基于残差统计的三类北斗卫星随机模型估计与特性分析
2021-01-08 10:49:42王忠智苗维凯沈云中
测绘工程 2021年1期
王忠智, 苗维凯,沈云中
(同济大学 测绘与地理信息学院,上海 200092)
GNSS观测值的随机模型应该充分反映其物理相关性,包含不同卫星之间的空间相关性、不同类型观测值之间的交叉相关性和观测历元之间的时间相关性。 考虑物理相关性的随机模型对GNSS高精度定位至关重要[1]。早期GNSS随机模型主要采用高度角相关模型[2],根据卫星高度角对卫星观测值进行加权;后来考虑了时间相关性和交叉相关性两因素的影响[3-4],此时随机模型对基线解算结果影响不大,但是随机模型能够较为精准定位;同时研究基于信噪比的随机模型[5],利用C/N0(1赫兹带宽内载波信号与噪声功率之比)估计相位观测值的方差。自相关、交叉相关函数和湍流理论[6]等方法用于分析物理相关性,方差分量估计(VCE)法也广泛用于估计多种类型GNSS观测值的随机模型[7]。
传统随机模型对所有卫星的同一类型观测值按相同精度模型进行高度角相关定权。然而,北斗系统包含静止轨道(GEO)、倾斜轨道(IGSO)和中轨道(MEO)三类卫星,忽略观测值间的相关性对北斗系统影响比GPS系统更为显著,因此需要更准确估计和分析北斗观测值的随机模型。基于Geometry-based函数模型,本文直接利用观测值残差估值使用自相关函数和交叉相关函数计算北斗三类卫星不同类型观测值的物理相关性。在此基础上,进一步分析了北斗卫星观测值高度角相关的精度、交叉相关性、空间相关性和时间相关性的特性。
1 基于几何的单差函数模型
为了获得北斗观测误差进行随机模型估计,必须要消除观测值中的系统误差。考虑到在短基线或零基线情况下,接收机间单差可消除观测值的系统误差,且该单差观测值不存在数学相关性,与双差观测值相比更利于估计单颗卫星的方差[8]。因此,以接收机间单差观测值为基础进行随机模型估计。
假设参考站和移动站同时跟踪s颗卫星,则短基线单历元单差观测方程在频率j的形式为[8]:
(1)

单差整周模糊度aj和接收机钟差δtj相关,因为系数λj,Is和es满足:
(2)
所以需要重新参数化:
(3)
(4)
重新参数化的观测方程为:
(5)

随后,将利用长时间观测值计算得到的基线向量和模糊度作为已知值,代入观测方程(5),得到基线向量和模糊度已知的单差观测方程:
(6)

2 考虑物理相关性的随机模型
估计出各类观测的残差,直接利用残差估值,按下列方法分别计算各类观测值的方差因子,空间相关性,交叉相关性和时间相关性。
2.1 各类观测值的方差因子
根据自相关函数,对于K个历元的观测值,第s颗卫星观测值方差分量为:
(7)

为了验证自相关函数和交叉相关函数估计各类观测值的方差因子,空间相关性,交叉相关性和时间相关性的可行性,本文采用MINQUE方法,对各类型观测值的方差进行准确估计,并与直接利用残差估值使用自相关函数计算得到的方差进行比较。
MINQUE方差分量估计方法解算策略为K个历元滑动解算s颗卫星两个频率伪距和相位观测值的方差因子。K个历元的方差矩阵为[10]:
(8)
式中:k表示未知的方差分量σi的个数(k=4×s),Ui为与σi对应的系数矩阵(待估参数位置元素为1,其余位置元素为0)。则σi用下式计算:
(9)
其中
S=tr(CUiCUj),
C=Q-1-Q-1B(BTQ-1B)-1BTQ-1,
W=[VTCU1CV,VTCU2CV,…,VTCUkCV]T.
