
多自由度机械臂的智能控制策略设计研究
2021-01-03 14:12赵郅滔谢清全
科技信息·学术版 2021年35期
关键词:智能控制
赵郅滔 谢清全
摘要:多自由度机械使用期间,动态变化的模型参数、难以预知的噪声干扰,导致当前策略难以满足控制要求。基于此,本文提出滑模自适应智能控制策略改进方案,参考动力方程,分析控制误差产生的原因,设计出可调整扰动数据的模型。以此避免收敛性误差影响、非奇异性误差影响,设计出来的积分滑模面,可避免非连续项引发的误差影响,并设计双幂次逼近滑模。借助仿真实验,验证改进滑膜控制策略,确保控制精度、自适应能力,以此将自由度机械臂控制稳定与速度提升,确保自由度机械臂抗扰动能力的提升。
关键词:自由度机械臂;智能控制;策略制定
自人工智能、机器人技术推广,机械臂在航空、医疗与工业等领域得到了广泛使用[1]。其可结合任务需求,借助控制策略,完成轨迹作业。自由度机械臂动作轨迹控制较为复杂,模型参数变化较大,计算模型存在这明显的非线性、外界扰动未知等问题,对控制性能有着严重影响。本文综合考虑系统动态时变、耦合性与输入犊复杂等特性,引入滑膜控制,借助鲁棒性与解耦性,提升响应速度,优化自由度机械臂的控制,提升控制效果。
1 自由度机械臂数学模型
多自由度机械臂控制系统内,动力方程为先高度非线性特性,可呈现明显的动态非协调性,这也是影响自由度机械臂精准控制的根本原因。若未能建设精准的模型,即便是小参数变化,也会对控制效果产生影响。基于此,针对自由度机械臂动力特性,设计针对性的数学模型,其方程如下:
θ代表机械臂关节角度;M(θ)代表相应惯性;G(θ)代表相应重力; 代表相应离心性; 代表加速度。方程右侧t代表机械臂受到的控制力矩,td代表机械臂受到的扰动力矩。结合多角度机械臂动力方程可得知,纳入了扰动参数,但由于无法精准获取扰动量,进而在机械臂运动阶段,任何参数均无法扰动,会对控制性能产生影响。基于此,就参数扰动特性,设计参数自我调整模型:
式子中,M0(θ)代表扰动之前的参数;G0(θ)代表扰动补偿参数; 代表扰动补偿参数。将系统受到的扰动参数调整偏差整体视作d0,多角度机械臂状态模型可描述为:
2 自适应滑膜控制策略设计
为精准描述模型参数误差带来的影响,在传统的滑膜控制基础上,本文设计出积分滑模面,主要如下:
为机械臂角度误差; 为角速度误差; 为误差系数, 为误差系数; 与 之间满足关系式 = (1- )。在此滑模面基础上,选择非奇异处理,能够将控制系统的输入划分到等效控制Uep,扰动控制Usmc,Uep求解,可根据积分滑模面、系统误差计算,计算式:
Uep计算并没包含非奇异项,可避免奇异性对性能的影响。除此之外,本文咋建设滑模控制期间,选择积分滑膜,避免滑膜收敛停滞现象的出现。在滑膜逼近时,比如:包含非连续项处理,会导致控制结果产生振荡,且对控制效果产生影响,使得生命周期大幅度的缩短。在采取取幂次逼近,能够将取幂次逼近性能改善。基于此,本文设计取幂次逼近:
为正定矩阵, 为正定矩阵;
与 满足关系式 =2- 。結合之前公式,可计算扰动控制Usmc,计算式为:
此时,整理可获得多自由度机械臂滑膜控制规律,主要如下:
