大型风电叶片动态摄影测量网络优化
2021-01-09 06:49:22董明利
激光技术 2021年1期
丰 伟,董明利*,孙 鹏
(1.北京信息科技大学 光电测试技术及仪器教育部重点实验室,北京 100192;2.北京信息科技大学 机电系统测控北京市重点实验室, 北京 100192)
引 言
风能作为一种绿色环保的可再生能源,是世界各国能源发展的重要方向。在过去十几年,我国的风电装机量已位居世界第一[1]。风电叶片作为风机的重要部件,其空气动力学特性对风机的发电效率和使用寿命有重要影响。为使风机高效安全运行,需要测量运行过程中叶片的运动和形变数据来获得其空气动力学特性。
风电叶片测量方法很多,但这些测量方法多为接触式测量,包括通过在叶片上布设应变片、全球定位系统(global positioning system,GPS)传感器或光纤传感器的方式测量叶片的运动和形变[2-9]。上述测量方法技术成熟,测量精度高,但接触式测量方法需要布设大量的传感器与电缆,使测量过程复杂并增加了测量成本。同时,风机多运行于恶劣环境中,叶片表面的传感器易受环境影响,降低测量精度。摄影测量是一种非接触测量技术,具有精度高、操作简单和成本低等优点,将摄影测量技术应用于风电叶片的测量有着很好的发展前景。
在摄影测量中,为了获得叶片运动的高精度3-D测量数据,需要建立由多台相机组成的摄影测量网络。由于风电叶片位于几十米的高空中,尺寸巨大,而测量相机位于地面,站位数量少、约束条件多,不同站位的测量精度差别很大。为提高风电叶片的测量精度,需要对摄影测量网络进行优化。
网络优化作为摄影测量领域重要的研究内容,在国内外都展开了广泛研究。1984年,加拿大的FRASER已经提出了非地形摄影测量的网络优化问题,并分析了网络优化中的约束条件[10]。2002年,OLAGUE提出了使用遗传算法实现自动摄影测量网络优化[11]。相比国外,国内相关研究起步较晚,多为应用方面的研究及算法改进。2015年,哈尔滨理工大学的QIAO等人采用改进的多目标并列选择遗传算法对大尺寸曲面零件双目视觉测量网络的规划进行了研究[12],兼顾分辨率与覆盖率两个优化目标,有效地解决了双目视觉网络规划问题。