将两种方法计算得到的每颗卫星每个历元各类观测值的方差取平均值作为观测值最终的方差,并对每类观测值的标准差进行比较,如表1所示。用B1C和B1L表示B1频率的伪距和相位观测值,B2C和B2L表示B2频率的伪距和相位观测值。
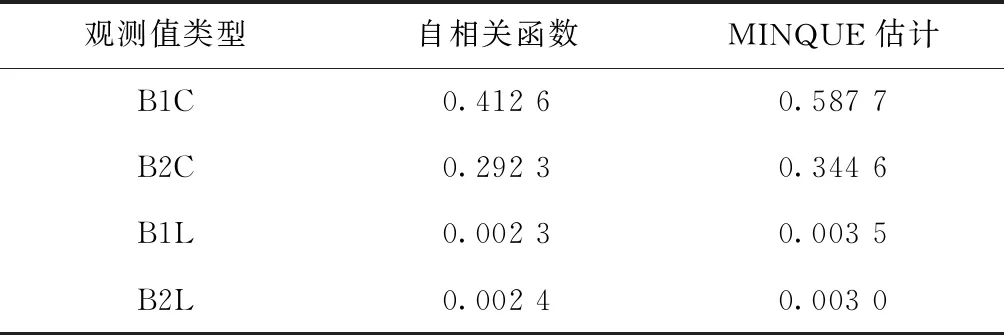
表1 自相关函数和MINQUE两种方法估计的各类观测值精度比较 m
通过对比两种方法计算得到的各类观测值的精度可以看出:直接利用残差估值,使用自相关函数估计得到的观测值精度与MINQUE方法估计得到的观测值精度具有较好的一致性,证明此种简单的估计方法是可行的。考虑到在估计空间、交叉及时间相关系数时待估参数数量大,MINQUE方差分量估计方法计算效率将会大大降低,因此,在接下来对空间、交叉和时间相关系数进行估计时均采用交叉相关函数。
2.2 同类观测值不同卫星间的空间相关性
在单差模式下,空间相关性定义为不同卫星的同一类型观测值在同一历元的相关性。根据交叉相关函数,对于K个历元的观测值,观测值残差和的空间相关系数定义为:
(10)

(11)
2.3 同一卫星不同类型观测值的交叉相关性
交叉相关性被定义为同一卫星的不同类型观测值在同一历元的相关性。根据相关系数的定义,对于K个历元观测值,交叉相关系数为:
(12)
式中:p,q表示观测值类型,且ρpq=ρqp,第i个历元所有观测值的方差阵Qi为:
(13)
式中:Cpq和Cqp表示对角的交叉相关系数矩阵,
Cqp=diag(ρqp(1),…,ρqp(s)),Cpq和Cqp的形式相同。
2.4 同一卫星同类型观测值的时间相关性
时间相关性被定义为同一卫星的同一类型观测值在历元之间的相关性。根据自相关函数的定义,历元间隔为τ的时间相关系数定义为:
τ=|i-j|,(i,j=1,…,K).
(14)
其中
因此,K个历元观测值的随机模型可以表示为下面的形式:
(15)

3 实验结果和分析
3.1 数据描述
本文采用三种类型的双频北斗接收机收集4组北斗数据,采样率为30 s,一组零基线,其余为短基线,具体信息见表2。在数据处理中,截止高度角设置为15°,直接利用观测值残差估值使用自相关和交叉相关函数估计物理相关的随机模型。
3.2 北斗随机模型的分析
在传统随机模型中,码和相位观测值的精度通常设置为0.2 m和2 mm,且忽略观测值之间的物理相关性。而对于北斗系统,导航星座由GEO、IGSO和MEO卫星构成,其随机模型分别进行估计和分析。
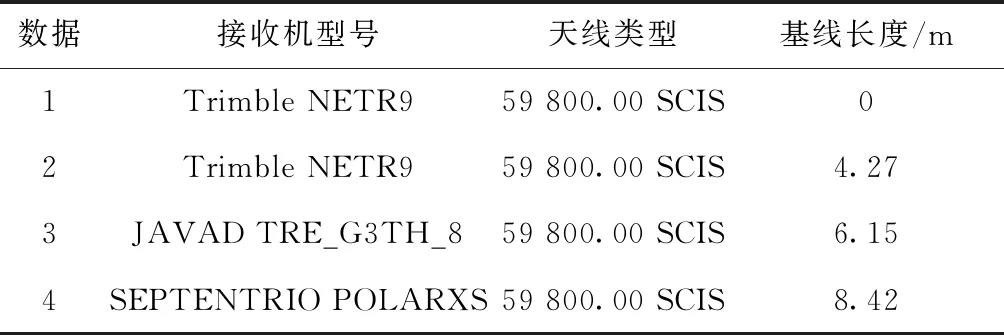
表2 北斗观测数据信息
3.2.1 观测值精度分析
以数据4为例对三类卫星的观测值精度进行分析。定时间窗口K=6,直接利用残差估值计算每颗卫星每个频率的载波相位和码观测值的方差,按照高度角对观测值标准差进行排序,结果如图1所示,其中不同颜色表示不同卫星的标准差。由图1可见,观测值精度与高度角相关,因此采用式(16)对三类卫星精度进行拟合[11]:
σ=a1+a2e-θ/θ0.
