑差的精度不够,需要达到0.1 Hz/s。第二,滑差计算值得范围太小实际只有±20 Hz/s,最大需要达到200 Hz/s。第三,错误地认为两次频率值得间隔为20 ms。这个20 ms是当系统未发生故障时两次频率值之间的间隔时间,当系统發生A相接地时,两个频率值之间的间隔时间是实时变化的,不会是一个固定值;同样的道理f10~f0的间隔时间肯定也不是200 ms,这个算法从原理上说有一定的问题。第四,滑差本身是反映频率的变化率的,但系统间歇性接地情况下,频率是在很短的时间内快速变化的,而公式(1)上面滑差最大只能反映200 ms以上的变化,在200 ms以内的变化根本无法快速反映。系统间歇性接地时,接地相的电压波形快速地在零点上下波动,且在零点上和零点下的时间很不稳定。这就导致微机保护测量系统的频率变化出现异常,频率滑差值在上述计算方法下无法快速跟随和反应频率的变化,导致低频减载功能误动的直接原因。
为解决低频减载功能在系统间歇性接地的情况下,低频减载误动的现象,将滑差的算法做了改进,将频率变化的频率值缩短到连续的4个,并根据最近的3个频率值计算实际的频率采用的间隔,这个间隔是变化的,公式(1)的算法是固定的200 ms。如果频率是正常的50 Hz,则实际的频率采样的间隔是20 ms,4个频率值采样的总时间为60 ms;而现在由于频率值是变化,则新的算法充分考虑到这一点了。新算法的原理就是采用在3个周波内部的频率变化值除以3个周波的时间,将滑差值的范围扩大到250 Hz/s。通过这种方式,可以提升滑差的反应的速度,提升滑差的精度和测量范围。
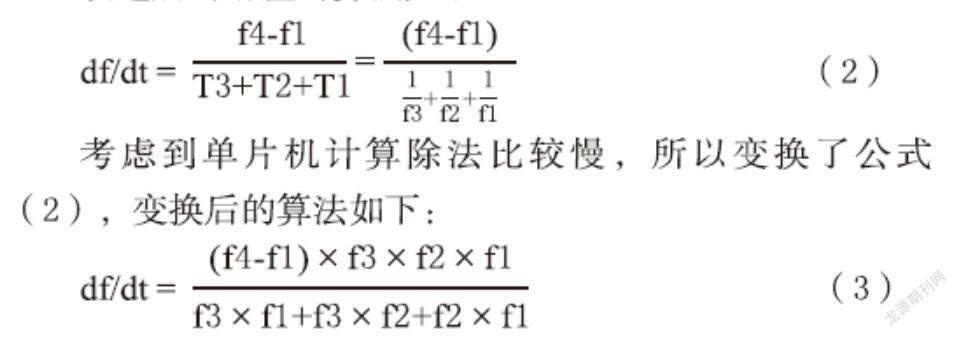
改进后的滑差的算法如下:
df/dt= (2)
考虑到单片机计算除法比较慢,所以变换了公式(2),变换后的算法如下:
df/dt= (3)
经过继电保护测试仪的测试,此时,df/dt的误差可以达到0.1 Hz/s。为了更好地模拟间隙性接地的现象,本研究采用将微机保护的电压输入线与测试仪的电压输出线快速的摩擦滑过。当两根导线快速摩擦时,就是这两根导线时而接触时而不接触,对于微机保护来说,就是电压时有时无时高时低,与间歇性接地非常相似。经过20次~30次实验后,可以复现现场低频减载误动的现象。采用公式(3)的算法后,连续做了50次实验,均没有出现误动的情况;且采用公式(3)的算法,微机保护完美地通过了企业外部数字仿真系统模拟的单相接地的情况,在后续现场的实际使用也没有出现由于系统单相接地导致低频减载误动的情况[5]。
为防止低频减载保护的误动,研究还增加了频率门槛闭锁、低压闭锁、无流闭锁、断路器位置闭锁。
频率门槛闭锁逻辑是当频率低于40 Hz置低频减载闭锁标志位为1,其是为了防止系统频率小于40 Hz导致低频减载动作,因为如果频率小于40 Hz,说明电力系统已经处于异常情况了,此时这种故障就不应该由低频减载处理。
低压闭锁逻辑就是系统的线电压低于“低压定值”时置闭锁标志位为1,其是为了防止发生短路故障引起频率异常导致的误动,因当系统发生短路故障时,故障相对应的电压会降低,而正常低频减载时系统电压是正常的。
无流闭锁逻辑就是当系统的电流小于“无流定值”时置闭锁标志位为1,其是为了防止系统在没有负荷的情况下误动,因正常低频减载时系统肯定是有负荷的,是有电流的,如果没有电流就不存在减负荷的说法了。
断路器位置分闭锁逻辑就是当非重要负荷回路对应的断路器位置分时置闭锁标志位为1,其是为了防止断路器在分位时低频减载动作,因断路器在分位,低频减载动作没有任何意义,只能认定为误动作。
4 结语
文章详细说明采用滑差闭锁低频减载功能中频率滑差计算的过程和详细的算法,以及解决方案,提出了具体验证方法,希望为提高微机保护的动作正确率、提高电力系统的供电质量贡献力量。
参考文献
[1] 孙镜轩,张昊,高浩,等.孤网运行期间变电站站内低频低压减载装置不正确动作分析[J].科技创新与应用,2020(16):58-59.
[2] 范开明.基于电力系统微机型低频减载装置原理与应用概述[J].科技资讯,2019,17(7):47,49.
[3] 王彩丽,王俊辉,白海松,等.10kV线路低频减载误动问题分析及改进[J].电工电气,2017(10):48-50.
[4] 温兴禄,陈振安,卢恒光,等.一种考虑负荷特性的集中式自适应低频减载方案[J].电气时代,2020(7):28-31,41.
[5] 李霞,李岩松,张泽锋,等.基于频率差变化率的快速低频减载方法[J].电气应用,2017,36(8):80-85.