2016年,北京信息科技大学的CHEN等人采用遗传算法针对槽式聚光器面形摄影测量进行网络规划[13],得到了最优的相机布局,提高了测量精度。上述优化方法测量时可采用的相机站位多,站位布设灵活,但这些方法都只能应用于尺寸不超过10m的静止物体的静态摄影测量,对于相机站位只有2个,站位的约束条件多,被测物尺寸巨大且处于运动状态的大型风电叶片动态摄影测量并不适用,因此,需要针对风电叶片动态摄影测量中相机站位少、约束条件多等因素,设计其网络优化方法。
本文中研究了大型风电叶片动态摄影测量的网络优化方法,该方法通过3-D重构过程的误差传递建立误差模型,以空间坐标测量误差的标准差作为优化目标,测量时的相机站位为优化变量,通过一种变异改进型遗传算法求风电叶片摄影测量中相机的最优站位[14]。
1 基于变异操作改进型遗传算法的摄影测量网络优化
1.1 摄影测量3-D重构模型
大型风电叶片的摄影测量系统如图1所示。

Fig.1 Camera stations and large wind turbine
图1中,A点代表风机的旋转中心,O点为风机塔柱底部,C,D点代表相机站位,C,D两点关于YOZ平面对称,B点代表相机站位C,D在Z轴上的投影。在拍摄时,左右两台相机对准风机的旋转中心,使风机的旋转中心位于图像正中央。图中,φ1,φ2为绕Y轴方向的旋转角,ω代表相机站位的仰角,由于并未涉及到Z方向的旋转,绕Z方向的旋转角κ=0。由此可以推出C,D站位的旋转矩阵RC,RD分别为:

(1)
结合图1与(1)式,C,D两点相机的成像过程可由下面的共线方程组得到:
fx1:x1=
fy1:y1=
fx2:x2=
fy2:y2=

(2)
式中,(x1,y1)代表C点相机拍摄的被测点像面坐标,(x2,y2)代表D点相机拍摄的被测点像面坐标,f为相机主距,X,Y,Z代表被测点的空间坐标,(-XC,YC,ZC)和(XC,YC,ZC)分别代表C点和D点相机位置的空间坐标,RC,ij和RD,ij(i,j=1,2,3)代表(1)式中两台相机相机坐标系与空间坐标系相互转换的旋转矩阵中的元素。将共线方程线性化,可以利用光线束平差求解目标点的最优坐标值。对(2)式进行1阶泰勒展开并转化为矩阵形式,可得到下式:

