雷达抗战场复杂电磁干扰仿真实验主控航迹数据处理
2021-01-07 10:54童源,朱兵,闵啸
舰船电子对抗 2020年6期
童 源,朱 兵,闵 啸
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
雷达抗战场电磁干扰仿真实验平台能够模拟雷达在战场中的典型电磁环境,对系统进行标定标校,旨在借助部分真实环境,通过在运动平台上架设的模拟器模拟目标、杂波、干扰来构建逼真度良好的典型雷达电子战对抗场景,满足不同体制的被试雷达在试验平台上进行抗自卫式、支援式或复合式干扰试验需求,并在综合视景大屏上显示,最终能够输出、存储相应的数据支撑抗干扰效能评估。本文重点阐述试验平台中主控显示分系统航迹数据处理。如图1所示[1]。

图1 航迹数据处理流程
主控机显控软件接收综合模拟控制视景显示及数据录取设备的航路场景设置,通过解算,将设置场景航路大地坐标系转换为以雷达为原点的直角坐标系,然后将转换后的航路坐标及目标信息下发摇臂及模拟器。
1 航迹数据生成
航迹数据生成主要是在综合场景软件中,利用系统工具软件(STK)来实现的。该软件是用于航空航天通信领域的一个仿真和数据分析工具,支持多种形式的二维、三维显示引擎,可逼真地显示卫星、运载火箭、飞机、地面设施等对象的运动状态;还支持加载外部地形地貌数据,构建真实的三维地理环境。STK分析引擎用于计算数据,其中一个核心能力是生成各种坐标系下的位置和姿态数据[2]。
在飞行任务中,参与试验的对象包括飞机、导弹、地面站等3类,见图2。地面站部署在地面的O点,并通过雷达探测飞机的位置。飞机运动到指定位置A点时,发射导弹。地面站通过雷达探测导弹的位置。

图2 飞行任务示意图
在整个试验任务时间段内,飞机在飞行过程中实时下传位置数据;当飞机飞行至A点发射导弹后,飞机下传导弹的相对位置数据;地面雷达站下传对飞机和导弹的测量数据。在飞行试验的实时态势显示中,即需要显示飞机和导弹的真实状态,也需要显示二者的测量状态。
因此,在完整的试验过程中,STK需要接收如下数据,如表1所示。
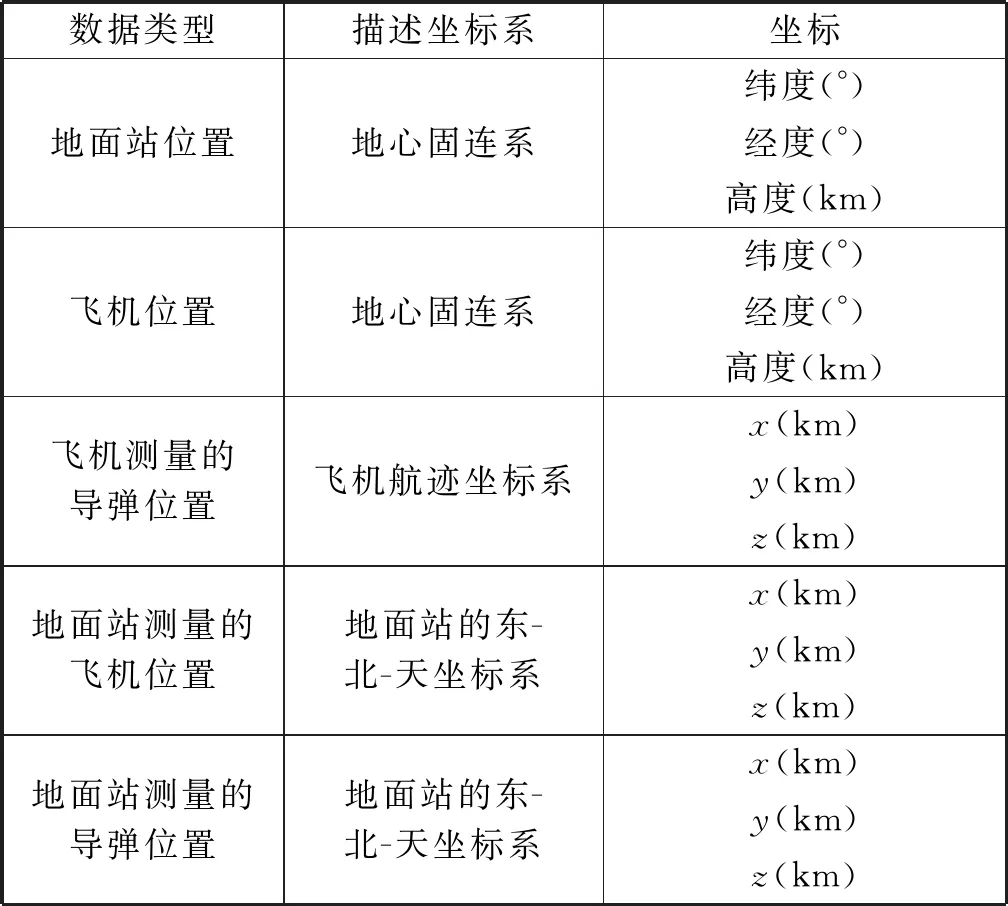
表1 传输数据种类
软件接收到所有数据之后,将各对象实时显示在STK的三维窗口中;同时需要解算飞机/导弹位置的真实数据与测量数据进行对比,支持测量精度的分析。
地面站位置和飞机位置都是在WGS84地理坐标系下的纬度、经度和高度,该坐标系在STK中已经自带,不需要自定义创建,在使用时仅需调用即可,如图3、图4所示。

