基于Si4463的道路照明系统的设计与实现
2021-01-05 12:31:30邬志锋王贵恩
科技风 2021年35期
邬志锋 王贵恩








摘 要:针对当前城市道路照中普遍存在的能耗过高、人力成本高、智能化程度低等不足,本文结合4G公众网和无线通信技术设计了实现一套主要由上位机客户端、4G/RF网关、LED单灯控制器成的道路照明控制系统,该系统实现了路灯的远程手动或自动控制、路灯状态监测、路灯—环境协同等功能。该系统已应用于某市政工程,测试表明该系统响应迅速,报障准确,系统稳定,降低了道路照明系统的维护成本,且该系统可以根据环境的亮度、道路上汽车和行人的情况自动调节路灯状态,保持汽车前方的照明范围能完全覆盖驾驶员的安全视距,实现路灯自适应照明,提高了道路照明的智能化。
關键词:道路照明;4G通信技术;自组网;智能化;路灯—环境协同
城市道路照明是社会公共设施的重要组成部分,但是目前路灯行业存在能源费用高和运维费用高两大痛点[1],据统计“十二五”期间,我国1064个城市仅主干道照明路灯就新增833万盏,交装功率总计407万千瓦,管理人员约5万人[2]。为了解决这两个痛点,提高路灯控制的自动化智能化,近些年发展出了基于电力线通信、GPRS、Lora、NB-IOT、ZigBee等通信技术的路灯系统,但是在实际使用中存在诸如通信干扰较大、延迟较长、易受天气影响、无法及时发现定位路灯故障、不能进行精准控制等弊端[3],且无法实时根据路上行人、车辆情况实时调整路灯亮度,不能实现路灯的智能化控制。
针对当前道路照明系统存在的以上不足,本系统融合4G通信技术、无线通信技术和智能传感器技术设计实现了一种新型智能道路控制系统,主要实现了远程控制路灯开关、亮度,采集路灯电压、电流、功率因子等状态;自动巡检,自动识别路灯是否故障,并自动告警;实时采集环境光亮度、车流信息、行人信息,并据此调整路灯的亮度等功能,有效解决了以上问题。
1 系统组成及工作原理
本道路照明系统自上而下由上位机客户端、4G/RF网关、LED单灯控制器成三部分构成。LED单灯控制器的主要作用输出0~10V调光信号控制LED灯具的亮度,同时使用传感器获取路灯工作状态、环境信息。4G/RF网关安装在智能电表中,主要作用是获取当前配电箱的电流、电压等信息,并为上位机客户端和LED单灯控制器之间的通信提供中转服务。上位机客户端是为了完成相关管理工作设计的一套PC软件,主要作用对LED路灯、配电箱的电流、电压进行监控,结合亮度信息识别LED路灯是否出现故障。
系统可实现两种控制方式:智能控制、手动控制。智能控制主要是由智能路灯配电柜根据当前时间、环境光亮度、路面车流量、人流等信息,进行智能判断,调节照明亮度,满足路面实际照明需求。手动控制主要用于突发状况,可通过客户端进行远程控制路灯开关灯、调整亮度,也可以在智能路灯配电柜上进行现场控制。
2 硬件设计
2.1 LED单灯控制器设计
LED单灯控制器是本系统的控制终端,LED单灯控制器终端节点负责使用传感器采集路灯的电压、电流、功率因子,环境光亮度、车流人流信息,并将这些信息通过Si4463无线通信模块上传到智能路灯配电柜,同时输出0~10V调光信号控制LED灯具的亮度,其结构如图1所示。
2.1.1 微控制器选型
根据LED单灯控制器的功能要求,考虑实现时需要用到的通信接口等功能组件、开发成本、稳定性因素,本系统选用意法公司的STM32F103C8T6作为主控芯片,STM32F103系列微控制器采用3.3V工作电压,内部包含了PWM发生器、USART通信接口、模数转换器、定时器等模块,同时具有高性能、高可靠性等优点[4]。STM32F103C8微控制器使用其SPI1口与RF芯片Si4463进行通信,使用USART2与电能计量芯片HT7017通信,使用内部ADC的输入通道7采集环境光亮度传感器的模拟信号量,使用IO口PA6获取微波传感器的状态。
2.1.2 Si4463通信模块