(3)
式中,hx1,hy1,hx2,hy2为像面坐标的测量值和计算值的差值,F为差值矩阵,(X0,Y0,Z0)为泰勒展开时被测点空间坐标的初始值,其中dfxk/dX,dfxk/dY,dfxk/dZ,dfyk/dX,dfyk/dY,dfyk/dZ(k=1,2)为(2)式中各式对空间坐标的偏导数,J为偏导数矩阵,δX0,δY0,δZ0为空间坐标的修正值,在迭代过程中不断修正初始值。将上式化简变形可得到空间坐标修正值:

(4)
将(4)式代入最小二乘迭代,不断修正空间坐标。随着迭代次数增加,坐标值不断接近真实值。
1.2 空间坐标测量误差的标准差
空间坐标测量误差的标准差可以由(4)式通过协方差传播率推导得到。
Dδ=(JTJ)-1JTDF[(JTJ)-1JT]T
(5)
式中,Dδ是空间坐标修正值的协方差矩阵,DF是像面坐标的协方差矩阵。在理想状态下,各像面点相互独立,所有像面点坐标误差水平相同,则像面点的协方差矩阵DF为像面点定位误差标准差的平方σF2与单位矩阵E的乘积,如下式所示:
DF=σF2E
(6)
将(6)式代入(5)式,得到空间坐标修正值的协方差矩阵。
Dδ=σF2(JTJ)-1
(7)
Dδ的对角线元素分别为σX2,σY2,σZ2,其中σX,σY,σZ为被测点在X,Y,Z3个方向上误差的标准差。将像面定点误差标准差代入(5)式,求不同被测点的Dδ矩阵,并对Dδ的对角线元素的平方根求均值,记作在当前相机站位下空间坐标测量误差的标准差,如下式所示:

(8)
式中,n为被测点数。
1.3 基于变异改进型遗传算法的网络优化方法
本文中提出一种变异改进型遗传算法作为网络优化方法。在遗传算法中,种群经过多次迭代优化后,可以得到适应度较高的次优站位,该站位与最优站位在空间位置上十分接近。在对该站位的变异操作中,传统的变异方法通过随机替换站位中的参量来实现变异,这种方法随机性太强,反而有可能劣化当前的次优站位。本文中通过改进变异方法,检索当前站位相邻区域,提高了局部搜索能力,可以更快地检索到与次优站位接近的最优站位,进而提高收敛速度。具体流程如图2所示。