图3 地面站的坐标描述

图4 飞机的坐标描述
2 航迹坐标转换
综合场景软件将各目标航迹生成之后通过Ftp将轨迹文件发送至显控软件。然后将航迹文件中WGS84坐标下的数据转换到地心直角坐标系中。
WGS84大地坐标系属于地心坐标系,即以地心作为椭球体中心,它是以地球旋转轴作为Z轴,Z轴指向BIH1984.0定义的协议地球极方向,X轴指向BIH1984.0的起始子午面和赤道的交点,Y轴与X轴和Z轴构成右手系。目前GPS测量数据多以WGS-1984为基准。对应于WGS-84大地坐标系,有一个WGS-84椭球,如图5所示,其常数采用IUGG第17届大会大地测量常数的推荐值。下面介绍WGS-84椭球参考模型。
地球可以近似看做是一个椭球,公式为:
(1)
式中:X,Y,Z为地球表面上一点的坐标;a为地球长半轴长度(m),在WGS84中,a=6 378 137.0 m;b为地球短半轴长度(m),在WGS84中,b=6 356 752.314 2 m。
于是有:
(2)
式中:Rp为P点的卯酉圈曲率半径(m);e为地球第一偏心率常数,并有e2=0.006 694 379 901 4;e′为地球第二偏心率常数。
如图5所示,设空间一点P的大地坐标用大地纬度B,大地经度L和大地高H表示,点P′是其在XOY平面(赤道面)的投影。其中,P点的大地子午面和起始大地子午面所构成的二面角L是P点的大地经度,即∠XOP′,从起始大地子午面算起,向东为正,向西为负;P点的法线和赤道面的夹角B是P点的大地纬度,即过参考椭球上一点M的垂线PM与赤道平面相交的角度。从赤道算起,向北为正,向南为负。而过参考椭球体上一点N与地心O的连线OP与赤道平面的夹角B′为地心纬度。P点沿法线到地球球面的距离H是大地高度,从地球球面起,向外为正,向内为负。该P点以(L,B,H)来表示大地坐标系,以(X0,Y0,Z0)来表示地心直角坐标系(地固坐标系)。
设P点地理位置(L,B,H),则由大地坐标系变换到地心直角坐标系的公式:
(3)
式中:L、B、H为P点所处地理位置的经纬度、高程(MP长度);Rp为及卯酉圈曲率半径,即CM的长度;a为地球椭球体的长半轴长度;e2为地球第一偏心率常数的平方。
3 坐标投影
雷达北天东系到雷达天线阵面系的转换:2个坐标系之间进行方位角β和仰角α2个角度的转换,其中,雷达坐标系的X轴与北向东向组成的平面的夹角为仰角,指向与天的方向一致时夹角为正,反之为负;雷达坐标系X轴在北东面上的投影与北向的夹角为方位角,从天向观测,逆时针为正,则旋转过程为:首先要绕Y轴转β,后绕Z轴旋转α,则旋转矩阵为:
(4)
假设目标、目标模拟器在雷达北天东坐标系下的坐标为(x,y,z),转换到雷达天线阵面坐标系下的坐标为(x0,y0,z0),则目标由雷达北天东坐标系转到雷达天线阵面坐标系下的转换关系为:
(5)
4 航迹文件传输