(16)
式中:σ表示在卫星高度角为θ时的观测值标准差,a1和a2表示未知参数,θ0表示未知的参考高度角。
拟合曲线在图1中标出,其中蓝色和红色曲线分别表示B2和B1频率的方差拟合结果;显然,B1频率伪距观测值的精度高于B2频率,而两个频率相位观测值的精度相当。在同一高度角下,GEO卫星两个频率的伪距和相位观测值精度都低于IGSO和MEO卫星,说明对所有卫星的同一类型观测值采用同一精度指标是不合理的。因此,在实际应用中对GEO卫星的观测值应适当降权。
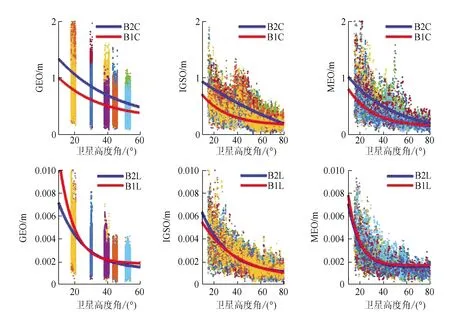
图1 数据4的三种卫星高度角相关的精度
表3给出了三类卫星相位和伪距的拟合参数,其中表示拟合误差的标准偏差,伪距观测值的单位为米,相位观测值的单位为毫米。可看出GEO卫星的伪距和相位拟合误差均大于IGSO和MEO卫星,IGSO卫星的拟合误差最小。
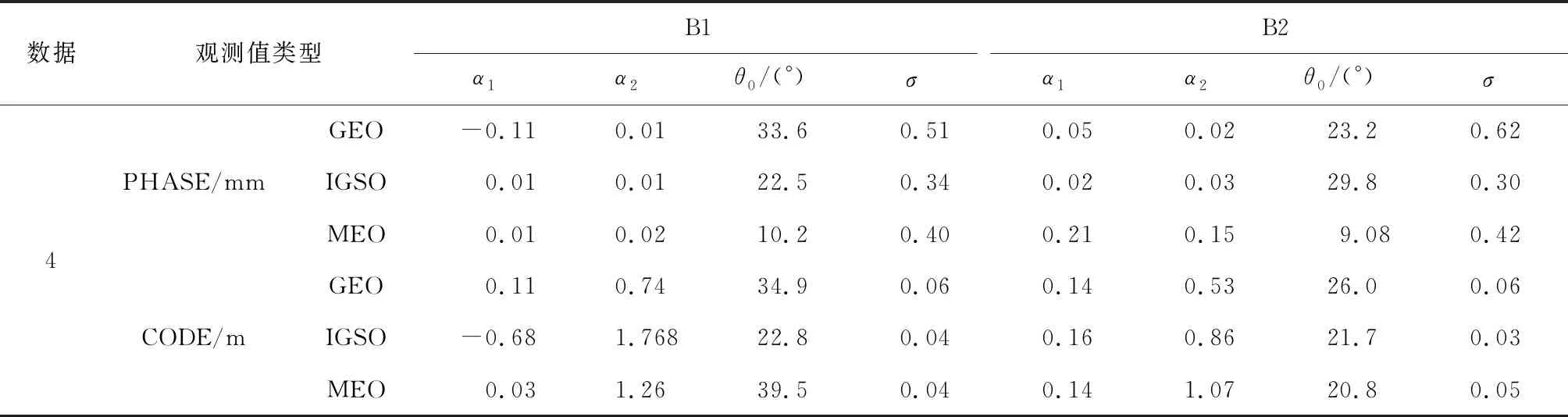
表3 数据4相位和码观测值的高度角相关拟合模型
3.2.2 交叉相关性分析
利用四组数据分析卫星观测值间的交叉相关性。对于给定的时间窗口,每颗卫星的双频观测数据共估计6个交叉相关系数,数据1全部卫星观测值的交叉相关系数如图2所示,其中蓝色表示5颗GEO卫星的交叉系数,绿色表示5颗IGSO卫星的交叉系数,红色表示4颗MEO卫星的交叉系数。
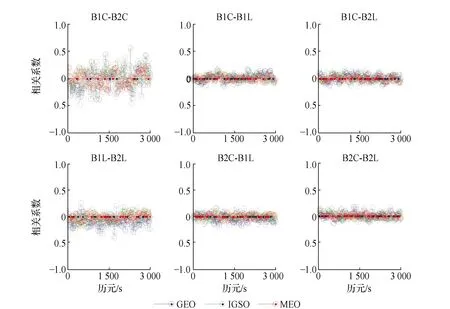
图2 数据1的交叉相关系数
