
基于光流定位的室内无人机自主避障研究
2021-01-08 02:16周洲陈祥祥汪玲丁志斌彭渴望胡明敏
无线互联科技 2021年23期
周洲 陈祥祥 汪玲 丁志斌 彭渴望 胡明敏

摘 要:无人机的研究逐步成为当今的热点,尤其是旋翼无人机,其具有空中悬停、机动性好等优势,适合在低空环境中执行侦察及目标捕捉等任务。因而成了各大高校的研究对象。文章以一架小型四旋翼无人机为平台,设计了无人机在无GPS定位情况下,通过光流定位模块及飞控接收信息,进而利用激光测距实现无人机室内自主避障。
关键词:室内无人机;光流定位;激光避障
1 研究的背景和意义
随着科学技术的发展,无人机的研究成了当今热点。由于其具有垂直起降、机动性好等方面优势,特别适合在低空环境中执行侦察、及目标捕捉等任务。因而成了各大高校和研究机构的研究对象。然而无人机的室内飞行面临着诸多技术问题。首先是无人机室内定位导航技术,如何在室内环境中实现无人机精确定位是其实现室内飞行的重要前提条件。其次是无人机的实时运动控制、对目标和障碍物的检测等。对于这些技术难题,2014年国际空中机器人大赛提出了第七代任务,要求无人机在室内无外界辅助导航的情况下对多个地面机器人进行交互。在此发展背景下,不论是各大学实验室,还是科技公司,都加入无人机的研发和应用行业。
本项目主要是为达成室内无人机在无GPS支持的工况下实现室内自主避障与精确定位飞行,通过飞控接收不同的信息,从而实现无人机的避障飞行。
2 四旋翼无人机平台的整体设计
采用F450多旋翼无人机,整个系统主要有4个部分组成,一是飞行控制模块,本文选用的是开源的飞控开发板;二是系统的导航模块;三是避障模块,采用激光避障模式;四是上位机,用来接收飞控数据。
2.1 飞行控制器
匿名飞控凌霄,其源码可因后续开发需要进行编写,添加新程序实现不同的功能。
2.2 避障系统
TFmini-S是一款高性价比激光测距模组。在保证12m量程(@90%反射率)的基础上,TFmini-S据有精度高、盲区小、低功耗等优势,在智能无人场景中,保证实时非接触式高精度测量体验。
2.3 光流传感器
光流定位是借助无人机底部的一个摄像头采集图像数据,然后采用光流算法计算两帧图像的位移,进而实现无人机在室内无GPS信号的情况下高精度定位,达到更加平稳的控制[1]。
3 无人机的避障策略
3.1 激光测距系统原理
本系统基于TOF(Time of Flight)即飞行时间原理,使用 TFmini-S模块可对障碍物实施测距,该模块可对外发射周期性近红外光调制波,该波遇到障碍物后发生反射。从而通过测量调制波往返相位差得到飞行时间,再经过一系列算法,可得与障碍物之间的距离[2]。
通过调用匿名飞控程序优化算法,从而实现加装TFmini-S模块的无人机,完成自主避障的预期目标。
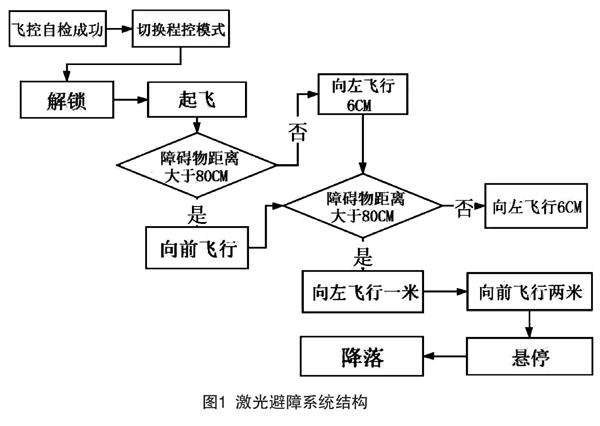
3.2 激光避障系统结构设计
在自动任务中执行避障的程序流程如图1所示。
3.3 通信协议
采用UART方式接收数据,TFmini发送数据遵循标准通信协议(见表1)。
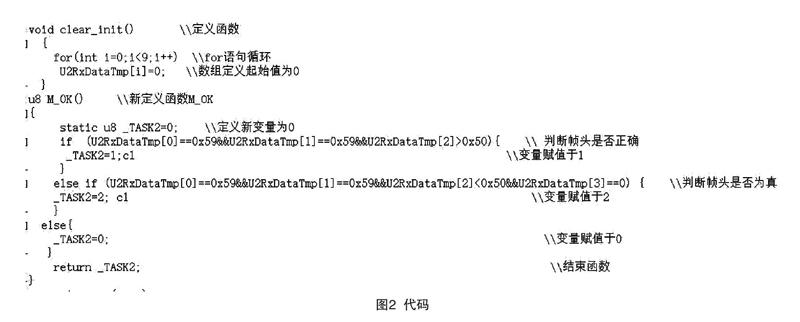
3.4 代码解析
对代码通讯执行判断,判断飞机的飞行条件。具体代码如图2所示。
4 结语
此项目采用便捷轻巧多旋翼无人机,加载光流进行精确定位,遵循通信协议的前提下,进行TM模块测距算法优化,从而实现自主避障。
因室内光照环境不明,探测元件在感知外部环境信息时无法准确获取障碍物信息,室内布局不明朗,对飞行器机械结构和工作原理进行分析,定位和避障系统能够满足在普通室内环境中自主飞行的能力,可通过搭载相关设备执行多种室内任务。
[参考文献]
[1]金正康,秦工,李朝阳,等.光流定位自主无人机的研究与应用[J].电子测试,2020(19):52-55.
[2]薛喜地.基于深度强化学习的室内无人机避障[D].哈尔滨:哈尔滨工业大学,2020.
(编辑 傅金睿)
Study on autonomous obstacle avoidance of indoor UAV based on optical flow positioning
Zhou Zhou, Chen Xiangxiang, Wang Ling, Ding Zhibin, Peng Kewang, Hu Mingmin
(College of Automotive Engineering, Nanjing University of Technology Pujiang, Nanjing 211100, China)
Abstract:The research of UAV has gradually become a hot spot, especially the rotor UAV, which has the advantages of hovering in the air and good mobility, and is suitable for reconnaissance and target acquisition in low altitude environment. Therefore, it has become the research object of universities. In this paper, a small four rotor UAV is used as the platform to design a UAV. In the case of GPS positioning, the UAV can receive information through optical flow positioning module and flight control, and then realize autonomous obstacle avoidance indoor by laser ranging.
Key words:indoor UAV; optical flow positioning; laser obstacle avoidance
作者簡介:周洲(1999— ),男,江苏沭阳人,本科生;研究方向:汽车服务工程。