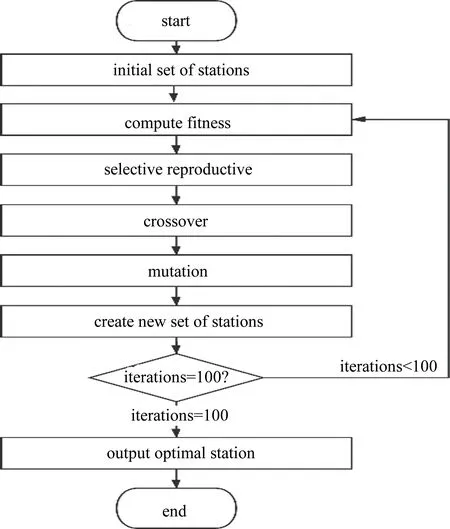
Fig.2 Flow chart of network optimization algorithm
(1)初始化种群:根据实际情况建立约束条件,选择多组满足约束条件的相机站位,采用实值编码建立初始站位集合(初始种群)。
(2)计算适应度:根据(8)式计算站位集合中各站位的空间坐标测量误差的标准差,以标准差的倒数作为适应度,如下式所示:

(9)
式中,S为适应度,σ为标准差。
(4)选择复制:根据站位集合中各站位的适应度选择站位进行复制,适应度高的站位被选择的概率高,被选择的站位继续进行交叉变异操作。
(5)交叉:随机将种群中序号接近的站位X,Z坐标进行交换,例如将P1,P2两站位交叉得到新的站位P3,P4。
(10)
(6)变异:这里的变异指的是将站位坐标在相邻区域内进行随机位移。这种变异方法局部搜索能力更强,收敛更快,如下式所示:
Pold(X,Z)⟹Pnew(X±a,Z) orPnew(X,Z±a)
(11)
式中,a为随机位移量,Pnew和Pold是新、旧站位。
(7)建立新种群:将经过交叉变异之后的站位重新计算适应度,根据适应度选取站位生成新的站位集合,继续迭代。
2 仿真实验和结果
如图1所示,在仿真实验中,以轮毂高度80m,叶片长度40m,风轮直径80m的1.5MW风机作为被测物,将两台相机对称地布设在风机正前方的水平地面上,在风机叶片上均匀地布设被测点。
2.1 种群约束条件
仿真实验过程中,应对站位集合中的站位设立约束条件,使求得的站位具有合理性和可行性。
2.1.1 相机距离约束 在实验过程中为了使风机叶片上所有的被测点都能被相机采集到,必须对相机镜头光心到风轮中心的距离做出限制。

(12)
式中,L是相机光心到风机旋转中心的距离,D是风轮直径,d是相机拍摄图像的最小尺寸,f是相机主距。例如在仿真实验时,大型风机的叶片长度为40m,风轮直径为80m,仿真相机拍摄的图片尺寸为4872pixel×3248pixel,像素尺寸为7.4μm,主距为20mm,那么L应大于67m。
