基于模糊控制的某选厂破碎机优化控制实践
2021-01-10 18:37:21王晓永李晓刚
科学与生活 2021年28期
关键词:优化控制
王晓永 李晓刚
摘要:本文提出了将模糊控制算法应用于选矿厂破碎机给矿优化控制,破碎机的控制系统具有大延时、大滞后的特点,从而给破碎机的给矿控制带来了很大的挑战,无法发挥破碎机的最佳工作效率。本文提出的控制策略能很好的应对该问题,对提高我国选矿破碎机的工作状况,有很好的借鉴意义。
关键词:模糊控制系统 破碎机 优化控制 大延时
1引言:我国是矿产资源大国,但铁矿原矿品位较低、同一座矿山品位、硬度变化较大,这就给选矿生产带来很大难度,而矿山的破碎机设备又是处理矿量的关键设备,该设备的处理效率对于矿山的提质、提量是非常关键的设备。当前运行的破碎机设备往往是机旁控制,人工控制,破碎效率不高,本文提出的对破碎机原有控制系统的升级策略能很好的解决这个问题。
2破碎机模糊控制器的设计
破碎机模糊控制器的设计包括以下几项内容:
(1)确定模糊控制器的输入变量及输出变量
实际生产过程中,影响破碎机工作的因素很多。我们选择了几个主要因素其中包括:破碎机料位、破碎机功率、破碎返矿量、破碎粒度。模糊控制器的最后输出是破碎机给矿量、排矿口等。
(2)设计模糊控制器的控制规则
模糊控制规则的设计是设计模糊控制器的关键,包括三部分的设计内容:选择描述输入输出变量的词集,定义各模糊变量的模糊子集及建立模糊控制器的控制规则。
1)选择描述输入量模糊状态的语言变量。
显然选择较多的词汇,对每个变量用较多的状态来描述,制订规则时就比较灵活,控制精度也比较高。但规则多就会大大增加程序量及计算量,控制系统的响应时间也会相应增长,从而会造成系统的滞后响应。一般每个变量宜选用2~10个状态来描述。本项目选用7个状态,它们是:极低、低、较低、正常、较高、高、极高。
2)确定模糊控制规则
在模糊控制中,模糊控制规则通常是由模糊条件语句来描述的。模糊控制器的控制规则是基于专家控制规则策略,因此模糊规则的确定是基于现场操作的经验和控制专家的专业知识。根据模糊语言变量,制订出如下模糊控制规则:
IF 矿量 IS 低 AND 电流IS 低AND 功率IS 低AND 料位IS 低 THEN 矿量IS 较高等等
(3) 确定模糊化和非模糊化的方法
模糊化是将精确量转化为模糊量的过程。模糊控制器的输出是模糊量,它包含了控制量的各种信息,需要把这些模糊量转变成被控对象能够接受的精确的控制量。
1)输入量的模糊化
输入量的模糊化首先需确定精确输入量的基本论域,基本论域确定后可以由事先决定的隶属函数计算输入值的隶属度。隶属函数以三角形、梯形、正态型、矩形等给出。