由于伪距观测值的噪声较大,伪距解算结果的噪声比相位更大。在图2中,三类卫星的伪距和相位之间(B1C-B1L、B1C-B2L、B2C-B1L、B2C-B2L)的交叉相关系数总体上接近0。对于同一类型观测值两个频率之间表现出较强的相关性,GEO卫星B1C和B2C之间的平均交叉相关系数高达0.32,这说明对于Trimble NETR9接收机存在交叉相关性,在实际处理中交叉相关性不可忽略。
表4给出不同类型接收机的平均交叉相关系数,其中BC-BL表示B1C-B1L、B1C-B2L、B2C-B1L、B2C-B2L的平均值。不同接收机的观测值相关程度不同,主要由接收机内部因素影响。数据1和2对应同一种接收机,B1C和B2C、B1L和B2L显著相关,但相位和伪距之间的交叉相关性很小。对于数据3,B1C和B2C之间存在弱负相关,伪距和相位在不同频率之间基本是独立的。对于数据4,两个频率的伪距和相位观测值基本不存在交叉相关。
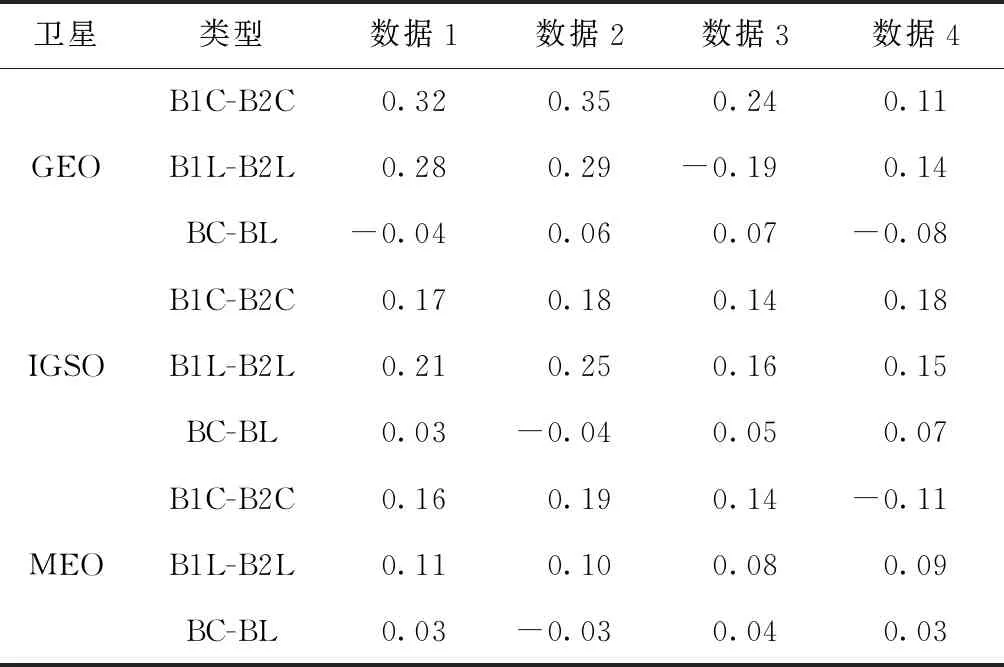
表4 四组数据的平均交叉相关系数
3.2.3 空间相关性分析
利用数据2对三类卫星间的空间相关性进行分析。在给定的时间窗口K=6下,计算任意两颗卫星间四种类型观测值的空间相关系数,假设某一历元下观测n颗卫星,总共有4n×(n-1)/2个空间相关系数,数据2的空间相关系数如图3所示。

图3 数据2的空间相关系数
图3中,G表示GEO卫星,S表示IGSO卫星,M表示MEO卫星。总体上两个频率伪距观测值的空间相关系数大于相位观测值的空间相关系数。表5给出四组数据不同卫星之间空间相关系数的平均值。从表中可知,对于四组数据,GEO-GEO、GEO-IGSO和GEO-MEO的空间相关系数比其他类型卫星之间的空间相关系数略大。并且GEO-GEO、GEO-IGSO和GEO-MEO的空间相关性呈由大到小的趋势,推测主要原因是GEO卫星相对地面几乎静止,IGSO相对地面运行的速度也较MEO卫星小。