2.1.2 拍摄角度约束 在摄影测量中,回光反射目标点具有可视角度范围,为了得到被测点明亮清晰的图像,应对被测点所在平面与相机光轴的夹角做出相应的约束。该约束在风电叶片测量中体现为相机光轴与叶片旋转平面的夹角大于30°。
如图3所示,角α,β代表相机与风轮上极限位置处被测点T(XT,YT,ZT)的连线与风轮所在平面的夹角,可视角度约束条件可通过下式体现:

(13)
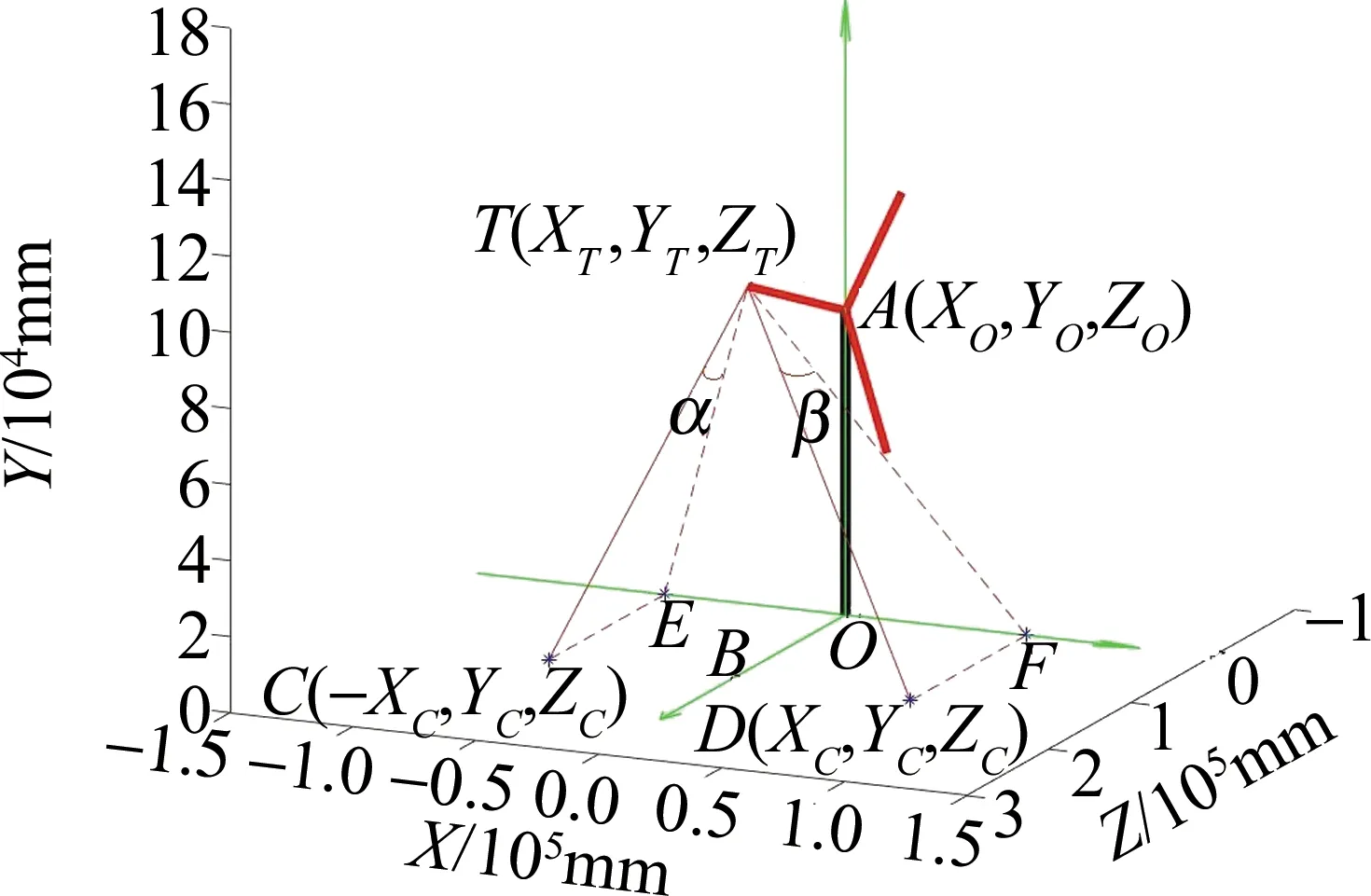
Fig.3 The angle between the optical axis of the camera and the plane of the wind wheel
2.2 仿真实验
2.2.1 像面点定位误差的标准差 在仿真实验中采用空间坐标测量误差的标准差作为优化目标,需要确定像面点定位误差的标准差。摄影测量目标点定位精度一般在1/20pixel。这里采用的相机像素尺寸为7.4μm,则像面点定位误差的标准差为0.37μm,再结合(7)式和(8)式就可以得到相机位于该站位时空间坐标测量误差的标准差。
2.2.2 仿真实验结果 在网络优化的仿真实验中,选取28对均匀散布的对称站位作为初始站位集合,如图4所示。
图中每一对关于Y-O-Z平面对称的三角形代表站位集合中的一组站位,每组2个站位Z坐标相等,X坐标互为相反数,Y坐标代表高度,由于相机位于地面,默认Y坐标为0。阴影区域为不满足第2.1节中所提到约束条件的站位区域。将初始站位集合代入第1.3节中所述的网络优化算法,迭代一定次数得出最优站位。最优站位的空间坐标测量误差标准差和所有站位标准差均值的变化曲线如图5所示。
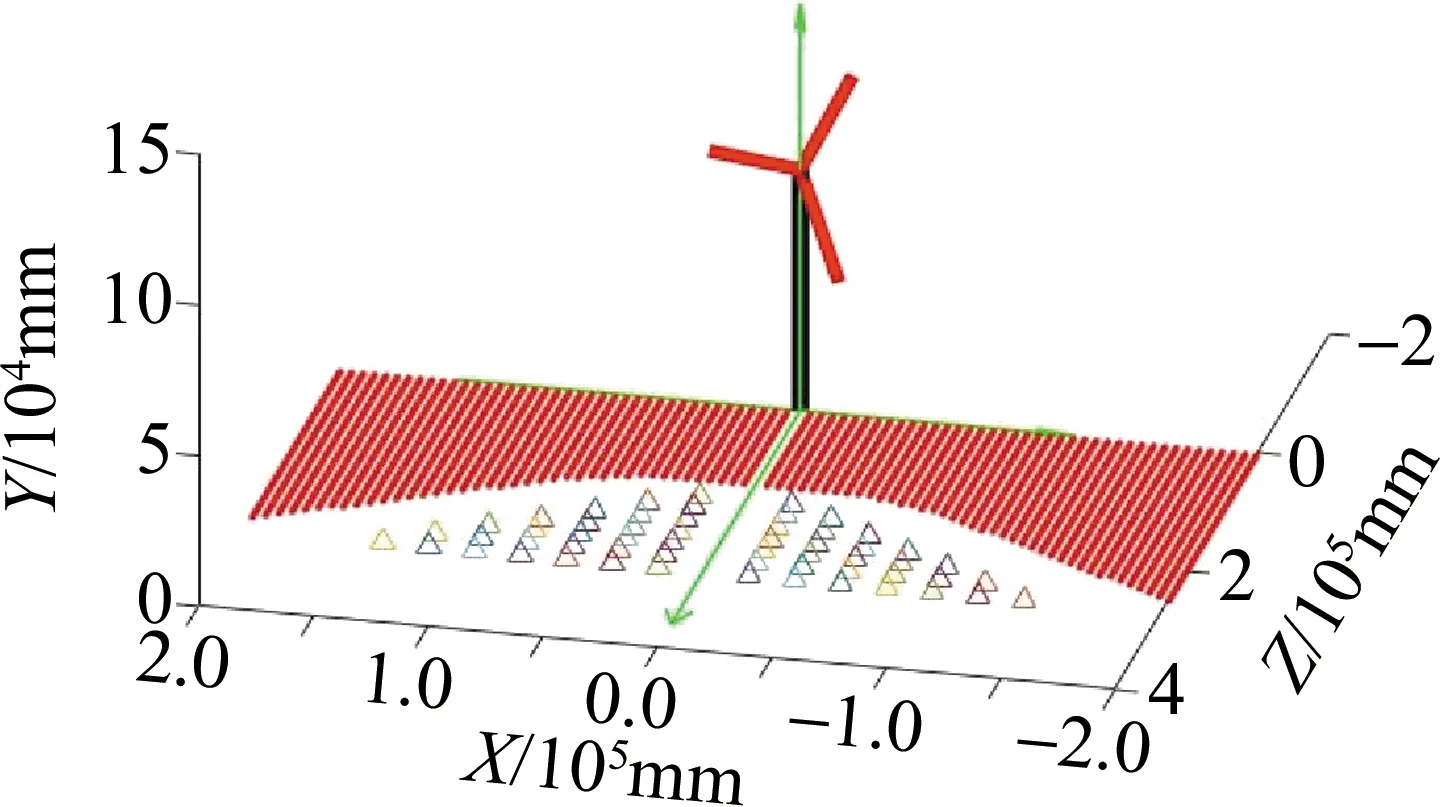
Fig.4 Initial set of stations
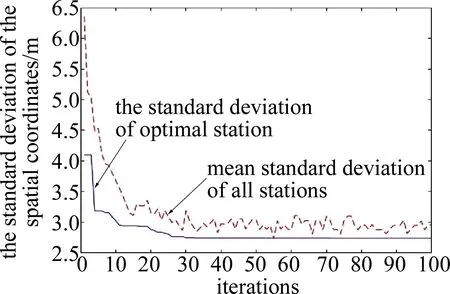