无线通信是实现远程控制和测量的基础,无线通信频率的选择是本系统的一个难点,首先由于一个网关所控制的LED单灯控制器最多可达256台,所以无线通信速度不能太低;其次公路是一种非常特殊的通信场景,汽车点火装置会在7~300MHz这个频率段上产生大量的辐射干扰[5];第三,除了道路主干道外,路灯还会安装在背街小巷中,此时路灯会被周边大量较高的建筑物所遮挡,所以要求无线通信的绕射能力要比较强[6]。根据路灯无线通信的以上三个特点,经过大量的实验证明,433MHz这个频率最适合用于LED单灯控制器与智能路灯配电柜之间的无线通信。根据工作频率和通信功率要求,本系统选择了Silicon Labs公司的Si4463通信模块。Si4463通信模块工作在119~1050MHz频率段,最大输出功率20dBm,接收灵敏度高达-126dBm,领道选择性-60dB,最大传输速度1000kbps[7]。
2.1.3 电能计量电路
电能计量电路的作用是测量路灯灯具实际的工作电压、电流和功率因子,同时LED单灯控制器根据电能计量的结果和实际控制输出的功率进行比较,判断灯具是否出现故障,电路如图2所示。
本系统使用的是钜泉光电科技(上海)有限公司HT7017单相电能计量芯片,HT7017是一颗带UART通讯接口的高精度单相多功能计量芯片,内部含有三路22位Sigma-Delta ADC,不经能测量电流、电压,还可以测量有功功率、无功功率。如图2所示,220V交流电压通过P1端子送入互感器L1中,经过互感器转换的电压信号由HT7017进行测量,同理电流互感器通过P2端子送入HT7017进行测量。测量的电流、电压、有功功率、无功功率等电能参数通过UART接口发送给微控制器。
2.1.4 PWM/电压转换电路
目前大多数LED灯具使用的是0~10V模拟直流电压调光,同时考虑到本系统的LED单灯控制器需要同时控制两个LED灯具和STM32F103C内部没有DAC等原因,本系统使用了PWM通过RC低通滤波器模拟DAC的方式产生0~10V的直流电压[8],电路如图3所示。
微控制器使用定时器TIM2产生频率为150Hz的PWM信号,经过R3、C2构成的低通滤波器滤波后得到平均值电压V,设PWM信号的高电平为Vh,占空比为η,则平均值电压V为:
运算放大器构成一个同相比例放大电路对V进行放大,输出到LED灯具的调光电压为:
所以,只要按照要求调整占空比为η即可以调节LED灯具调光电压在0~10V之间变化,同时由于R3和C2构成的滤波电路截止频率远小于PWM频率,所以有效抑制了输出端电压的突变,避免了LED灯具亮度的突变,使LED灯具的亮度调节自然柔和。
2.2 4G/RF網关设计
4G/RF网关是现场控制核心,主要作用是实现上位机客户端与LED单灯控制器通信,并将智能电表的电能数据、环境数据等状态信息上传到上位机客户端。4G/RF网关在结构上由上行DTU、主控电路板和电能表、水浸传感器、开箱传感器等传感器组成,主控电路板和传感器通过RS485总线相连。主控电路板主要由微控制器和无线通信模块构成。
2.2.1 微控制器选型
由于微控制器需要使用4G模块、无线通信模块和RS485接口进行大量的通信,同时还要进行LED单灯控制器的网络维护,所以其运算量较大,本系统采用了STM32F205R作为控制核心。STM32F205R是基于Cortex-M3内核的微控制器,工作频率高达120MHz,具有150DMIPS的执行速度,同时具有SPI、USART等丰富的外部接口[9],如图4所示,微控制器使用其USART3接成RS485接口与4G通信模块E20通信,使用USART1接口接成RS485接口与外部的传感器通信,使用SPI1接口与无线通信模块Si4463进行通信,使用SPI2把相关的配置、状态信息存在外部的W25Q16中。
2.2.2 上行DTU选型
目前数路灯控制器数据上行到控制平台主要使用的是GPRS和NB-IOT两种方式,但是这两种方式的通信速度都较低,没办法满足智能路灯配电柜大量数据上传的速度要求,同时考虑到目前2G网络正在关停,所以本系统选择了4G数据终端,该DTU使用RS485接口与微控制器的USART3连接。
3 软件设计