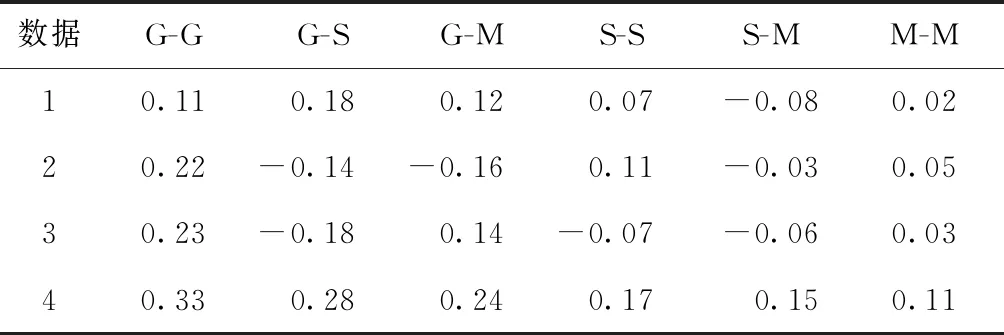
表5 四组数据的平均空间相关系数
3.2.4 时间相关性分析
利用数据1和2分析三类卫星观测值的时间相关性。采用式(14)计算每颗卫星每类观测值的时间相关系数,对同一类卫星的同一种观测值取平均作为图4和5中的结果。
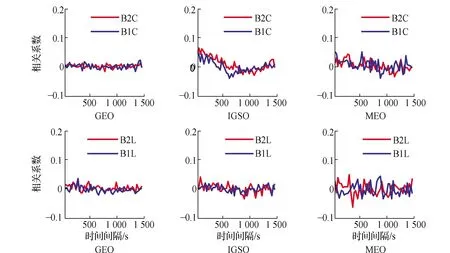
图4 数据1的时间相关系数
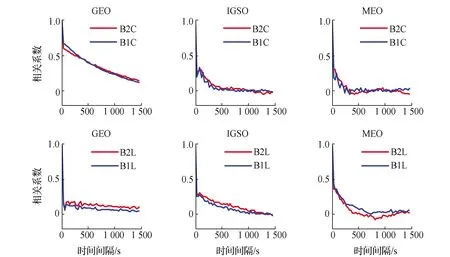
图5 数据2的时间相关系数
图4显示零基线时间相关性非常小,几乎接近零。主要原因是测站之间相关性太强,差分基本消除了全部误差,观测噪声只剩下时间不相关的白噪声。
随着基线的增长,差分观测值会受外部环境的影响,观测值噪声增大,且观测噪声中包含的有色噪声项使得观测值时间相关。图5给出的短基线结果验证了观测值具有时间相关性。
图5中,对全星座卫星,时间相关性在30 s的时间延迟内急剧下降,随着时间延迟的增大而逐渐减小。时间相关性在不同频率和不同类型观测值之间也不同。对于GEO卫星,随着时间延迟的增大,相位观测值的时间相关系数稳定在0.1左右;伪距观测值的时间相关系数下降较为缓慢,GEO卫星地球静止的特性是造成该结果的主要原因。对于MEO和IGSO卫星,同类型不同频率观测值的时间延迟相当,且随着时间延迟的增大,时间相关系数逐渐接近零。表6给出了四组数据的平均时间相关系数。
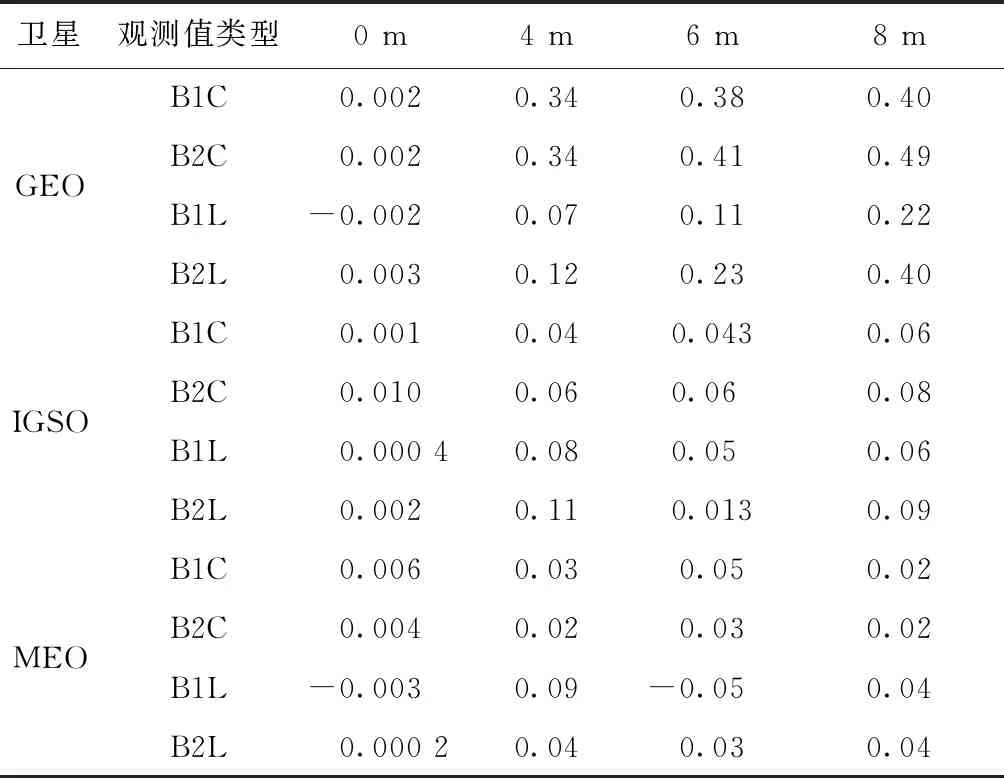
表6 四组数据的平均时间相关系数
4 结 论
本文主要研究北斗观测值物理相关的随机模型,基于几何观测模型,通过与MINQUE方差分量估计方法的随机模型进行比较,验证直接利用观测值残差估值估计随机模型的有效性,分析了北斗卫星四种类型观测值高度角相关的精度、交叉相关性、空间相关性和时间相关性。实验结果表明:北斗对地静止轨道(GEO)卫星的观测误差、空间相关性、时间相关性均大于倾斜同步轨道(IGSO)卫星和中轨道(MEO)卫星。因此,在实际应用中应适当降低GEO卫星观测值的权重;北斗卫星的同类型观测值之间均具有较强的交叉相关性,不同类型观测值间的交叉相关性较弱;且随机模型的估计结果受接收机的内部误差和测站的外部误差影响。
猜你喜欢
中学生数理化·七年级数学人教版(2023年6期)2023-05-25 12:17:42
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09 06:09:10
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:32
初中生世界·九年级(2017年10期)2017-11-08 21:30:36
测绘科学与工程(2017年3期)2017-08-16 02:46:08
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
测绘通报(2016年12期)2017-01-06 03:37:13
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38