Fig.5 Variation of the standard deviation of the optimal station and the mean standard deviation of all stations
由图5可知,随着迭代次数增加,最优站位的空间坐标标准差不断减少并最终稳定于2.7mm。种群中最优站位的X和Z坐标随迭代次数增加的变化如图6和图7所示。
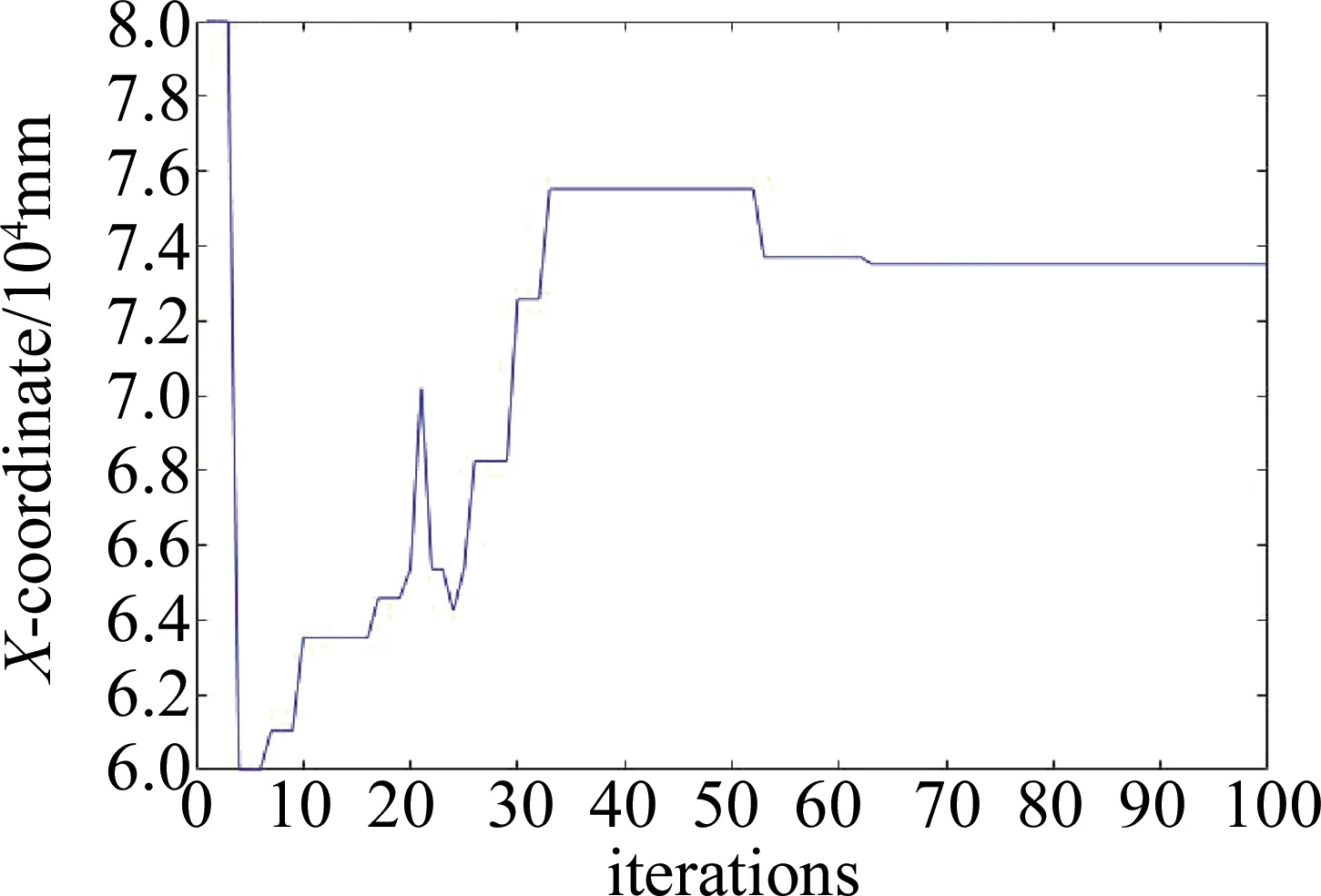
Fig.6 Variation of the X-coordinate of the optimal station with iterations

Fig.7 Variation of the Z-coordinate of the optimal station with iterations
在前30次迭代时,当前种群的最优站位的X,Z坐标变化明显,迭代次数超过70次后,相机站位的X坐标收敛于73.5m,Z坐标收敛于140.8m。仿真实验中网络优化的结果如表1所示。
由表1中数据可知,在仿真实验中,最优的一组相机站位坐标为(-7.352×104,0,1.408×105)与(7.352×104, 0,1.408×105)(单位为mm),相机位于该组站位时,空间坐标测量误差的标准差为2.7mm。

Table 1 The standard deviation and coordinates of the optimal station in iteration
3 实测实验与结果
3.1 实测实验
在实测实验中,采用叶片长度为3.5m的风机模型为被测物,在上面均匀布设被测点,如图8所示。

Fig.8 Experimental site and the turbine to be measured
使用V-STARS摄影测量系统测量被测点的空间坐标作为后续相机站位优化实验中被测点的坐标真值。实测实验中采用两台联合视觉技术(allied vision technologies,AVT)高精度工业相机拍摄图像,其分辨率为4872pixel×3248pixel,像素尺寸为7.4μm,镜头焦距为20mm。