软件设计主要包括LED单灯控制器程序设计、4G/RF网关程序设计、PC端程序设计。
3.1 LED单灯控制器程序设计
LED单灯控制器程序的主要功能接收、处理4G/RF网关转发的指令和临近LED单灯控制器的传感器数据,采集传感器的数据并广播给临近控制器,智能调光灯。
LED单灯控制器在接收到数据包后首先使用CRC判断接收到的数据包是否正确,对于正确的数据包主要是要判断本机控制器是否要执行该数据包的指令和是否要转发该数据包,程序流程图如图5所示。
是否需要执行该数据包的指令的方法:如果接收到是广播型数据包,LED单灯控制器通过包号判断该数据包是否被接收处理过,如果包号不同说明该数据包是第一次被接收,需要被处理,如果本地地址在广播数据包的执行列表中,LED单灯控制器就要分析、执行该数据包对应的指令,否则不处理。对于单播型数据包,如果本机地址是路由列表的最后一跳,则说明本机是该命令的目的地址,单灯控制器需要执行并应答该指令。应答的方法是:讲需要返回的数据装入数据包的参数区,然后将路由表倒置,使数据包可以从发送路径原路返回,同时将本机的RSSI装入数据包中,告知智能路灯配电柜本机与上一跳之间的通信质量,以便其进行网络维护。
是否转发数据包的判断方法:对于第一次接收到的广播数据包,LED单灯控制器判断本机是否在路由列表之中,如果在,则将路由指针加1使数据包指向下一个转发地址,然后将该数据包发送出去。对于单播数据包,如果本机不是最后一跳则说明本机是路由转发节点,LED单灯控制器将路由指针加1后再将数据包转发。
针对传统路灯只能定时开关灯或者远程控制的不足,本系统在传统的这两个功能之上设计根据环境智能开关灯、调光的功能,实现了道路照明与环境的协同。各LED单灯控制器利用微波传感器获取路面的实际车辆通行情况和接收临近LED单灯控制器发送出来的车辆通行信息,预测照亮范围内的车辆情况并根据《城市道路照明设计标准CJJ45-2015》计算路灯亮度,然后以计算结果为输入、以实际亮度为反馈,使用PID算法进行柔性调光,保持司机视野内的亮度稳定,满足《城市道路照明设计标准CJJ45-2015》的要求,在车辆通过后迅速减低亮度,实现节能减排。
3.2 4G/RF网关程序设计
4G/RF网关程序的主要功能是转发上位机客户端下发的数据包、采集上传各传感器的数据和LED单灯控制器自组网的维护。
根据路灯带状分布的特点,本系统设计了以智能配电柜为中心的有中心多跳自组网,所以组网的关键是根据接收信号强度(Received Signal Strength Indication,RSSI)寻找能稳定通信到的最远的LED单灯控制器作为路由节点,RSSI反映的是接收方接收到的无线信号强度,其值越大说明通知质量越好,一般来说是随着距离增大而降低,也会收到周围环境遮蔽的影响[10]。组网的程序流程如图6所示。
4G/RF网关上电后首先清除原有的路由表,然后根据PC端下传的LED单灯控制器列表下发LED单灯控制器的短地址,使各单灯控制器能使用短地址运行。4G/RF网关依次采集路由节点后面的每一个LED单灯控制器的电参数,依据通信协议,控制器在返回电能参数的同时会返回最后一次通信的RSSI,即路由节点与其通信的RSSI,如果RSSI大于设定的阈值,则说明可以继续增加通信的距离,则通信短地址加1,与下一个LED单灯控制器通信,如此经过多次迭代,直到找出第一个RSSI小于阈值的LED单灯控制器为止,该控制器即为当前路由节点能稳定通信到的下一个最远LED单灯控制器,所以其作为下一跳的路由节点。4G/RF网关执行多次尝试,直至找出6个路由节点,完成自组网为止。
大量实验发现在公路这种特殊场景下进行的无线通信容易受到车流量、天气等因素影响,所以必须对于已经形成的自组网进行实时维护,确保通信的可靠性。如图6所示,根据组网方法本系统是以采集LED单灯控制器传感器数据时返回的RSSI为依据,实时判断各个LED单灯控制器的通信质量,并据此重新指定新的最佳路由节点,形成新的自组网。
3.3 上位机客户端程序设计