航迹文件传输主要分为两部分,一部分是控制航迹文件生成的控制命令传输;一部分是航迹数据的传输。
4.1 控制命令传输
当操作员用显控软件进行目标配置之后会向综合场景软件发送相关控制命令。当前传输机制为高级体系结构(HLA)分布式设计。HLA是基于订阅/发布模式的分布式架构,订阅发布模式定义了一种一对多的依赖关系,让多个订阅者同时监听某一个主题对象。这个主题对象在自身状态变化时,会通知所有订阅者,使它们能够自动更新自己的状态。
在本仿真系统中,仿真对象是分离耦合的,相互之间独立而又有密切关联,一个联邦成员对象的改变,会直接影响到其他系统中关联的对象。据此设计出图6的分布式结构,联邦成员组成为:
(1) 显控软件联邦成员,负责在试验初始化时给综合场景软件发送任务数据;试验进行时控制综合场景软件的启动/停止;控制状态监控软件的保存/停止保存试验数据;
(2) 服务器系统联邦成员,负责接收采集的和解析后的试验数据;
(3) 综合场景软件联邦成员,负责接收显控软件发送的任务数据,接收显控软件的启动/停止;
(4) 状态监控联邦成员,负责接收显控软件的保存/停止保存指令,将采集的和解析后的试验数据保存/停止保存在服务器数据库中。

图6 分布式设计
系统初始化成功后,在服务器系统上创建HLA联邦,其它各个系统加入该联邦,成为联邦成员。
HLA联邦运行启动,显控软件邦员给综合场景软件邦员和状态监控邦员发送试验启动指令和停止指令。
综合场景软件邦员通过HLA接收显控软件邦员的任务指令,载入本地的场景想定文件,进行任务初始化,生成场景文件和航迹文件。
HLA由RTI服务进行实时运行支撑,系统集成了联邦对象模型、联邦对象管理、联盟管理、仿真时间管理、数据分发管理等功能。
4.2 航迹数据传输
如图7所示,将显控软件作为FTP服务器,综合场景软件将场景文件和航迹文件编辑好后通过FTP推送到综合显控软件本地文件夹。操作员通过显控软件分配目标之后,生成的新的场景文件,并通知其他相关软件来获取新的场景文件和对应的目标航迹文件。

图7 航迹文件FTP传输示意图
5 结束语
本文主要阐述了目标航迹的生成、坐标转换、传输等过程。综合场景软件通过HLA通信架构接收显控软件中操作员下发的控制命令,利用STK开发包生成操作员拟定的目标航迹文件,并通过FTP文件传输协议将文件放置显控软件FTP服务器,然后在显控软件中完成航迹数据的坐标转换和投影转换,生成仿真环境下的航迹数据,供其他软件使用。
猜你喜欢
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
导航定位学报(2022年2期)2022-04-11
家庭影院技术(2021年7期)2021-08-14
语数外学习·高中版中旬(2021年11期)2021-02-14
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08