将两台相机布设完毕,触发相机同时拍摄,使用动态摄影测量软件对拍摄的图片进行处理,得到每个目标点的空间坐标值。
3.2 实测数据及分析
先将仿真得到的最优站位等比缩放,将相机布设在最优站位进行拍摄测量,再选择多个随机站位拍摄测量,计算相邻目标点间的距离,与V-STARS系统拍摄得到的真值对比,得到的数据如表2所示。
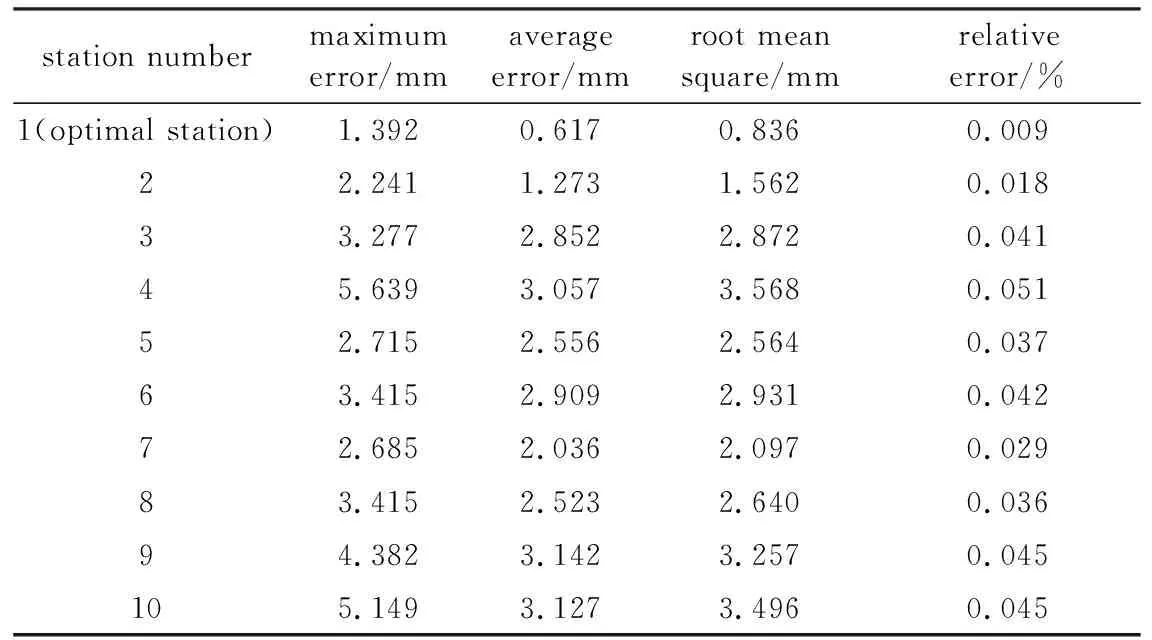
Table 2 Comparison of measurement results between optimal and stochastic stations
表2中,站位1为仿真得到的最优站位,其余站位为随机站位。由表中数据可知,当相机位于站位1时,测量误差小于所有的随机站位,证明当相机位于网络优化后的最优站位时,其摄影测量的精度最高。
4 结 论
针对大型风电叶片动态摄影测量的网络优化问题,本文中以摄影测量3维重构时产生的空间坐标测量误差标准差为优化目标,根据摄影测量中的约束条件对站位做出限制,设计变异操作改进型遗传算法为基础的网络优化算法,通过该算法在仿真实验中得到了相机的最优站位。在实测实验中,当相机位于最优站位时,其测量精度优于其它站位,为风电叶片摄影测量的网络优化提供了理论技术支持。
猜你喜欢
今日农业(2021年8期)2021-11-28 05:07:50
水上消防(2021年3期)2021-08-21 03:12:00
当代医药论丛(2021年3期)2021-03-17 07:03:12
人大建设(2019年5期)2019-10-08 08:55:10
能源(2018年5期)2018-06-15 08:56:02
能源(2017年9期)2017-10-18 00:48:27
现代工业经济和信息化(2016年12期)2016-05-17 05:37:47
安徽冶金科技职业学院学报(2015年3期)2015-12-02 03:46:38
赤峰学院学报·自然科学版(2015年15期)2015-03-21 00:30:56
发明与创新(2013年16期)2013-03-11 15:54:21