2)输出量的非模糊化
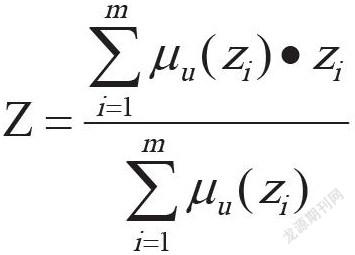
模糊量的非模糊化过程,为了充分利用控制器输出模糊集的所有信息,本项目采用加权平均判决方法,其中的加权系数选择隶属函数,则输出结果可表示为:
3 生产实验效果分析
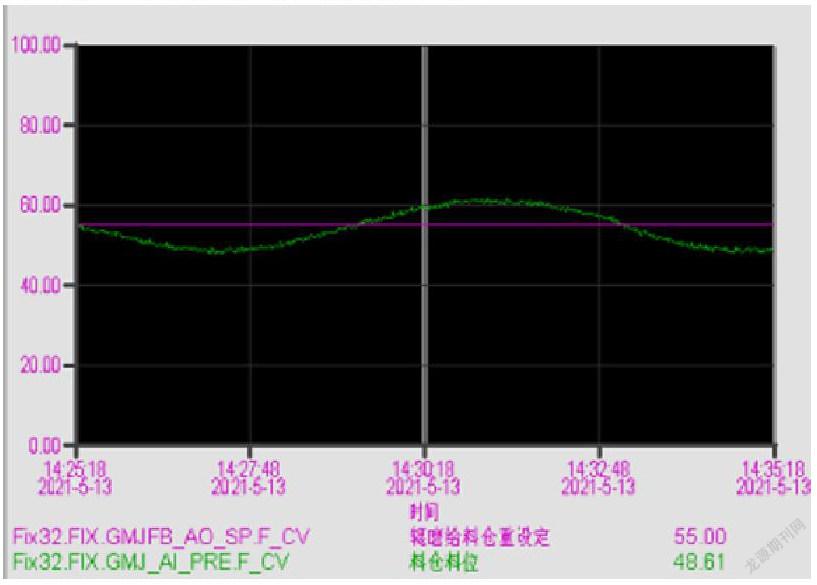
传统手动控制效果如下图:
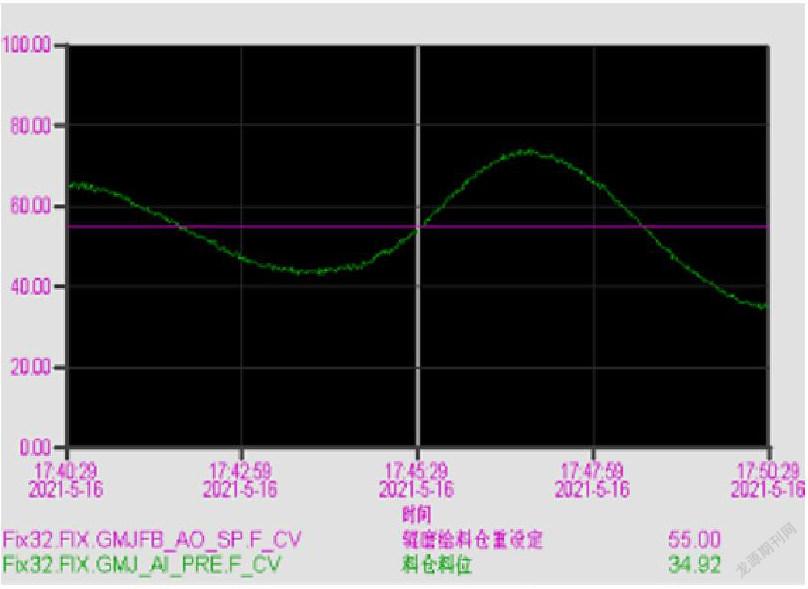
投入模糊控制算法的控制曲线如下图:
通过以上的控制效果对比,破碎机进行模糊控制算法给矿较传统的手动控制提高了反应速度,生产波动范围明显减少,对破碎机效率的提升起到的关键的作用。
4 结论
破碎机优化控制的设计实现了破碎机给矿的优化,对于充分发挥破碎机的工作效率,起到了重要的技术支撑作用,同时,也是减少碳排放的有效手段,对企业做好碳达峰碳中和起到了很好的作用。针对中国国情、厂情,对原有的设备进行优化升级,实用性强,通过破碎机优化控制的实施,提高了破碎机的作业能力和效率,保证最终产品的合格率,对其他选矿企业的破碎机技术升级改造,有很好的借鉴意义。
参考文献
1 《模糊数学原理与应用》 杨纶标 高英仪 华南理工大学出版社
2 《自动控制原理》胡寿松 科学技术出版社
3 《計算机控制》 刘植桢等 清华大学出版社
4 王晓永 孙胡生 模糊多变量控制在某选厂浮选液位控制中的应用 《现代矿业》,2014,3,3,183-184.
作者简介;
王晓永,男(1977-),工学硕士,毕业于东北大学导航制导与控制专业,高级工程师,研究方向:Backstepping等先进控制方法的应用,感兴趣研究方向:数字化矿山技术、选矿过程控制技术、智能巡检机器人。
猜你喜欢
科技创新与应用(2017年5期)2017-03-16 18:52:31
大陆桥视野·下(2017年1期)2017-03-09 05:25:00
中国高新技术企业(2016年34期)2017-02-10 16:42:49
中国科技博览(2016年24期)2016-12-28 22:43:16
科技传播(2016年19期)2016-12-27 15:57:09
现代商贸工业(2016年11期)2016-12-26 10:01:09
科技创新与应用(2016年34期)2016-12-23 19:51:49
中国高新技术企业(2015年35期)2016-03-05 14:15:30
企业导报(2015年18期)2015-11-24 08:44:46
科技与创新(2015年17期)2015-09-11 05:17:29