所对应的自由度机械臂滑膜自适应控制模型,见下图1。
3 实验与结果分析
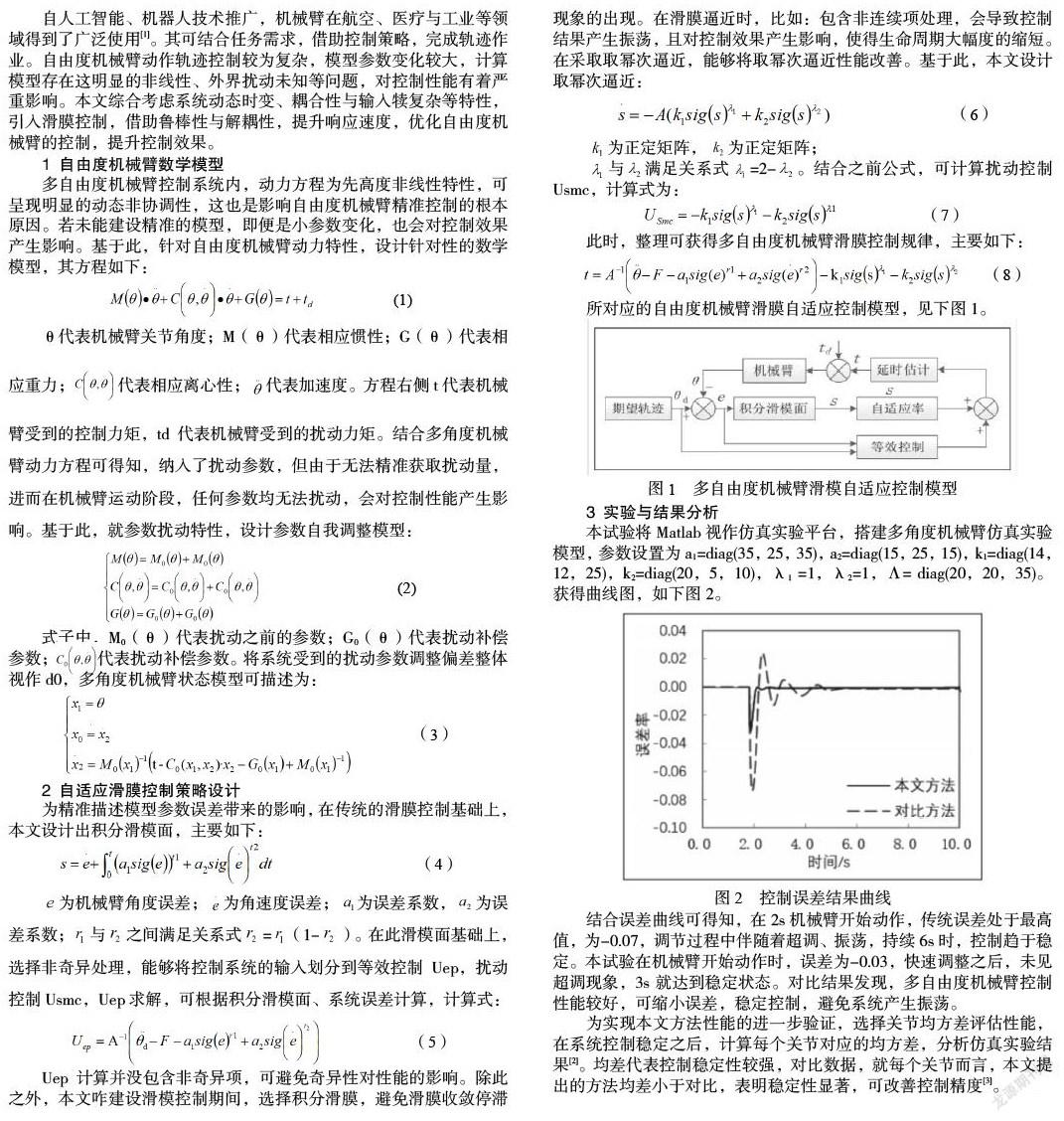
本试验将Matlab视作仿真实验平台,搭建多角度机械臂仿真实验模型,参数设置为a1=diag(35,25,35),a2=diag(15,25,15),k1=diag(14,12,25),k2=diag(20,5,10),λ1 =1,λ2=1,Λ= diag(20,20,35)。获得曲线图,如下图2。
结合误差曲线可得知,在2s机械臂开始动作,传统误差处于最高值,为-0.07,调节过程中伴随着超调、振荡,持续6s时,控制趋于稳定。本试验在机械臂开始动作时,误差为-0.03,快速调整之后,未见超调现象,3s就达到稳定状态。对比结果发现,多自由度机械臂控制性能较好,可缩小误差,稳定控制,避免系统产生振荡。
为实现本文方法性能的进一步验证,选择关节均方差评估性能,在系统控制稳定之后,计算每个关节对应的均方差,分析仿真实验结果[2]。均差代表控制稳定性较强,对比数据,就每个关节而言,本文提出的方法均差小于对比,表明稳定性显著,可改善控制精度[3]。
本文提出的多自由度机械臂智能控制策略,可实现控制精度、控制稳定性的提升,能够实现系统参数改善,减少系统振荡发生率。究其原因,建设合理对数学模型,能够对不确定扰动产生分析,避免对结果产生影响,结合扰动,建设自适应模型。设计、改进滑膜控制律,减少非奇异性、非连续性带来的影响。
结束语
综上所述,为实现自由度机械臂控制性能的提升,需要提出滑膜适应控制策略改进。通过建设自由度机械臂动力模型,分析误差产生的原因,将扰动误差引入气质感呢。在数学模型基础上,提出滑膜控制,并适当改进,设计出积分滑模面,避免出现非奇异性影响,双幂次逼近设计,可避免非连续顶的影响,能够确保自适应滑膜控制效率,以此提升适应能力与适应精度。
参考文献:
[1]郭海全,刘烨,周秋坤.多自由度机械臂反演自适应滑模智能控制方法设计[J].智能计算机与应用,2020,10(12):16-17.
[2]张锦,靳炜,殷玉枫.基于智能感应的多自由度机械臂系统的设计探讨[J].机械工程与自动化,2020(02):180-181+184.
[3]张念猛,程雅琳,张艳.多自由度机械臂的智能控制策略设计研究[J].电子测试,2019(22):49-50+88.
作者简介:
赵郅滔(1999.6-)男,汉,四川绵阳,在读学生,专科,单位:四川大学锦城学院,单位所在省市及邮编:四川省成都市,611731。
谢清全(2001.5-)男,汉,四川省巴中市,在读学生,大专,单位:四川大学锦城学院,单位所在省市及邮编:四川省成都市,611731。
猜你喜欢
卷宗(2016年10期)2017-01-21
山东工业技术(2016年23期)2016-12-23
山东工业技术(2016年23期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
计算机教育(2016年10期)2016-12-19
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14