上位机客户端的主要作用是资产管理、人员管理、路面实时状态监控、路灯状态监控。管理人员可以通过上位机客户端界面查看4G/RF网关、LED单灯控制器上传的实时数据,根据对数据的分析可以手动或者自动对路灯的运行状态进行设定,同时管理软件会自动根据各LED单灯控制器输出的亮度值与实际电能参数比较,分析判断路灯是否发生故障,如果确认其发生了故障,软件会发出报警,并将发生故障的路灯的具体地址信息、故障原因发送给客户端,降低运维的难度。
4 系统测试
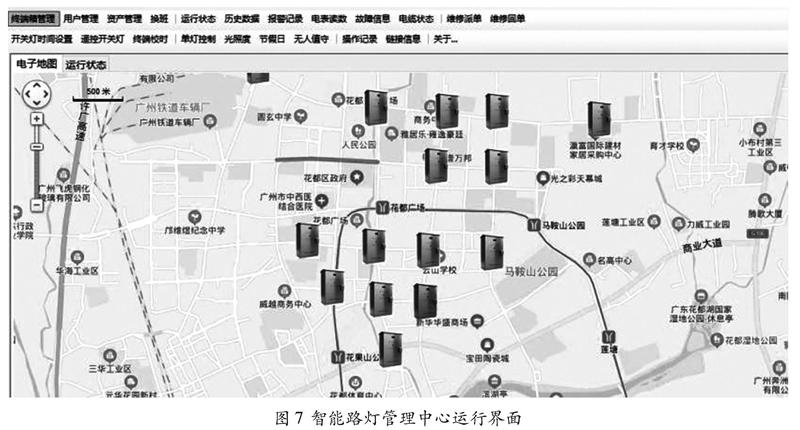
本系统运行界面如图7所示,LED单灯控制界面如图8所示。
经过长时间的运行表明,在控制距离上,在主干道双侧布灯、灯杆高度12米、距离40米的条件下,本系统单侧可稳定传输至少70个灯杆、距离2800米左右;在故障检测方面,可迅速发现LED灯老化亮度不足、损坏故障,并能准确定位到灯杆;在智能控制方面,能按照日出日落、环境亮度、车辆等条件进行开关灯、亮度调节。
5 结论
本系统将4G公众网和无线通信技术相结合,并基于RSSI构成自组网,实现了路灯的单灯开光、亮度的精准控制,LED单灯控制器还能及时发现路灯故障并定位故障路灯位置,提高了维护、维修的针对性,有效降低了路灯的运维成本;同时本系统还实现了根据日出日落时间、环境光亮度、车流量信息对路灯的智能化路灯控制,不仅降低了路灯的电能消耗,还可延长照明设施的使用寿命。
参考文献:
[1]张立萍,柴万东,孟散散.蚁群算法在智能LED路灯控制中的应用研究[J].光电子·激光,2017,28(06):584-590.
[2]陈坚,胡开明.基于GPRS和ZigBee两级网络的智能路灯控制[J].电工技术,2020(04):25-27.
[3]吴龙波.浅谈路灯单灯控制系统在城市道路照明中的应用[J].河南建材,2018(01):249-250+252.
[4]林砺宗,徐俊锋,翟俊忠.基于SIM900A的工程车辆远程监控系统[J].仪表技术与传感器,2018(02):79-82.
[5]张海滨.超短波通信常见无线电干扰特点及排查方法[J].电子技术与软件工程,2019(02):43.
[6]林海阔,李涛,朱继红,等.城市背街小巷LED路灯控制方案的探讨[J].照明工程学报,2018,29(01):60-62.
[7]薛善良,楊佩茹,周奚.基于模糊神经网络的WSN无线数据收发单元故障诊断[J].计算机科学,2018,45(05):38-43.
[8]林海军,赖小强,兰浩,汪鲁才.LED路灯光照强度自适应控制方法[J].电子测量与仪器学报,2016,30(06):887-894.
[9]戴国群,谢建鸿.基于STM32F205芯片的耐压型电池管理系统的研制[J].电源技术,2016,40(12):2428-2431.
[10]卫宗敏,张勇波.基于多次约束匹配的室内定位算法[J].科学技术与工程,2019,19(24):268-273.
基金项目:2020年广东省科技创新战略专项重点项目(pdjh2020a0972);广东省交通运输厅科技计划项目(2011-02-047)
作者简介:邬志锋(1985— ),男,广东河源人,硕士,讲师,研究方向:智能电子产品设计、嵌入式系统应用。
猜你喜欢
启蒙(3-7岁)(2018年12期)2018-12-13 02:03:48
中国交通信息化(2018年10期)2018-02-16 07:39:50
电子制作(2017年14期)2017-12-18 07:07:58
小学阅读指南·低年级版(2017年11期)2017-12-06 15:14:59
中国交通信息化(2016年5期)2016-06-06 03:51:48
照明工程学报(2016年3期)2016-06-01 12:18:01
作文评点报·低幼版(2014年31期)2014-09-18 11:04:16
单片机与嵌入式系统应用(2014年8期)2014-03-23 23:18:21
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13
机械与电子(2014年3期)2014-02-28 02:07:51